 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmall-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms: Challenges and a Roadmap
Mar 07, 2025This article proposes a roadmap to address the current challenges in small-scale testbeds for Connected and Automated Vehicles (CAVs) and robot swarms. The roadmap is a joint effort of participants in the workshop "1st Workshop on Small-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms," held on June 2 at the IEEE Intelligent Vehicles Symposium (IV) 2024 in Jeju, South Korea. The roadmap contains three parts: 1) enhancing accessibility and diversity, especially for underrepresented communities, 2) sharing best practices for the development and maintenance of testbeds, and 3) connecting testbeds through an abstraction layer to support collaboration. The workshop features eight invited speakers, four contributed papers [1]-[4], and a presentation of a survey paper on testbeds [5]. The survey paper provides an online comparative table of more than 25 testbeds, available at https://bassamlab.github.io/testbeds-survey. The workshop's own website is available at https://cpm-remote.lrt.unibwmuenchen.de/iv24-workshop.
A Survey on Small-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms
Aug 26, 2024



Connected and automated vehicles and robot swarms hold transformative potential for enhancing safety, efficiency, and sustainability in the transportation and manufacturing sectors. Extensive testing and validation of these technologies is crucial for their deployment in the real world. While simulations are essential for initial testing, they often have limitations in capturing the complex dynamics of real-world interactions. This limitation underscores the importance of small-scale testbeds. These testbeds provide a realistic, cost-effective, and controlled environment for testing and validating algorithms, acting as an essential intermediary between simulation and full-scale experiments. This work serves to facilitate researchers' efforts in identifying existing small-scale testbeds suitable for their experiments and provide insights for those who want to build their own. In addition, it delivers a comprehensive survey of the current landscape of these testbeds. We derive 62 characteristics of testbeds based on the well-known sense-plan-act paradigm and offer an online table comparing 22 small-scale testbeds based on these characteristics. The online table is hosted on our designated public webpage www.cpm-remote.de/testbeds, and we invite testbed creators and developers to contribute to it. We closely examine nine testbeds in this paper, demonstrating how the derived characteristics can be used to present testbeds. Furthermore, we discuss three ongoing challenges concerning small-scale testbeds that we identified, i.e., small-scale to full-scale transition, sustainability, and power and resource management.
Cyber-Physical Mobility Lab An Open-Source Platform for Networked and Autonomous Vehicles
Apr 21, 2020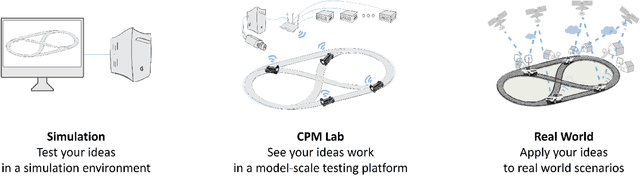
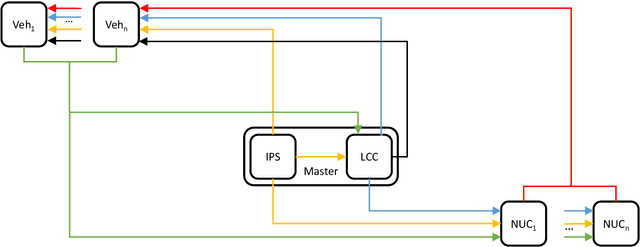
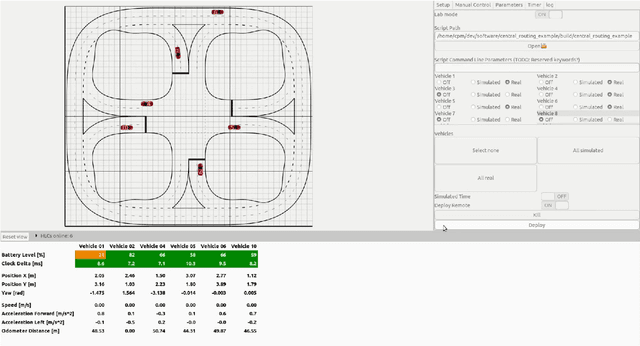
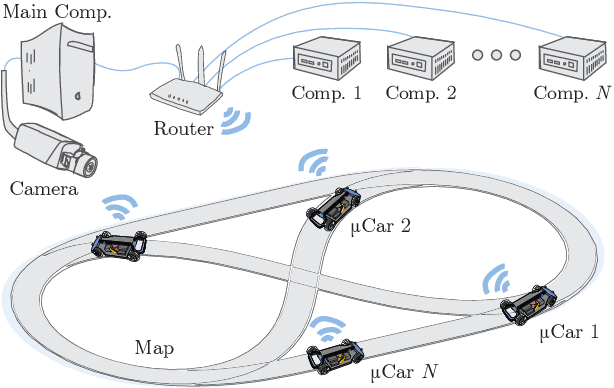
We introduce our Cyber-Physical Mobility Lab (CPM Lab), a development environment for networked and autonomous vehicles. It consists of 20 model-scale vehicles for experiments and a simulation environment. We show our four-layered architecture that enables the seamless use of the same software in simulations and in experiments without any adaptions. A Data Distribution Service (DDS) based middleware allows to adapt the number of vehicles during experiments in a seamless manner. Experiments with the 20 vehicles can be extended by unlimited additional simulated vehicles. Another layer is responsible for synchronizing all entities following a logical execution time approach. We pursue an open policy in the CPM Lab and will publish the entire code as well as construction plans online. Additionally, we will offer a remote-access to the CPM Lab using a web interface. The remote-access will be publicly available. The CPM Lab allows researchers as well as students from different disciplines to see their ideas develop into reality.