 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimality-Informed Neural Networks for Solving Parametric Optimization Problems
Dec 23, 2025Many engineering tasks require solving families of nonlinear constrained optimization problems, parametrized in setting-specific variables. This is computationally demanding, particularly, if solutions have to be computed across strongly varying parameter values, e.g., in real-time control or for model-based design. Thus, we propose to learn the mapping from parameters to the primal optimal solutions and to their corresponding duals using neural networks, giving a dense estimation in contrast to gridded approaches. Our approach, Optimality-informed Neural Networks (OptINNs), combines (i) a KKT-residual loss that penalizes violations of the first-order optimality conditions under standard constraint qualifications assumptions, and (ii) problem-specific output activations that enforce simple inequality constraints (e.g., box-type/positivity) by construction. This design reduces data requirements, allows the prediction of dual variables, and improves feasibility and closeness to optimality compared to penalty-only training. Taking quadratic penalties as a baseline, since this approach has been previously proposed for the considered problem class in literature, our method simplifies hyperparameter tuning and attains tighter adherence to optimality conditions. We evaluate OptINNs on different nonlinear optimization problems ranging from low to high dimensions. On small problems, OptINNs match a quadratic-penalty baseline in primal accuracy while additionally predicting dual variables with low error. On larger problems, OptINNs achieve lower constraint violations and lower primal error compared to neural networks based on the quadratic-penalty method. These results suggest that embedding feasibility and optimality into the network architecture and loss can make learning-based surrogates more accurate, feasible, and data-efficient for parametric optimization.
Efficient Collision-Avoidance Constraints for Ellipsoidal Obstacles in Optimal Control: Application to Path-Following MPC and UAVs
Oct 30, 2025This article proposes a modular optimal control framework for local three-dimensional ellipsoidal obstacle avoidance, exemplarily applied to model predictive path-following control. Static as well as moving obstacles are considered. Central to the approach is a computationally efficient and continuously differentiable condition for detecting collisions with ellipsoidal obstacles. A novel two-stage optimization approach mitigates numerical issues arising from the structure of the resulting optimal control problem. The effectiveness of the approach is demonstrated through simulations and real-world experiments with the Crazyflie quadrotor. This represents the first hardware demonstration of an MPC controller of this kind for UAVs in a three-dimensional task.
Neural network-enhanced integrators for simulating ordinary differential equations
Apr 07, 2025Numerous applications necessitate the computation of numerical solutions to differential equations across a wide range of initial conditions and system parameters, which feeds the demand for efficient yet accurate numerical integration methods.This study proposes a neural network (NN) enhancement of classical numerical integrators. NNs are trained to learn integration errors, which are then used as additive correction terms in numerical schemes. The performance of these enhanced integrators is compared with well-established methods through numerical studies, with a particular emphasis on computational efficiency. Analytical properties are examined in terms of local errors and backward error analysis. Embedded Runge-Kutta schemes are then employed to develop enhanced integrators that mitigate generalization risk, ensuring that the neural network's evaluation in previously unseen regions of the state space does not destabilize the integrator. It is guaranteed that the enhanced integrators perform at least as well as the desired classical Runge-Kutta schemes. The effectiveness of the proposed approaches is demonstrated through extensive numerical studies using a realistic model of a wind turbine, with parameters derived from the established simulation framework OpenFast.
Efficient Avoidance of Ellipsoidal Obstacles with Model Predictive Control for Mobile Robots and Vehicles
Dec 16, 2024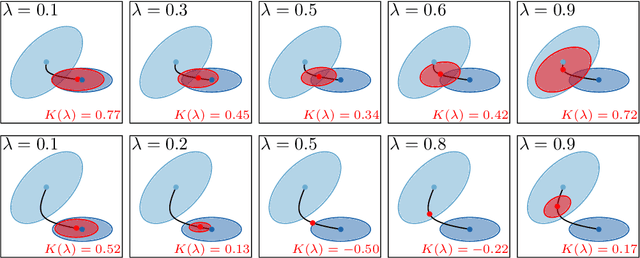
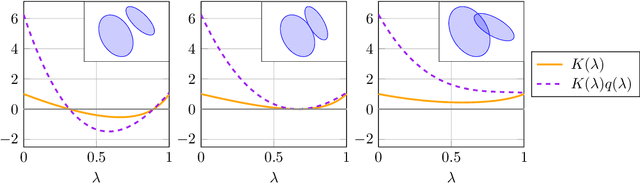
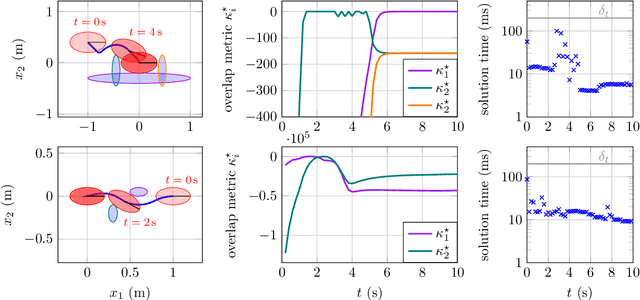

In real-world applications of mobile robots, collision avoidance is of critical importance. Typically, global motion planning in constrained environments is addressed through high-level control schemes. However, additionally integrating local collision avoidance into robot motion control offers significant advantages. For instance, it reduces the reliance on heuristics and conservatism that can arise from a two-stage approach separating local collision avoidance and control. Moreover, using model predictive control (MPC), a robot's full potential can be harnessed by considering jointly local collision avoidance, the robot's dynamics, and actuation constraints. In this context, the present paper focuses on obstacle avoidance for wheeled mobile robots, where both the robot's and obstacles' occupied volumes are modeled as ellipsoids. To this end, a computationally efficient overlap test, that works for arbitrary ellipsoids, is conducted and novelly integrated into the MPC framework. We propose a particularly efficient implementation tailored to robots moving in the plane. The functionality of the proposed obstacle-avoiding MPC is demonstrated for two exemplary types of kinematics by means of simulations. A hardware experiment using a real-world wheeled mobile robot shows transferability to reality and real-time applicability. The general computational approach to ellipsoidal obstacle avoidance can also be applied to other robotic systems and vehicles as well as three-dimensional scenarios.
The impact of AI on engineering design procedures for dynamical systems
Dec 16, 2024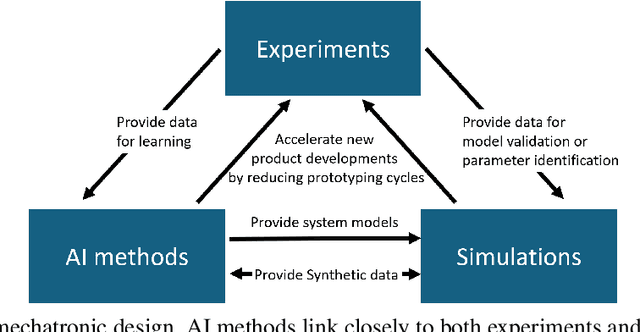



Artificial intelligence (AI) is driving transformative changes across numerous fields, revolutionizing conventional processes and creating new opportunities for innovation. The development of mechatronic systems is undergoing a similar transformation. Over the past decade, modeling, simulation, and optimization techniques have become integral to the design process, paving the way for the adoption of AI-based methods. In this paper, we examine the potential for integrating AI into the engineering design process, using the V-model from the VDI guideline 2206, considered the state-of-the-art in product design, as a foundation. We identify and classify AI methods based on their suitability for specific stages within the engineering product design workflow. Furthermore, we present a series of application examples where AI-assisted design has been successfully implemented by the authors. These examples, drawn from research projects within the DFG Priority Program \emph{SPP~2353: Daring More Intelligence - Design Assistants in Mechanics and Dynamics}, showcase a diverse range of applications across mechanics and mechatronics, including areas such as acoustics and robotics.
The Indirect Method for Generating Libraries of Optimal Periodic Trajectories and Its Application to Economical Bipedal Walking
Oct 12, 2024Trajectory optimization is an essential tool for generating efficient and dynamically consistent gaits in legged locomotion. This paper explores the indirect method of trajectory optimization, emphasizing its application in creating optimal periodic gaits for legged systems and contrasting it with the more commonly used direct method. While the direct method provides considerable flexibility in its implementation, it is limited by its input space parameterization. In contrast, the indirect method improves accuracy by defining control inputs as functions of the system's states and costates. We tackle the convergence challenges associated with indirect shooting methods, particularly through the systematic development of gait libraries by utilizing numerical continuation methods. Our contributions include: (1) the formalization of a general periodic trajectory optimization problem that extends existing first-order necessary conditions for a broader range of cost functions and operating conditions; (2) a methodology for efficiently generating libraries of optimal trajectories (gaits) utilizing a single shooting approach combined with numerical continuation methods, including a novel approach for reconstructing Lagrange multipliers and costates from passive gaits; and (3) a comparative analysis of the indirect and direct shooting methods using a compass-gait walker as a case study, demonstrating the former's superior accuracy in generating optimal gaits. The findings underscore the potential of the indirect method for generating families of optimal gaits, thereby advancing the field of trajectory optimization in legged robotics.
An iterative closest point algorithm for marker-free 3D shape registration of continuum robots
May 24, 2024Continuum robots have emerged as a promising technology in the medical field due to their potential of accessing deep sited locations of the human body with low surgical trauma. When deriving physics-based models for these robots, evaluating the models poses a significant challenge due to the difficulty in accurately measuring their intricate shapes. In this work, we present an optimization based 3D shape registration algorithm for estimation of the backbone shape of slender continuum robots as part of a pho togrammetric measurement. Our approach to estimating the backbones optimally matches a parametric three-dimensional curve to images of the robot. Since we incorporate an iterative closest point algorithm into our method, we do not need prior knowledge of the robots position within the respective images. In our experiments with artificial and real images of a concentric tube continuum robot, we found an average maximum deviation of the reconstruction from simulation data of 0.665 mm and 0.939 mm from manual measurements. These results show that our algorithm is well capable of producing high accuracy positional data from images of continuum robots.
Optimization-based motion primitive automata for autonomous driving
Jan 25, 2024Trajectory planning for autonomous cars can be addressed by primitive-based methods, which encode nonlinear dynamical system behavior into automata. In this paper, we focus on optimal trajectory planning. Since, typically, multiple criteria have to be taken into account, multiobjective optimization problems have to be solved. For the resulting Pareto-optimal motion primitives, we introduce a universal automaton, which can be reduced or reconfigured according to prioritized criteria during planning. We evaluate a corresponding multi-vehicle planning scenario with both simulations and laboratory experiments.
Hamiltonian Neural Networks with Automatic Symmetry Detection
Jan 19, 2023



Recently, Hamiltonian neural networks (HNN) have been introduced to incorporate prior physical knowledge when learning the dynamical equations of Hamiltonian systems. Hereby, the symplectic system structure is preserved despite the data-driven modeling approach. However, preserving symmetries requires additional attention. In this research, we enhance the HNN with a Lie algebra framework to detect and embed symmetries in the neural network. This approach allows to simultaneously learn the symmetry group action and the total energy of the system. As illustrating examples, a pendulum on a cart and a two-body problem from astrodynamics are considered.
Path Planning for Concentric Tube Robots: a Toolchain with Application to Stereotactic Neurosurgery
Nov 28, 2022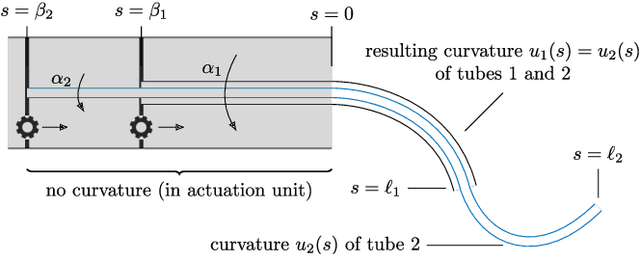
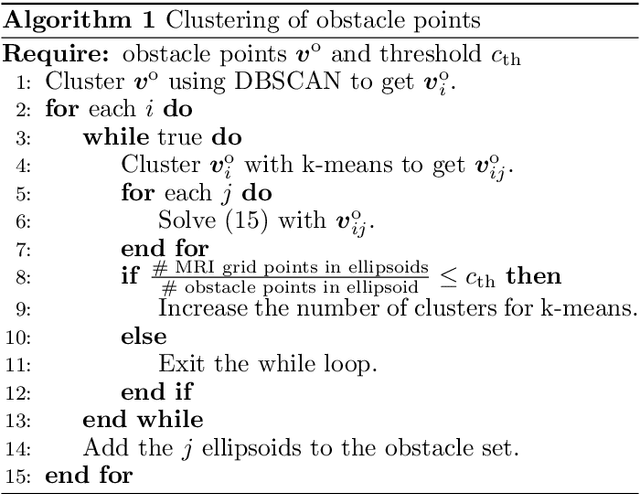
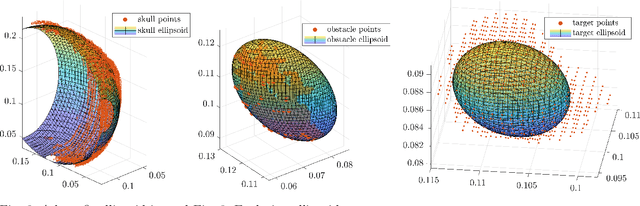
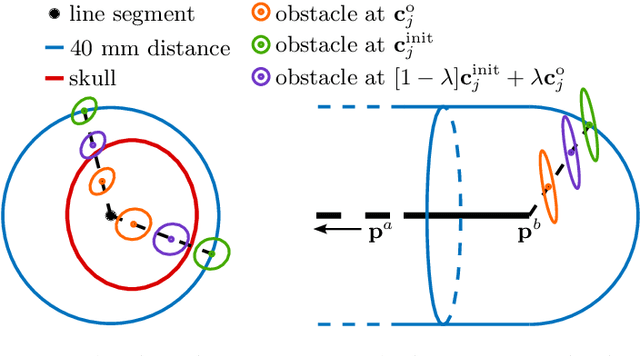
We present a toolchain for solving path planning problems for concentric tube robots through obstacle fields. First, ellipsoidal sets representing the target area and obstacles are constructed from labelled point clouds. Then, the nonlinear and highly nonconvex optimal control problem is solved by introducing a homotopy on the obstacle positions where at one extreme of the parameter the obstacles are removed from the operating space, and at the other extreme they are located at their intended positions. We present a detailed example (with more than a thousand obstacles) from stereotactic neurosurgery with real-world data obtained from labelled MPRI scans.