 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous Computation with Multiple Prioritizations in Multi-Agent Motion Planning
Jan 18, 2025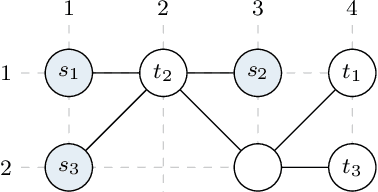

Multi-agent path finding (MAPF) in large networks is computationally challenging. An approach for MAPF is prioritized planning (PP), in which agents plan sequentially according to their priority. Albeit a computationally efficient approach for MAPF, the solution quality strongly depends on the prioritization. Most prioritizations rely either on heuristics, which do not generalize well, or iterate to find adequate priorities, which costs computational effort. In this work, we show how agents can compute with multiple prioritizations simultaneously. Our approach is general as it does not rely on domain-specific knowledge. The context of this work is multi-agent motion planning (MAMP) with a receding horizon subject to computation time constraints. MAMP considers the system dynamics in more detail compared to MAPF. In numerical experiments on MAMP, we demonstrate that our approach to prioritization comes close to optimal prioritization and outperforms state-of-the-art methods with only a minor increase in computation time. We show real-time capability in an experiment on a road network with ten vehicles in our Cyber-Physical Mobility Lab.
Graph Coloring to Reduce Computation Time in Prioritized Planning
Jan 18, 2025



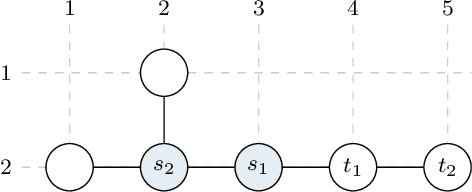
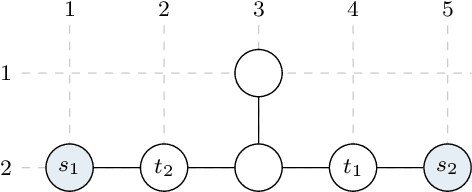
Distributing computations among agents in large networks reduces computational effort in multi-agent path finding (MAPF). One distribution strategy is prioritized planning (PP). In PP, we couple and prioritize interacting agents to achieve a desired behavior across all agents in the network. We characterize the interaction with a directed acyclic graph (DAG). The computation time for solving MAPF problem using PP is mainly determined through the longest path in this DAG. The longest path depends on the fixed undirected coupling graph and the variable prioritization. The approaches from literature to prioritize agents are numerous and pursue various goals. This article presents an approach for prioritization in PP to reduce the longest path length in the coupling DAG and thus the computation time for MAPF using PP. We prove that this problem can be mapped to a graph-coloring problem, in which the number of colors required corresponds to the longest path length in the coupling DAG. We propose a decentralized graph-coloring algorithm to determine priorities for the agents. We evaluate the approach by applying it to multi-agent motion planning (MAMP) for connected and automated vehicles (CAVs) on roads using, a variant of MAPF.