 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonplanar Model Predictive Control for Autonomous Vehicles with Recursive Sparse Gaussian Process Dynamics
Feb 18, 2026This paper proposes a nonplanar model predictive control (MPC) framework for autonomous vehicles operating on nonplanar terrain. To approximate complex vehicle dynamics in such environments, we develop a geometry-aware modeling approach that learns a residual Gaussian Process (GP). By utilizing a recursive sparse GP, the framework enables real-time adaptation to varying terrain geometry. The effectiveness of the learned model is demonstrated in a reference-tracking task using a Model Predictive Path Integral (MPPI) controller. Validation within a custom Isaac Sim environment confirms the framework's capability to maintain high tracking accuracy on challenging 3D surfaces.
A Survey on Small-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms
Aug 26, 2024



Connected and automated vehicles and robot swarms hold transformative potential for enhancing safety, efficiency, and sustainability in the transportation and manufacturing sectors. Extensive testing and validation of these technologies is crucial for their deployment in the real world. While simulations are essential for initial testing, they often have limitations in capturing the complex dynamics of real-world interactions. This limitation underscores the importance of small-scale testbeds. These testbeds provide a realistic, cost-effective, and controlled environment for testing and validating algorithms, acting as an essential intermediary between simulation and full-scale experiments. This work serves to facilitate researchers' efforts in identifying existing small-scale testbeds suitable for their experiments and provide insights for those who want to build their own. In addition, it delivers a comprehensive survey of the current landscape of these testbeds. We derive 62 characteristics of testbeds based on the well-known sense-plan-act paradigm and offer an online table comparing 22 small-scale testbeds based on these characteristics. The online table is hosted on our designated public webpage www.cpm-remote.de/testbeds, and we invite testbed creators and developers to contribute to it. We closely examine nine testbeds in this paper, demonstrating how the derived characteristics can be used to present testbeds. Furthermore, we discuss three ongoing challenges concerning small-scale testbeds that we identified, i.e., small-scale to full-scale transition, sustainability, and power and resource management.
Multi-Robot Cooperative Navigation in Crowds: A Game-Theoretic Learning-Based Model Predictive Control Approach
Oct 10, 2023



In this paper, we develop a control framework for the coordination of multiple robots as they navigate through crowded environments. Our framework comprises of a local model predictive control (MPC) for each robot and a social long short-term memory model that forecasts pedestrians' trajectories. We formulate the local MPC formulation for each individual robot that includes both individual and shared objectives, in which the latter encourages the emergence of coordination among robots. Next, we consider the multi-robot navigation and human-robot interaction, respectively, as a potential game and a two-player game, then employ an iterative best response approach to solve the resulting optimization problems in a centralized and distributed fashion. Finally, we demonstrate the effectiveness of coordination among robots in simulated crowd navigation.
Social Navigation in Crowded Environments with Model Predictive Control and Deep Learning-Based Human Trajectory Prediction
Sep 28, 2023



Crowd navigation has received increasing attention from researchers over the last few decades, resulting in the emergence of numerous approaches aimed at addressing this problem to date. Our proposed approach couples agent motion prediction and planning to avoid the freezing robot problem while simultaneously capturing multi-agent social interactions by utilizing a state-of-the-art trajectory prediction model i.e., social long short-term memory model (Social-LSTM). Leveraging the output of Social-LSTM for the prediction of future trajectories of pedestrians at each time-step given the robot's possible actions, our framework computes the optimal control action using Model Predictive Control (MPC) for the robot to navigate among pedestrians. We demonstrate the effectiveness of our proposed approach in multiple scenarios of simulated crowd navigation and compare it against several state-of-the-art reinforcement learning-based methods.
Connected and Automated Vehicles in Mixed-Traffic: Learning Human Driver Behavior for Effective On-Ramp Merging
Apr 01, 2023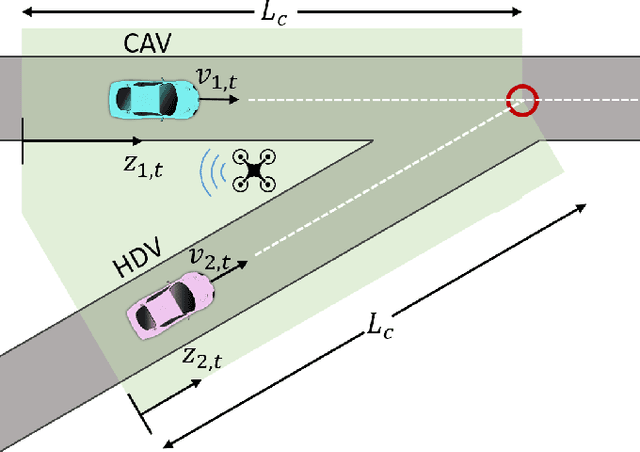
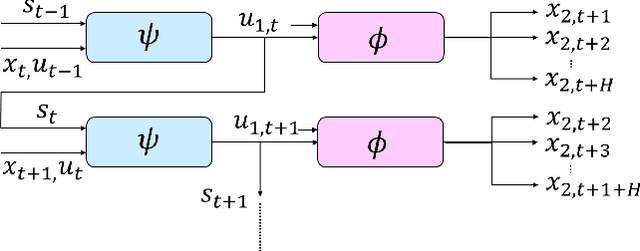
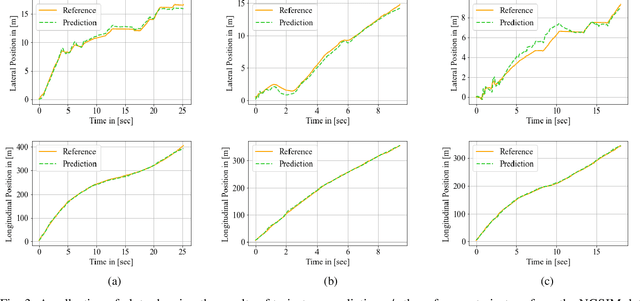
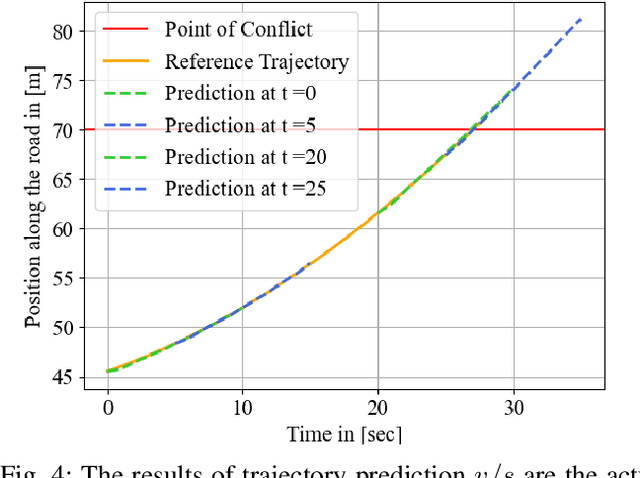
Highway merging scenarios featuring mixed traffic conditions pose significant modeling and control challenges for connected and automated vehicles (CAVs) interacting with incoming on-ramp human-driven vehicles (HDVs). In this paper, we present an approach to learn an approximate information state model of CAV-HDV interactions for a CAV to maneuver safely during highway merging. In our approach, the CAV learns the behavior of an incoming HDV using approximate information states before generating a control strategy to facilitate merging. First, we validate the efficacy of this framework on real-world data by using it to predict the behavior of an HDV in mixed traffic situations extracted from the Next-Generation Simulation repository. Then, we generate simulation data for HDV-CAV interactions in a highway merging scenario using a standard inverse reinforcement learning approach. Without assuming a prior knowledge of the generating model, we show that our approximate information state model learns to predict the future trajectory of the HDV using only observations. Subsequently, we generate safe control policies for a CAV while merging with HDVs, demonstrating a spectrum of driving behaviors, from aggressive to conservative. We demonstrate the effectiveness of the proposed approach by performing numerical simulations.
ADMM-based Adaptive Sampling Strategy for Nonholonomic Mobile Robotic Sensor Networks
Jan 27, 2021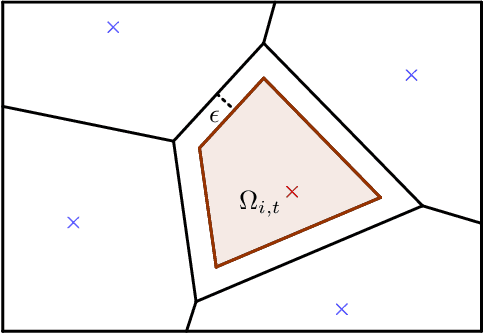
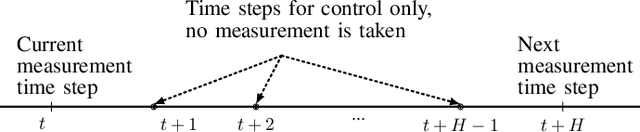
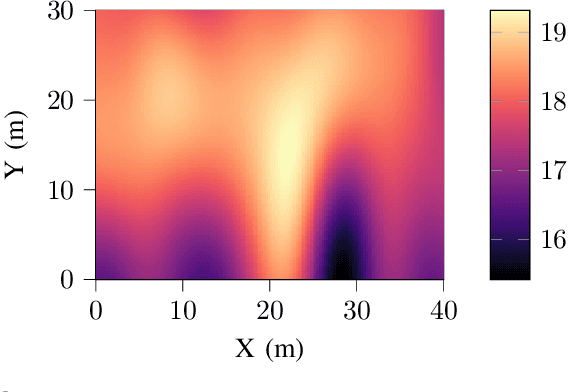

This paper discusses the adaptive sampling problem in a nonholonomic mobile robotic sensor network for efficiently monitoring a spatial field. It is proposed to employ Gaussian process to model a spatial phenomenon and predict it at unmeasured positions, which enables the sampling optimization problem to be formulated by the use of the log determinant of a predicted covariance matrix at next sampling locations. The control, movement and nonholonomic dynamics constraints of the mobile sensors are also considered in the adaptive sampling optimization problem. In order to tackle the nonlinearity and nonconvexity of the objective function in the optimization problem we first exploit the linearized alternating direction method of multipliers (L-ADMM) method that can effectively simplify the objective function, though it is computationally expensive since a nonconvex problem needs to be solved exactly in each iteration. We then propose a novel approach called the successive convexified ADMM (SC-ADMM) that sequentially convexify the nonlinear dynamic constraints so that the original optimization problem can be split into convex subproblems. It is noted that both the L-ADMM algorithm and our SC-ADMM approach can solve the sampling optimization problem in either a centralized or a distributed manner. We validated the proposed approaches in 1000 experiments in a synthetic environment with a real-world dataset, where the obtained results suggest that both the L-ADMM and SC- ADMM techniques can provide good accuracy for the monitoring purpose. However, our proposed SC-ADMM approach computationally outperforms the L-ADMM counterpart, demonstrating its better practicality.