 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimality-Informed Neural Networks for Solving Parametric Optimization Problems
Dec 23, 2025Many engineering tasks require solving families of nonlinear constrained optimization problems, parametrized in setting-specific variables. This is computationally demanding, particularly, if solutions have to be computed across strongly varying parameter values, e.g., in real-time control or for model-based design. Thus, we propose to learn the mapping from parameters to the primal optimal solutions and to their corresponding duals using neural networks, giving a dense estimation in contrast to gridded approaches. Our approach, Optimality-informed Neural Networks (OptINNs), combines (i) a KKT-residual loss that penalizes violations of the first-order optimality conditions under standard constraint qualifications assumptions, and (ii) problem-specific output activations that enforce simple inequality constraints (e.g., box-type/positivity) by construction. This design reduces data requirements, allows the prediction of dual variables, and improves feasibility and closeness to optimality compared to penalty-only training. Taking quadratic penalties as a baseline, since this approach has been previously proposed for the considered problem class in literature, our method simplifies hyperparameter tuning and attains tighter adherence to optimality conditions. We evaluate OptINNs on different nonlinear optimization problems ranging from low to high dimensions. On small problems, OptINNs match a quadratic-penalty baseline in primal accuracy while additionally predicting dual variables with low error. On larger problems, OptINNs achieve lower constraint violations and lower primal error compared to neural networks based on the quadratic-penalty method. These results suggest that embedding feasibility and optimality into the network architecture and loss can make learning-based surrogates more accurate, feasible, and data-efficient for parametric optimization.
An iterative closest point algorithm for marker-free 3D shape registration of continuum robots
May 24, 2024Continuum robots have emerged as a promising technology in the medical field due to their potential of accessing deep sited locations of the human body with low surgical trauma. When deriving physics-based models for these robots, evaluating the models poses a significant challenge due to the difficulty in accurately measuring their intricate shapes. In this work, we present an optimization based 3D shape registration algorithm for estimation of the backbone shape of slender continuum robots as part of a pho togrammetric measurement. Our approach to estimating the backbones optimally matches a parametric three-dimensional curve to images of the robot. Since we incorporate an iterative closest point algorithm into our method, we do not need prior knowledge of the robots position within the respective images. In our experiments with artificial and real images of a concentric tube continuum robot, we found an average maximum deviation of the reconstruction from simulation data of 0.665 mm and 0.939 mm from manual measurements. These results show that our algorithm is well capable of producing high accuracy positional data from images of continuum robots.
Path Planning for Concentric Tube Robots: a Toolchain with Application to Stereotactic Neurosurgery
Nov 28, 2022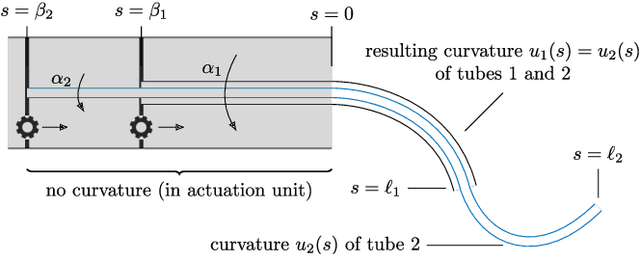
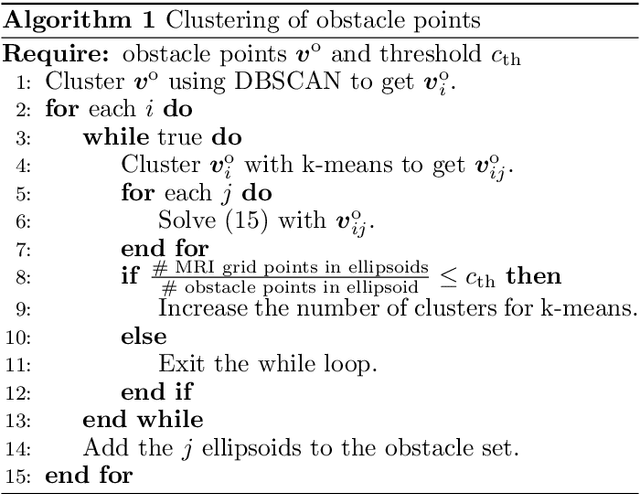
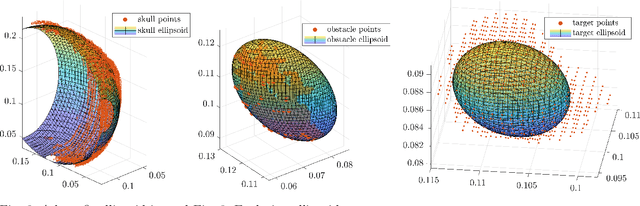
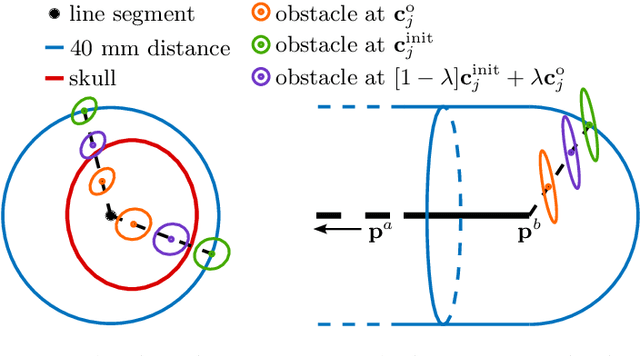
We present a toolchain for solving path planning problems for concentric tube robots through obstacle fields. First, ellipsoidal sets representing the target area and obstacles are constructed from labelled point clouds. Then, the nonlinear and highly nonconvex optimal control problem is solved by introducing a homotopy on the obstacle positions where at one extreme of the parameter the obstacles are removed from the operating space, and at the other extreme they are located at their intended positions. We present a detailed example (with more than a thousand obstacles) from stereotactic neurosurgery with real-world data obtained from labelled MPRI scans.