 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmall-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms: Challenges and a Roadmap
Mar 07, 2025This article proposes a roadmap to address the current challenges in small-scale testbeds for Connected and Automated Vehicles (CAVs) and robot swarms. The roadmap is a joint effort of participants in the workshop "1st Workshop on Small-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms," held on June 2 at the IEEE Intelligent Vehicles Symposium (IV) 2024 in Jeju, South Korea. The roadmap contains three parts: 1) enhancing accessibility and diversity, especially for underrepresented communities, 2) sharing best practices for the development and maintenance of testbeds, and 3) connecting testbeds through an abstraction layer to support collaboration. The workshop features eight invited speakers, four contributed papers [1]-[4], and a presentation of a survey paper on testbeds [5]. The survey paper provides an online comparative table of more than 25 testbeds, available at https://bassamlab.github.io/testbeds-survey. The workshop's own website is available at https://cpm-remote.lrt.unibwmuenchen.de/iv24-workshop.
Graph Coloring to Reduce Computation Time in Prioritized Planning
Jan 18, 2025



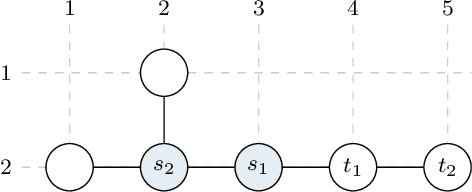
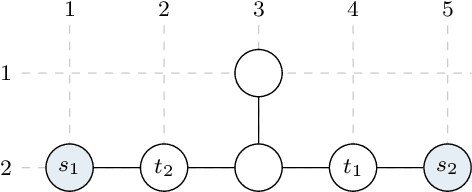
Distributing computations among agents in large networks reduces computational effort in multi-agent path finding (MAPF). One distribution strategy is prioritized planning (PP). In PP, we couple and prioritize interacting agents to achieve a desired behavior across all agents in the network. We characterize the interaction with a directed acyclic graph (DAG). The computation time for solving MAPF problem using PP is mainly determined through the longest path in this DAG. The longest path depends on the fixed undirected coupling graph and the variable prioritization. The approaches from literature to prioritize agents are numerous and pursue various goals. This article presents an approach for prioritization in PP to reduce the longest path length in the coupling DAG and thus the computation time for MAPF using PP. We prove that this problem can be mapped to a graph-coloring problem, in which the number of colors required corresponds to the longest path length in the coupling DAG. We propose a decentralized graph-coloring algorithm to determine priorities for the agents. We evaluate the approach by applying it to multi-agent motion planning (MAMP) for connected and automated vehicles (CAVs) on roads using, a variant of MAPF.
Simultaneous Computation with Multiple Prioritizations in Multi-Agent Motion Planning
Jan 18, 2025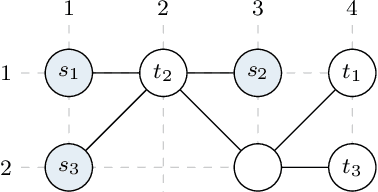

Multi-agent path finding (MAPF) in large networks is computationally challenging. An approach for MAPF is prioritized planning (PP), in which agents plan sequentially according to their priority. Albeit a computationally efficient approach for MAPF, the solution quality strongly depends on the prioritization. Most prioritizations rely either on heuristics, which do not generalize well, or iterate to find adequate priorities, which costs computational effort. In this work, we show how agents can compute with multiple prioritizations simultaneously. Our approach is general as it does not rely on domain-specific knowledge. The context of this work is multi-agent motion planning (MAMP) with a receding horizon subject to computation time constraints. MAMP considers the system dynamics in more detail compared to MAPF. In numerical experiments on MAMP, we demonstrate that our approach to prioritization comes close to optimal prioritization and outperforms state-of-the-art methods with only a minor increase in computation time. We show real-time capability in an experiment on a road network with ten vehicles in our Cyber-Physical Mobility Lab.
Limiting Computation Levels in Prioritized Trajectory Planning with Safety Guarantees
Sep 08, 2024In prioritized planning for vehicles, vehicles plan trajectories in parallel or in sequence. Parallel prioritized planning offers approximately consistent computation time regardless of the number of vehicles but struggles to guarantee collision-free trajectories. Conversely, sequential prioritized planning can guarantee collision-freeness but results in increased computation time as the number of sequentially computing vehicles, which we term computation levels, grows. This number is determined by the directed coupling graph resulted from the coupling and prioritization of vehicles. In this work, we guarantee safe trajectories in parallel planning through reachability analysis. Although these trajectories are collision-free, they tend to be conservative. We address this by planning with a subset of vehicles in sequence. We formulate the problem of selecting this subset as a graph partitioning problem that allows us to independently set computation levels. Our simulations demonstrate a reduction in computation levels by approximately 64% compared to sequential prioritized planning while maintaining the solution quality.
A Survey on Small-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms
Aug 26, 2024



Connected and automated vehicles and robot swarms hold transformative potential for enhancing safety, efficiency, and sustainability in the transportation and manufacturing sectors. Extensive testing and validation of these technologies is crucial for their deployment in the real world. While simulations are essential for initial testing, they often have limitations in capturing the complex dynamics of real-world interactions. This limitation underscores the importance of small-scale testbeds. These testbeds provide a realistic, cost-effective, and controlled environment for testing and validating algorithms, acting as an essential intermediary between simulation and full-scale experiments. This work serves to facilitate researchers' efforts in identifying existing small-scale testbeds suitable for their experiments and provide insights for those who want to build their own. In addition, it delivers a comprehensive survey of the current landscape of these testbeds. We derive 62 characteristics of testbeds based on the well-known sense-plan-act paradigm and offer an online table comparing 22 small-scale testbeds based on these characteristics. The online table is hosted on our designated public webpage www.cpm-remote.de/testbeds, and we invite testbed creators and developers to contribute to it. We closely examine nine testbeds in this paper, demonstrating how the derived characteristics can be used to present testbeds. Furthermore, we discuss three ongoing challenges concerning small-scale testbeds that we identified, i.e., small-scale to full-scale transition, sustainability, and power and resource management.
Optimization-based motion primitive automata for autonomous driving
Jan 25, 2024Trajectory planning for autonomous cars can be addressed by primitive-based methods, which encode nonlinear dynamical system behavior into automata. In this paper, we focus on optimal trajectory planning. Since, typically, multiple criteria have to be taken into account, multiobjective optimization problems have to be solved. For the resulting Pareto-optimal motion primitives, we introduce a universal automaton, which can be reduced or reconfigured according to prioritized criteria during planning. We evaluate a corresponding multi-vehicle planning scenario with both simulations and laboratory experiments.
Cyber-Physical Mobility Lab An Open-Source Platform for Networked and Autonomous Vehicles
Apr 21, 2020
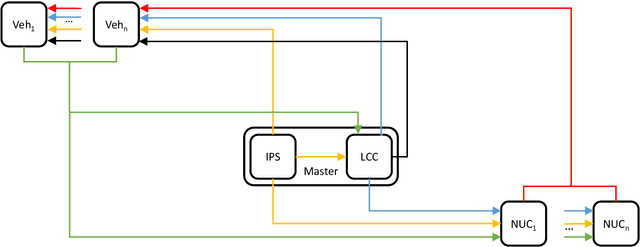
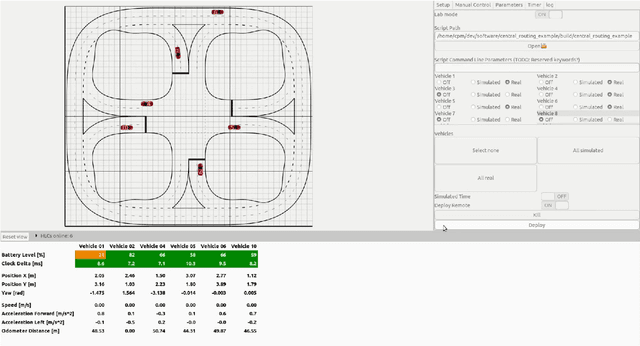
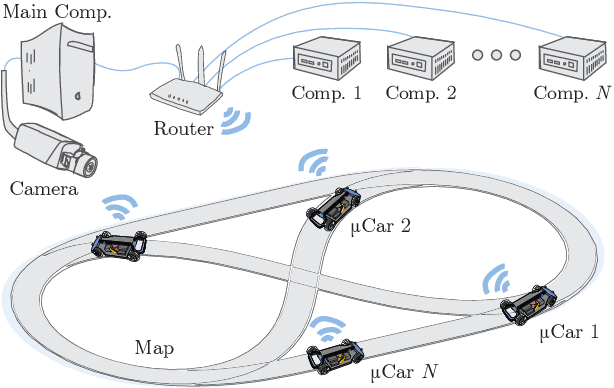
We introduce our Cyber-Physical Mobility Lab (CPM Lab), a development environment for networked and autonomous vehicles. It consists of 20 model-scale vehicles for experiments and a simulation environment. We show our four-layered architecture that enables the seamless use of the same software in simulations and in experiments without any adaptions. A Data Distribution Service (DDS) based middleware allows to adapt the number of vehicles during experiments in a seamless manner. Experiments with the 20 vehicles can be extended by unlimited additional simulated vehicles. Another layer is responsible for synchronizing all entities following a logical execution time approach. We pursue an open policy in the CPM Lab and will publish the entire code as well as construction plans online. Additionally, we will offer a remote-access to the CPM Lab using a web interface. The remote-access will be publicly available. The CPM Lab allows researchers as well as students from different disciplines to see their ideas develop into reality.
Networked and Autonomous Model-scale Vehicles for Experiments in Research and Education
Apr 17, 2020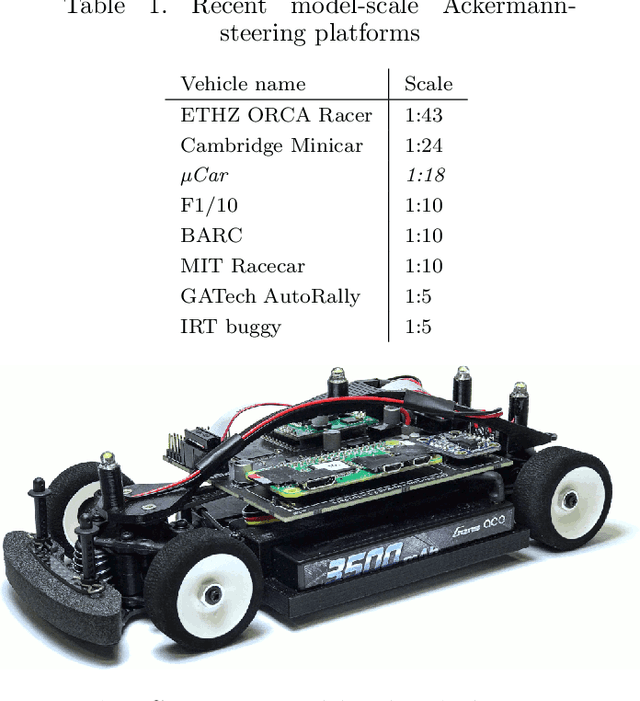
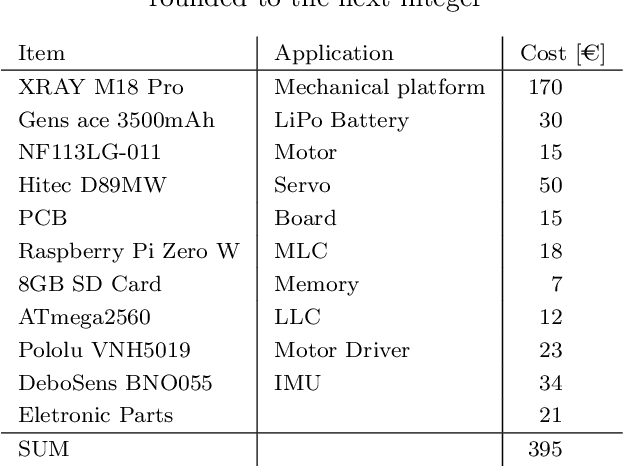
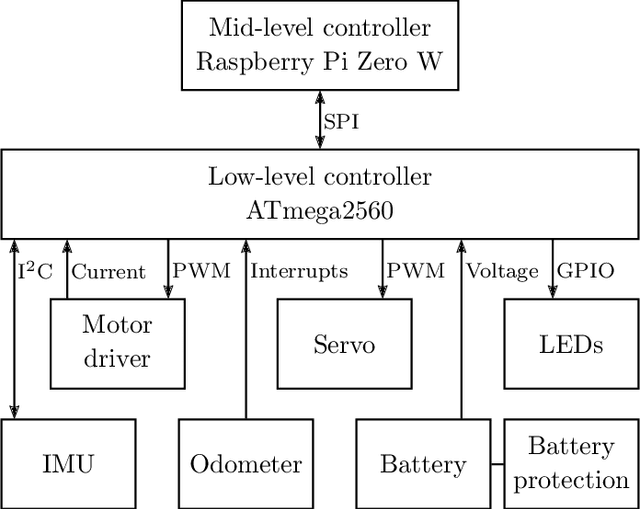
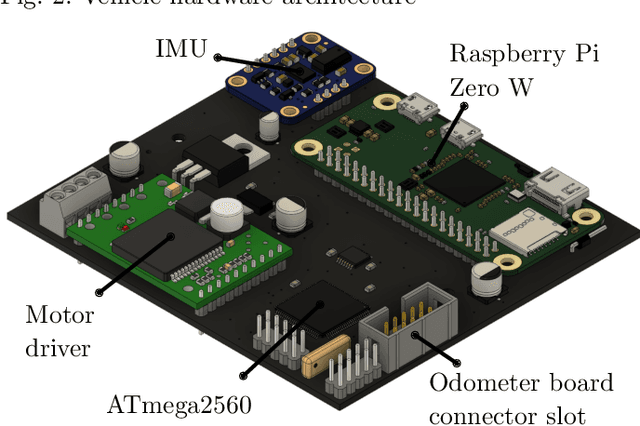
This paper presents the $\mathrm{\mu}$Car, a 1:18 model-scale vehicle with Ackermann steering geometry developed for experiments in networked and autonomous driving in research and education. The vehicle is open source, moderately costed and highly flexible, which allows for many applications. It is equipped with an inertial measurement unit and an odometer and obtains its pose via WLAN from an indoor positioning system. The two supported operating modes for controlling the vehicle are (1) computing control inputs on external hardware, transmitting them via WLAN and applying received inputs to the actuators and (2) transmitting a reference trajectory via WLAN, which is then followed by a controller running on the onboard Raspberry Pi Zero W. The design allows identical vehicles to be used at the same time in order to conduct experiments with a large amount of networked agents.