 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-fitted Proximal Learning for Model-Based Reinforcement Learning
Apr 06, 2026Model-based reinforcement learning is attractive for sequential decision-making because it explicitly estimates reward and transition models and then supports planning through simulated rollouts. In offline settings with hidden confounding, however, models learned directly from observational data may be biased. This challenge is especially pronounced in partially observable systems, where latent factors may jointly affect actions, rewards, and future observations. Recent work has shown that policy evaluation in such confounded partially observable Markov decision processes (POMDPs) can be reduced to estimating reward-emission and observation-transition bridge functions satisfying conditional moment restrictions (CMRs). In this paper, we study the statistical estimation of these bridge functions. We formulate bridge learning as a CMR problem with nuisance objects given by a conditional mean embedding and a conditional density. We then develop a $K$-fold cross-fitted extension of the existing two-stage bridge estimator. The proposed procedure preserves the original bridge-based identification strategy while using the available data more efficiently than a single sample split. We also derive an oracle-comparator bound for the cross-fitted estimator and decompose the resulting error into a Stage I term induced by nuisance estimation and a Stage II term induced by empirical averaging.
Model-Based Reinforcement Learning Under Confounding
Dec 08, 2025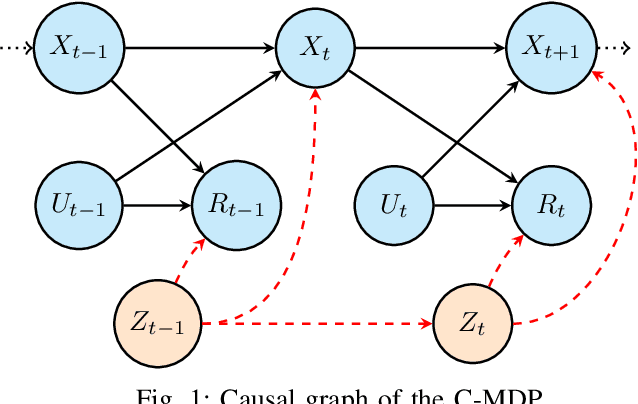
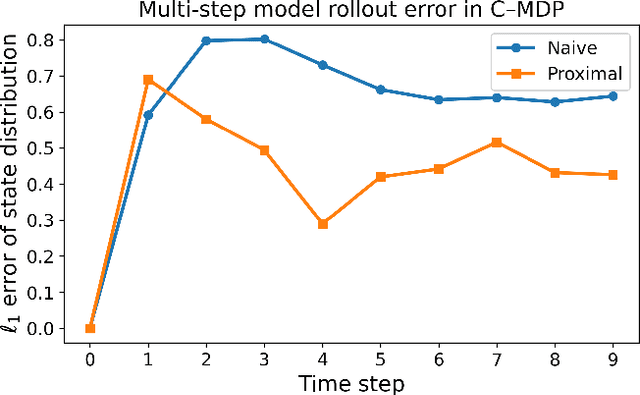
We investigate model-based reinforcement learning in contextual Markov decision processes (C-MDPs) in which the context is unobserved and induces confounding in the offline dataset. In such settings, conventional model-learning methods are fundamentally inconsistent, as the transition and reward mechanisms generated under a behavioral policy do not correspond to the interventional quantities required for evaluating a state-based policy. To address this issue, we adapt a proximal off-policy evaluation approach that identifies the confounded reward expectation using only observable state-action-reward trajectories under mild invertibility conditions on proxy variables. When combined with a behavior-averaged transition model, this construction yields a surrogate MDP whose Bellman operator is well defined and consistent for state-based policies, and which integrates seamlessly with the maximum causal entropy (MaxCausalEnt) model-learning framework. The proposed formulation enables principled model learning and planning in confounded environments where contextual information is unobserved, unavailable, or impractical to collect.
Connected and Automated Vehicles in Mixed-Traffic: Learning Human Driver Behavior for Effective On-Ramp Merging
Apr 01, 2023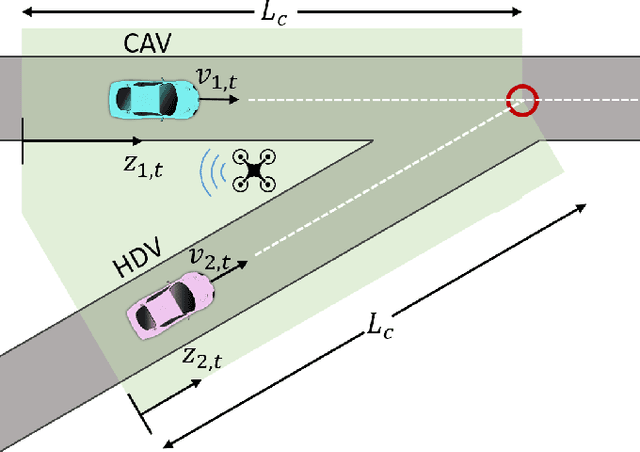
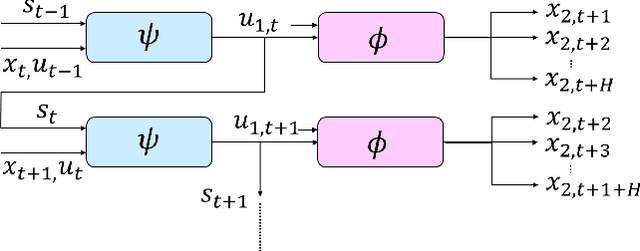
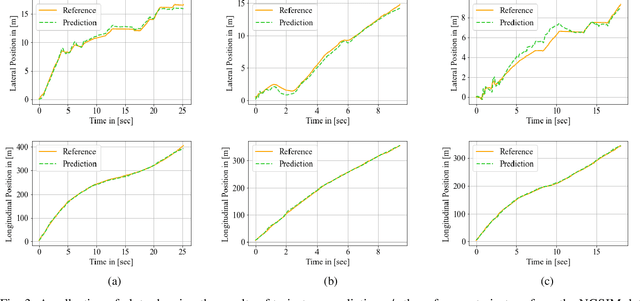
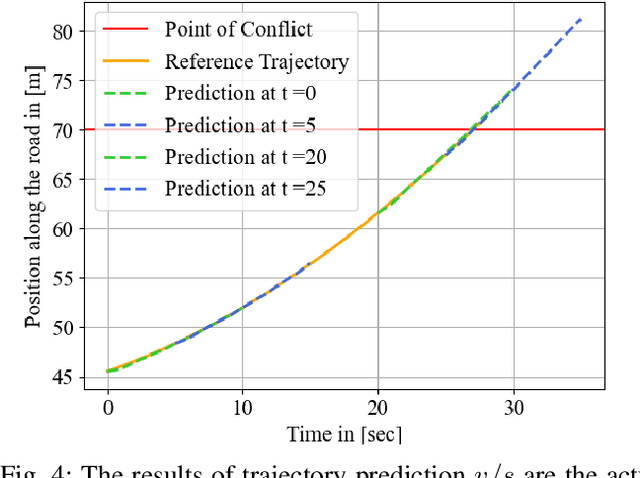
Highway merging scenarios featuring mixed traffic conditions pose significant modeling and control challenges for connected and automated vehicles (CAVs) interacting with incoming on-ramp human-driven vehicles (HDVs). In this paper, we present an approach to learn an approximate information state model of CAV-HDV interactions for a CAV to maneuver safely during highway merging. In our approach, the CAV learns the behavior of an incoming HDV using approximate information states before generating a control strategy to facilitate merging. First, we validate the efficacy of this framework on real-world data by using it to predict the behavior of an HDV in mixed traffic situations extracted from the Next-Generation Simulation repository. Then, we generate simulation data for HDV-CAV interactions in a highway merging scenario using a standard inverse reinforcement learning approach. Without assuming a prior knowledge of the generating model, we show that our approximate information state model learns to predict the future trajectory of the HDV using only observations. Subsequently, we generate safe control policies for a CAV while merging with HDVs, demonstrating a spectrum of driving behaviors, from aggressive to conservative. We demonstrate the effectiveness of the proposed approach by performing numerical simulations.
Worst-Case Control and Learning Using Partial Observations Over an Infinite Time-Horizon
Mar 31, 2023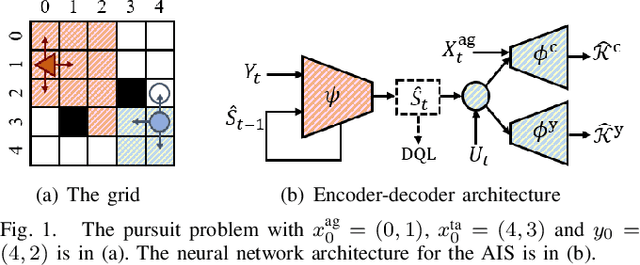
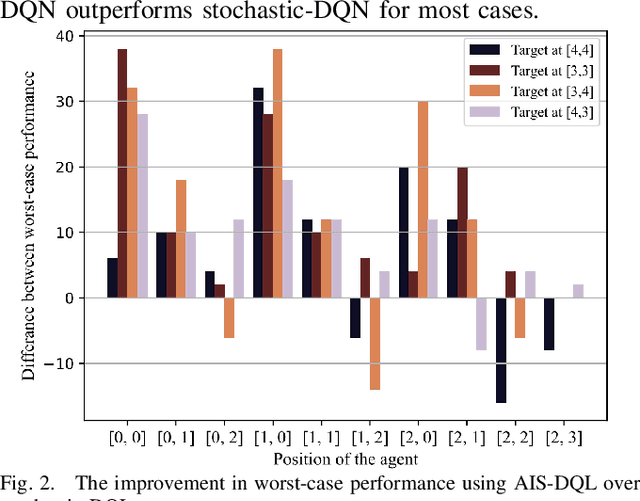
Safety-critical cyber-physical systems require control strategies whose worst-case performance is robust against adversarial disturbances and modeling uncertainties. In this paper, we present a framework for approximate control and learning in partially observed systems to minimize the worst-case discounted cost over an infinite time horizon. We model disturbances to the system as finite-valued uncertain variables with unknown probability distributions. For problems with known system dynamics, we construct a dynamic programming (DP) decomposition to compute the optimal control strategy. Our first contribution is to define information states that improve the computational tractability of this DP without loss of optimality. Then, we describe a simplification for a class of problems where the incurred cost is observable at each time instance. Our second contribution is defining an approximate information state that can be constructed or learned directly from observed data for problems with observable costs. We derive bounds on the performance loss of the resulting approximate control strategy and illustrate the effectiveness of our approach in partially observed decision-making problems with a numerical example.
Approximate Information States for Worst-Case Control and Learning in Uncertain Systems
Jan 12, 2023



In this paper, we investigate discrete-time decision-making problems in uncertain systems with partially observed states. We consider a non-stochastic model, where uncontrolled disturbances acting on the system take values in bounded sets with unknown distributions. We present a general framework for decision-making in such problems by developing the notions of information states and approximate information states. In our definition of an information state, we introduce conditions to identify for an uncertain variable sufficient to construct a dynamic program (DP) that computes an optimal strategy. We show that many information states from the literature on worst-case control actions, e.g., the conditional range, are examples of our more general definition. Next, we relax these conditions to define approximate information states using only output variables, which can be learned from output data without knowledge of system dynamics. We use this notion to formulate an approximate DP that yields a strategy with a bounded performance loss. Finally, we illustrate the application of our results in control and reinforcement learning using numerical examples.