 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe impact of AI on engineering design procedures for dynamical systems
Dec 16, 2024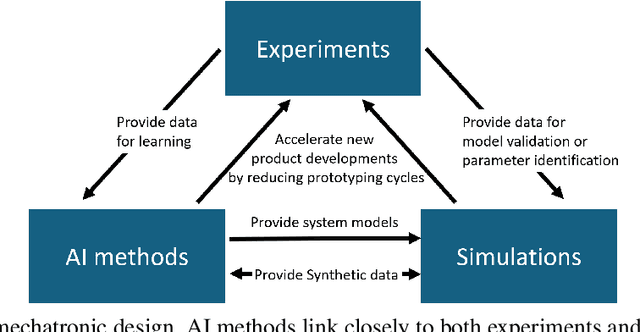



Artificial intelligence (AI) is driving transformative changes across numerous fields, revolutionizing conventional processes and creating new opportunities for innovation. The development of mechatronic systems is undergoing a similar transformation. Over the past decade, modeling, simulation, and optimization techniques have become integral to the design process, paving the way for the adoption of AI-based methods. In this paper, we examine the potential for integrating AI into the engineering design process, using the V-model from the VDI guideline 2206, considered the state-of-the-art in product design, as a foundation. We identify and classify AI methods based on their suitability for specific stages within the engineering product design workflow. Furthermore, we present a series of application examples where AI-assisted design has been successfully implemented by the authors. These examples, drawn from research projects within the DFG Priority Program \emph{SPP~2353: Daring More Intelligence - Design Assistants in Mechanics and Dynamics}, showcase a diverse range of applications across mechanics and mechatronics, including areas such as acoustics and robotics.
An iterative closest point algorithm for marker-free 3D shape registration of continuum robots
May 24, 2024Continuum robots have emerged as a promising technology in the medical field due to their potential of accessing deep sited locations of the human body with low surgical trauma. When deriving physics-based models for these robots, evaluating the models poses a significant challenge due to the difficulty in accurately measuring their intricate shapes. In this work, we present an optimization based 3D shape registration algorithm for estimation of the backbone shape of slender continuum robots as part of a pho togrammetric measurement. Our approach to estimating the backbones optimally matches a parametric three-dimensional curve to images of the robot. Since we incorporate an iterative closest point algorithm into our method, we do not need prior knowledge of the robots position within the respective images. In our experiments with artificial and real images of a concentric tube continuum robot, we found an average maximum deviation of the reconstruction from simulation data of 0.665 mm and 0.939 mm from manual measurements. These results show that our algorithm is well capable of producing high accuracy positional data from images of continuum robots.