 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Based Reinforcement Learning Under Confounding
Dec 08, 2025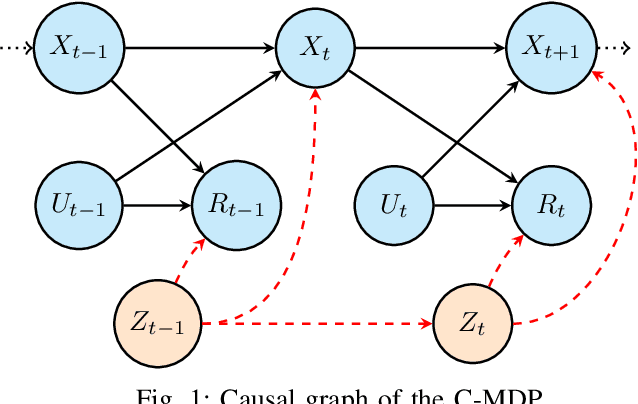
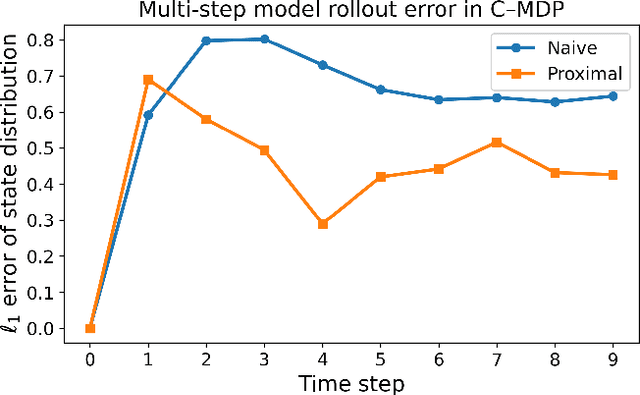
We investigate model-based reinforcement learning in contextual Markov decision processes (C-MDPs) in which the context is unobserved and induces confounding in the offline dataset. In such settings, conventional model-learning methods are fundamentally inconsistent, as the transition and reward mechanisms generated under a behavioral policy do not correspond to the interventional quantities required for evaluating a state-based policy. To address this issue, we adapt a proximal off-policy evaluation approach that identifies the confounded reward expectation using only observable state-action-reward trajectories under mild invertibility conditions on proxy variables. When combined with a behavior-averaged transition model, this construction yields a surrogate MDP whose Bellman operator is well defined and consistent for state-based policies, and which integrates seamlessly with the maximum causal entropy (MaxCausalEnt) model-learning framework. The proposed formulation enables principled model learning and planning in confounded environments where contextual information is unobserved, unavailable, or impractical to collect.
A Communication-Efficient Decentralized Actor-Critic Algorithm
Oct 22, 2025In this paper, we study the problem of reinforcement learning in multi-agent systems where communication among agents is limited. We develop a decentralized actor-critic learning framework in which each agent performs several local updates of its policy and value function, where the latter is approximated by a multi-layer neural network, before exchanging information with its neighbors. This local training strategy substantially reduces the communication burden while maintaining coordination across the network. We establish finite-time convergence analysis for the algorithm under Markov-sampling. Specifically, to attain the $\varepsilon$-accurate stationary point, the sample complexity is of order $\mathcal{O}(\varepsilon^{-3})$ and the communication complexity is of order $\mathcal{O}(\varepsilon^{-1}\tau^{-1})$, where tau denotes the number of local training steps. We also show how the final error bound depends on the neural network's approximation quality. Numerical experiments in a cooperative control setting illustrate and validate the theoretical findings.
VisioPath: Vision-Language Enhanced Model Predictive Control for Safe Autonomous Navigation in Mixed Traffic
Jul 08, 2025In this paper, we introduce VisioPath, a novel framework combining vision-language models (VLMs) with model predictive control (MPC) to enable safe autonomous driving in dynamic traffic environments. The proposed approach leverages a bird's-eye view video processing pipeline and zero-shot VLM capabilities to obtain structured information about surrounding vehicles, including their positions, dimensions, and velocities. Using this rich perception output, we construct elliptical collision-avoidance potential fields around other traffic participants, which are seamlessly integrated into a finite-horizon optimal control problem for trajectory planning. The resulting trajectory optimization is solved via differential dynamic programming with an adaptive regularization scheme and is embedded in an event-triggered MPC loop. To ensure collision-free motion, a safety verification layer is incorporated in the framework that provides an assessment of potential unsafe trajectories. Extensive simulations in Simulation of Urban Mobility (SUMO) demonstrate that VisioPath outperforms conventional MPC baselines across multiple metrics. By combining modern AI-driven perception with the rigorous foundation of optimal control, VisioPath represents a significant step forward in safe trajectory planning for complex traffic systems.
AI Recommendation Systems for Lane-Changing Using Adherence-Aware Reinforcement Learning
Apr 28, 2025



In this paper, we present an adherence-aware reinforcement learning (RL) approach aimed at seeking optimal lane-changing recommendations within a semi-autonomous driving environment to enhance a single vehicle's travel efficiency. The problem is framed within a Markov decision process setting and is addressed through an adherence-aware deep Q network, which takes into account the partial compliance of human drivers with the recommended actions. This approach is evaluated within CARLA's driving environment under realistic scenarios.
Off-Policy Evaluation for Sequential Persuasion Process with Unobserved Confounding
Apr 01, 2025



In this paper, we expand the Bayesian persuasion framework to account for unobserved confounding variables in sender-receiver interactions. While traditional models assume that belief updates follow Bayesian principles, real-world scenarios often involve hidden variables that impact the receiver's belief formation and decision-making. We conceptualize this as a sequential decision-making problem, where the sender and receiver interact over multiple rounds. In each round, the sender communicates with the receiver, who also interacts with the environment. Crucially, the receiver's belief update is affected by an unobserved confounding variable. By reformulating this scenario as a Partially Observable Markov Decision Process (POMDP), we capture the sender's incomplete information regarding both the dynamics of the receiver's beliefs and the unobserved confounder. We prove that finding an optimal observation-based policy in this POMDP is equivalent to solving for an optimal signaling strategy in the original persuasion framework. Furthermore, we demonstrate how this reformulation facilitates the application of proximal learning for off-policy evaluation in the persuasion process. This advancement enables the sender to evaluate alternative signaling strategies using only observational data from a behavioral policy, thus eliminating the necessity for costly new experiments.
CorrA: Leveraging Large Language Models for Dynamic Obstacle Avoidance of Autonomous Vehicles
Mar 03, 2025



In this paper, we present Corridor-Agent (CorrA), a framework that integrates large language models (LLMs) with model predictive control (MPC) to address the challenges of dynamic obstacle avoidance in autonomous vehicles. Our approach leverages LLM reasoning ability to generate appropriate parameters for sigmoid-based boundary functions that define safe corridors around obstacles, effectively reducing the state-space of the controlled vehicle. The proposed framework adjusts these boundaries dynamically based on real-time vehicle data that guarantees collision-free trajectories while also ensuring both computational efficiency and trajectory optimality. The problem is formulated as an optimal control problem and solved with differential dynamic programming (DDP) for constrained optimization, and the proposed approach is embedded within an MPC framework. Extensive simulation and real-world experiments demonstrate that the proposed framework achieves superior performance in maintaining safety and efficiency in complex, dynamic environments compared to a baseline MPC approach.
Safe Merging in Mixed Traffic with Confidence
Mar 09, 2024In this letter, we present an approach for learning human driving behavior, without relying on specific model structures or prior distributions, in a mixed-traffic environment where connected and automated vehicles (CAVs) coexist with human-driven vehicles (HDVs). We employ conformal prediction to obtain theoretical safety guarantees and use real-world traffic data to validate our approach. Then, we design a controller that ensures effective merging of CAVs with HDVs with safety guarantees. We provide numerical simulations to illustrate the efficacy of the control approach.
A Framework for Effective AI Recommendations in Cyber-Physical-Human Systems
Mar 08, 2024Many cyber-physical-human systems (CPHS) involve a human decision-maker who may receive recommendations from an artificial intelligence (AI) platform while holding the ultimate responsibility of making decisions. In such CPHS applications, the human decision-maker may depart from an optimal recommended decision and instead implement a different one for various reasons. In this letter, we develop a rigorous framework to overcome this challenge. In our framework, we consider that humans may deviate from AI recommendations as they perceive and interpret the system's state in a different way than the AI platform. We establish the structural properties of optimal recommendation strategies and develop an approximate human model (AHM) used by the AI. We provide theoretical bounds on the optimality gap that arises from an AHM and illustrate the efficacy of our results in a numerical example.
Multi-Robot Cooperative Navigation in Crowds: A Game-Theoretic Learning-Based Model Predictive Control Approach
Oct 10, 2023



In this paper, we develop a control framework for the coordination of multiple robots as they navigate through crowded environments. Our framework comprises of a local model predictive control (MPC) for each robot and a social long short-term memory model that forecasts pedestrians' trajectories. We formulate the local MPC formulation for each individual robot that includes both individual and shared objectives, in which the latter encourages the emergence of coordination among robots. Next, we consider the multi-robot navigation and human-robot interaction, respectively, as a potential game and a two-player game, then employ an iterative best response approach to solve the resulting optimization problems in a centralized and distributed fashion. Finally, we demonstrate the effectiveness of coordination among robots in simulated crowd navigation.
A Q-learning Approach for Adherence-Aware Recommendations
Sep 12, 2023



In many real-world scenarios involving high-stakes and safety implications, a human decision-maker (HDM) may receive recommendations from an artificial intelligence while holding the ultimate responsibility of making decisions. In this letter, we develop an "adherence-aware Q-learning" algorithm to address this problem. The algorithm learns the "adherence level" that captures the frequency with which an HDM follows the recommended actions and derives the best recommendation policy in real time. We prove the convergence of the proposed Q-learning algorithm to the optimal value and evaluate its performance across various scenarios.