 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCyber-Physical Mobility Lab An Open-Source Platform for Networked and Autonomous Vehicles
Paper and Code
Apr 21, 2020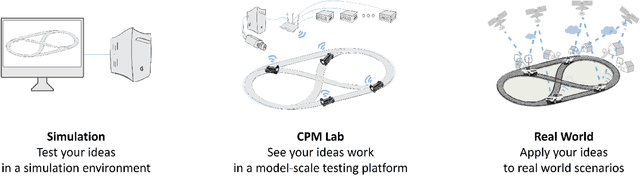
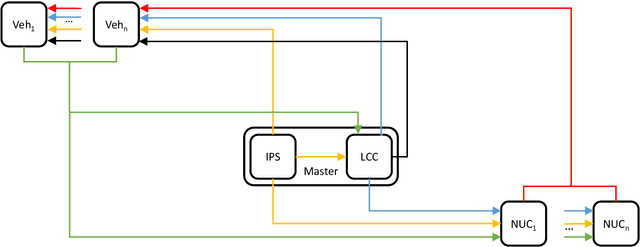
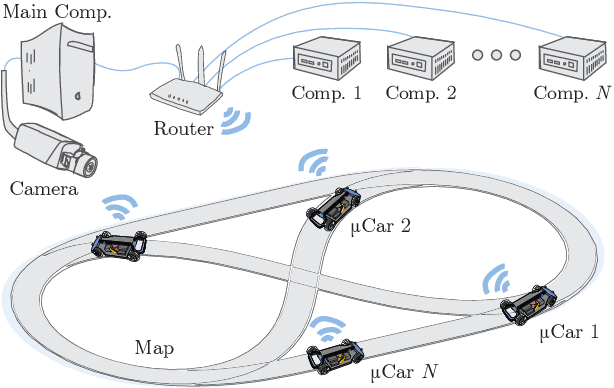
We introduce our Cyber-Physical Mobility Lab (CPM Lab), a development environment for networked and autonomous vehicles. It consists of 20 model-scale vehicles for experiments and a simulation environment. We show our four-layered architecture that enables the seamless use of the same software in simulations and in experiments without any adaptions. A Data Distribution Service (DDS) based middleware allows to adapt the number of vehicles during experiments in a seamless manner. Experiments with the 20 vehicles can be extended by unlimited additional simulated vehicles. Another layer is responsible for synchronizing all entities following a logical execution time approach. We pursue an open policy in the CPM Lab and will publish the entire code as well as construction plans online. Additionally, we will offer a remote-access to the CPM Lab using a web interface. The remote-access will be publicly available. The CPM Lab allows researchers as well as students from different disciplines to see their ideas develop into reality.