 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Wheel Sensor Communication using ESP32 -- A Contribution towards a Digital Twin of the Road System
Sep 04, 2025While current onboard state estimation methods are adequate for most driving and safety-related applications, they do not provide insights into the interaction between tires and road surfaces. This paper explores a novel communication concept for efficiently transmitting integrated wheel sensor data from an ESP32 microcontroller. Our proposed approach utilizes a publish-subscribe system, surpassing comparable solutions in the literature regarding data transmission volume. We tested this approach on a drum tire test rig with our prototype sensors system utilizing a diverse selection of sample frequencies between 1 Hz and 32 000 Hz to demonstrate the efficacy of our communication concept. The implemented prototype sensor showcases minimal data loss, approximately 0.1 % of the sampled data, validating the reliability of our developed communication system. This work contributes to advancing real-time data acquisition, providing insights into optimizing integrated wheel sensor communication.
Modern Middlewares for Automated Vehicles: A Tutorial
Dec 10, 2024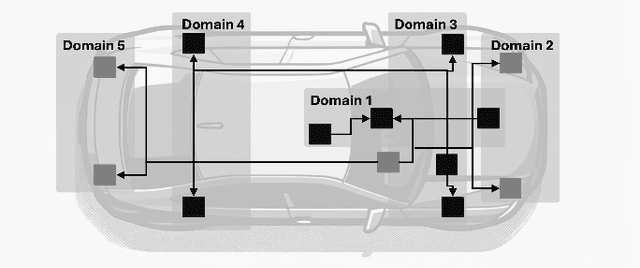
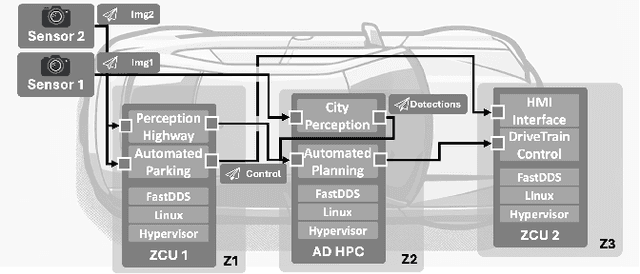
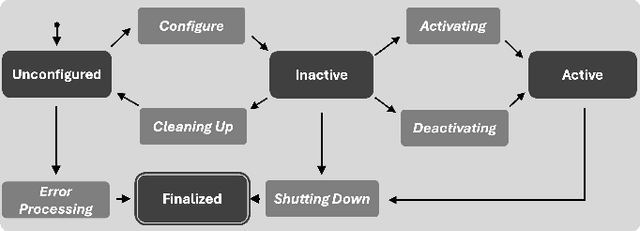
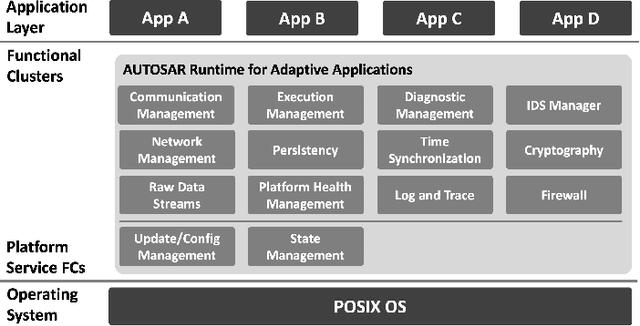
This paper offers a tutorial on current middlewares in automated vehicles. Our aim is to provide the reader with an overview of current middlewares and to identify open challenges in this field. We start by explaining the fundamentals of software architecture in distributed systems and the distinguishing requirements of Automated Vehicles. We then distinguish between communication middlewares and architecture platforms and highlight their key principles and differences. Next, we present five state-of-the-art middlewares as well as their capabilities and functions. We explore how these middlewares could be applied in the design of future vehicle software and their role in the automotive domain. Finally, we compare the five middlewares presented and discuss open research challenges.
Evaluating the Explainable AI Method Grad-CAM for Breath Classification on Newborn Time Series Data
May 13, 2024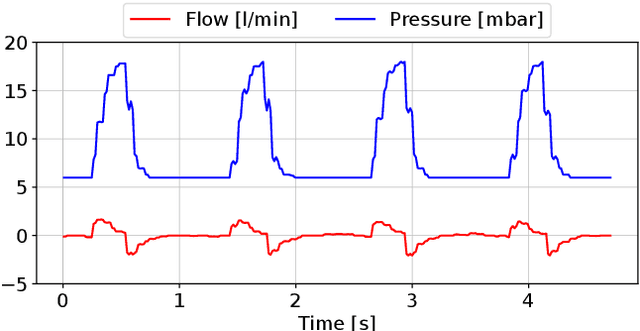
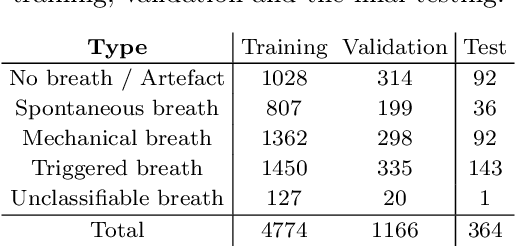
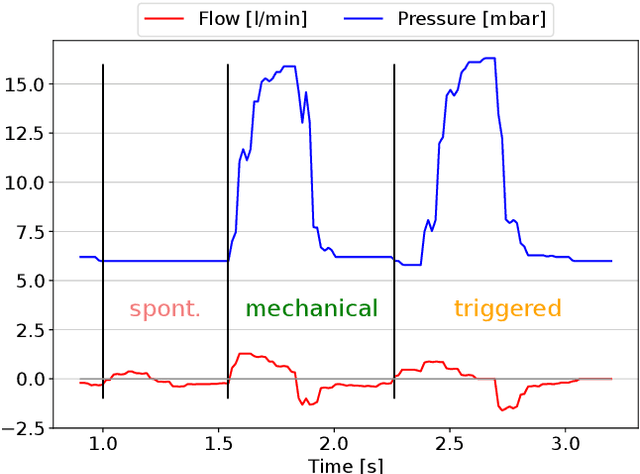
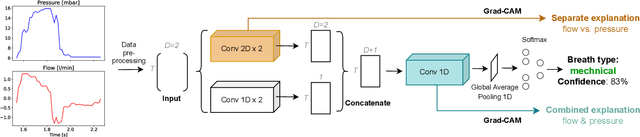
With the digitalization of health care systems, artificial intelligence becomes more present in medicine. Especially machine learning shows great potential for complex tasks such as time series classification, usually at the cost of transparency and comprehensibility. This leads to a lack of trust by humans and thus hinders its active usage. Explainable artificial intelligence tries to close this gap by providing insight into the decision-making process, the actual usefulness of its different methods is however unclear. This paper proposes a user study based evaluation of the explanation method Grad-CAM with application to a neural network for the classification of breaths in time series neonatal ventilation data. We present the perceived usefulness of the explainability method by different stakeholders, exposing the difficulty to achieve actual transparency and the wish for more in-depth explanations by many of the participants.
Infrared Beacons for Robust Localization
Apr 19, 2021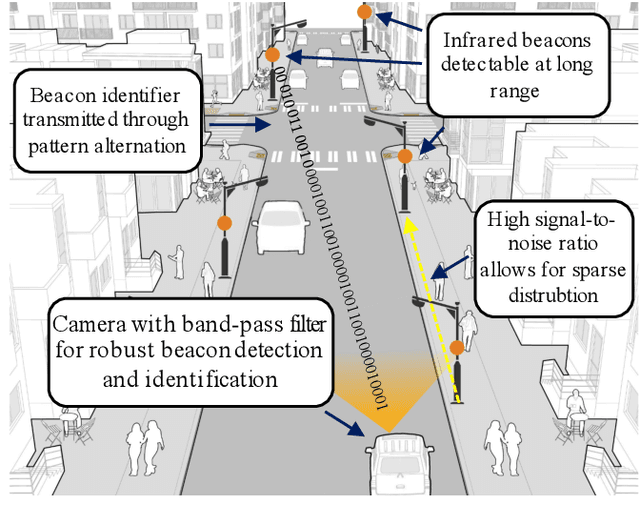
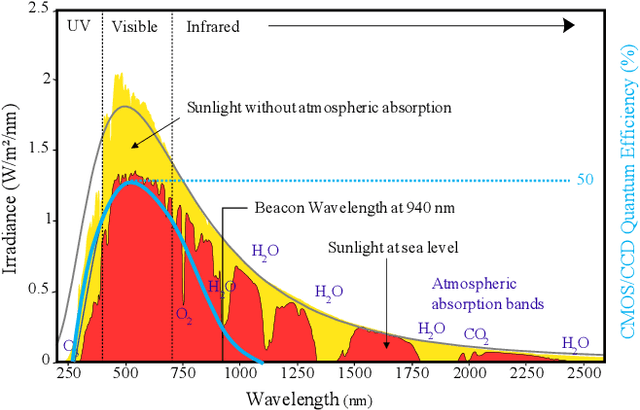
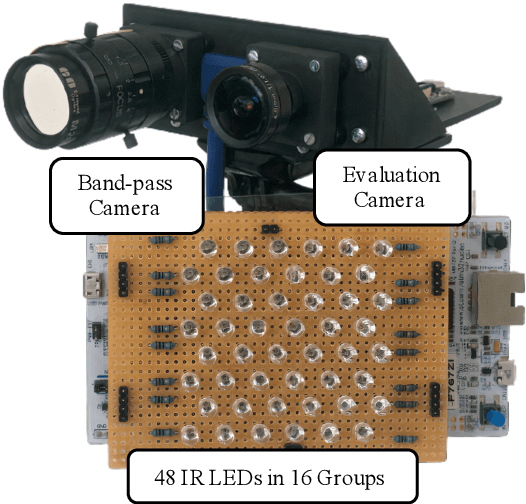

This paper presents a localization system that uses infrared beacons and a camera equipped with an optical band-pass filter. Our system can reliably detect and identify individual beacons at 100m distance regardless of lighting conditions. We describe the camera and beacon design as well as the image processing pipeline in detail. In our experiments, we investigate and demonstrate the ability of the system to recognize our beacons in both daytime and nighttime conditions. High precision localization is a key enabler for automated vehicles but remains unsolved, despite strong recent improvements. Our low-cost, infrastructure-based approach helps solve the localization problem. All datasets are made available.
Cyber-Physical Mobility Lab An Open-Source Platform for Networked and Autonomous Vehicles
Apr 21, 2020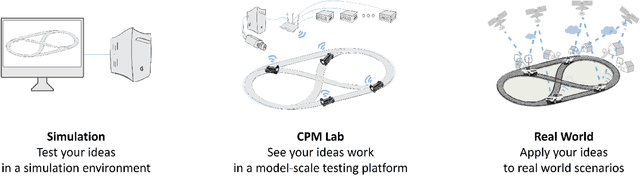
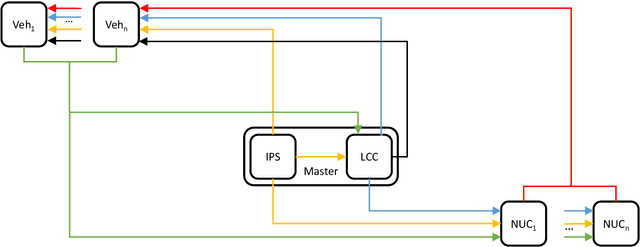
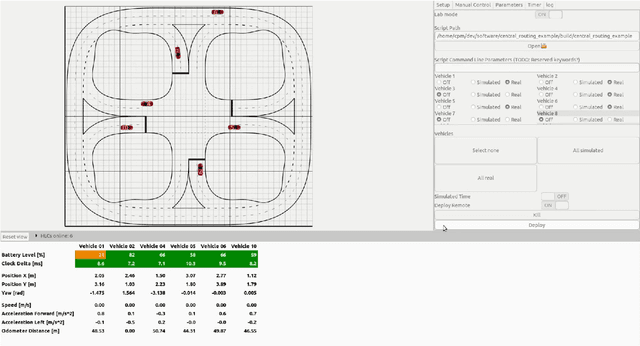
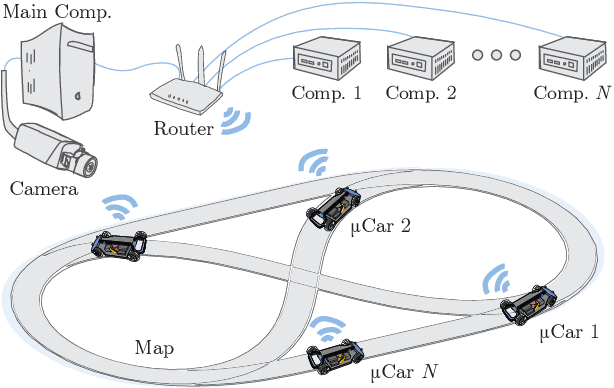
We introduce our Cyber-Physical Mobility Lab (CPM Lab), a development environment for networked and autonomous vehicles. It consists of 20 model-scale vehicles for experiments and a simulation environment. We show our four-layered architecture that enables the seamless use of the same software in simulations and in experiments without any adaptions. A Data Distribution Service (DDS) based middleware allows to adapt the number of vehicles during experiments in a seamless manner. Experiments with the 20 vehicles can be extended by unlimited additional simulated vehicles. Another layer is responsible for synchronizing all entities following a logical execution time approach. We pursue an open policy in the CPM Lab and will publish the entire code as well as construction plans online. Additionally, we will offer a remote-access to the CPM Lab using a web interface. The remote-access will be publicly available. The CPM Lab allows researchers as well as students from different disciplines to see their ideas develop into reality.
Networked and Autonomous Model-scale Vehicles for Experiments in Research and Education
Apr 17, 2020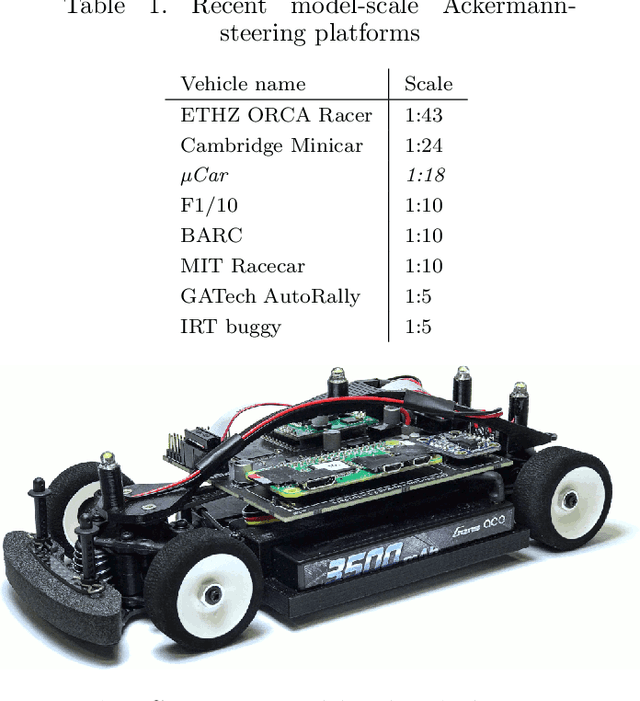
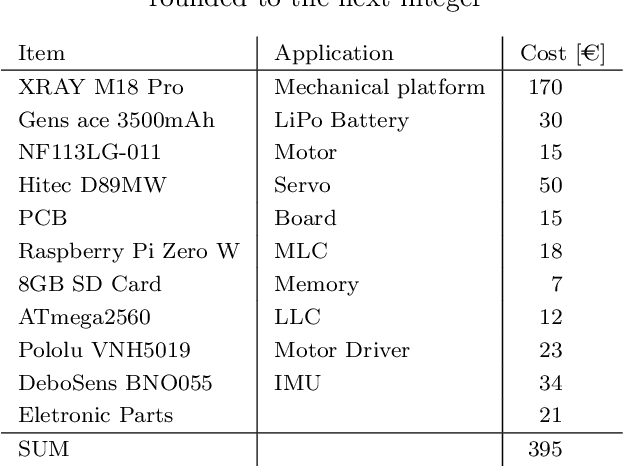
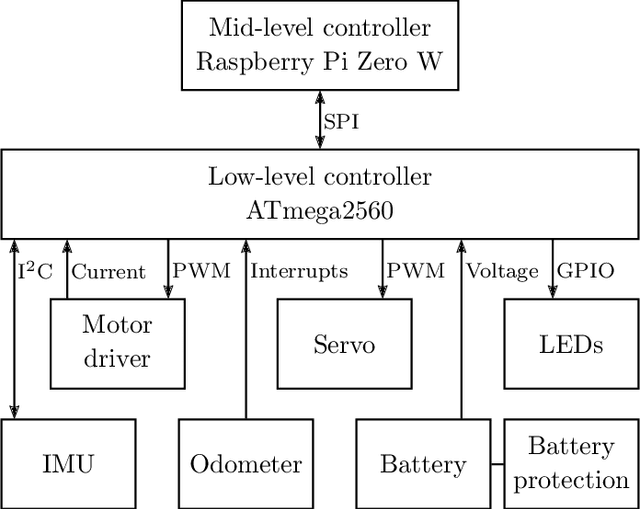
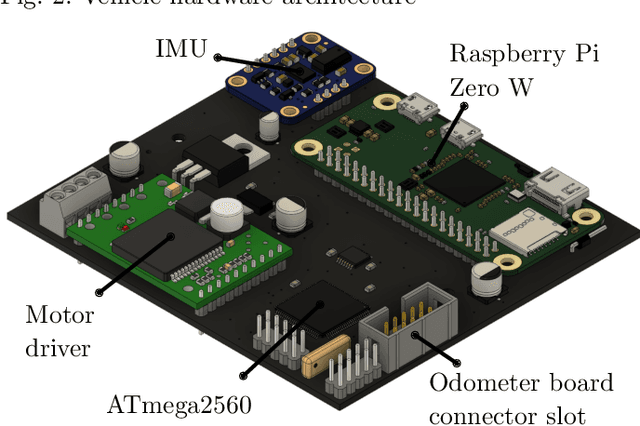
This paper presents the $\mathrm{\mu}$Car, a 1:18 model-scale vehicle with Ackermann steering geometry developed for experiments in networked and autonomous driving in research and education. The vehicle is open source, moderately costed and highly flexible, which allows for many applications. It is equipped with an inertial measurement unit and an odometer and obtains its pose via WLAN from an indoor positioning system. The two supported operating modes for controlling the vehicle are (1) computing control inputs on external hardware, transmitting them via WLAN and applying received inputs to the actuators and (2) transmitting a reference trajectory via WLAN, which is then followed by a controller running on the onboard Raspberry Pi Zero W. The design allows identical vehicles to be used at the same time in order to conduct experiments with a large amount of networked agents.