 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-Accelerated Optimization-based Trajectory Planning for Cooperative Aerial-Ground Handover Missions
May 19, 2026This paper presents a learning-augmented trajectory planning framework for cooperative unmanned aerial vehicle (UAV) and unmanned ground vehicle (UGV) handover missions. While centralized trajectory optimization ensures dynamic feasibility and task optimality, its high computational cost limits real-time applicability. We propose a neural surrogate planner utilizing decoupled encoder-decoder long short-term memory (LSTM) networks to generate coordinated handover trajectory predictions from the task specifications. These predictions serve as informed warm starts for the downstream centralized optimizer, thereby accelerating convergence to dynamically feasible solutions. Benchmark evaluations demonstrate that the learning-augmented planning framework achieves more than a threefold speedup and 100% optimization success rate compared to cold start optimization. The results indicate that combining data-driven inference with model-based refinement enables fast and reliable trajectory generation for heterogeneous multi-robot systems.
Efficient Collision-Avoidance Constraints for Ellipsoidal Obstacles in Optimal Control: Application to Path-Following MPC and UAVs
Oct 30, 2025This article proposes a modular optimal control framework for local three-dimensional ellipsoidal obstacle avoidance, exemplarily applied to model predictive path-following control. Static as well as moving obstacles are considered. Central to the approach is a computationally efficient and continuously differentiable condition for detecting collisions with ellipsoidal obstacles. A novel two-stage optimization approach mitigates numerical issues arising from the structure of the resulting optimal control problem. The effectiveness of the approach is demonstrated through simulations and real-world experiments with the Crazyflie quadrotor. This represents the first hardware demonstration of an MPC controller of this kind for UAVs in a three-dimensional task.
Model Predictive Path-Following Control for a Quadrotor
Jun 18, 2025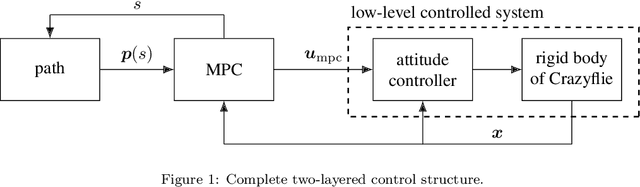
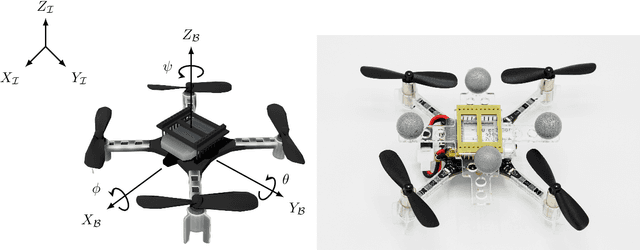
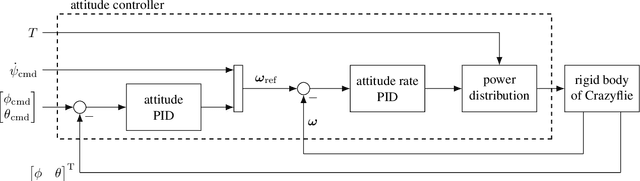
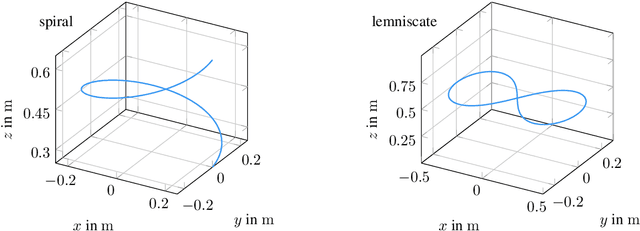
Automating drone-assisted processes is a complex task. Many solutions rely on trajectory generation and tracking, whereas in contrast, path-following control is a particularly promising approach, offering an intuitive and natural approach to automate tasks for drones and other vehicles. While different solutions to the path-following problem have been proposed, most of them lack the capability to explicitly handle state and input constraints, are formulated in a conservative two-stage approach, or are only applicable to linear systems. To address these challenges, the paper is built upon a Model Predictive Control-based path-following framework and extends its application to the Crazyflie quadrotor, which is investigated in hardware experiments. A cascaded control structure including an underlying attitude controller is included in the Model Predictive Path-Following Control formulation to meet the challenging real-time demands of quadrotor control. The effectiveness of the proposed method is demonstrated through real-world experiments, representing, to the best of the authors' knowledge, a novel application of this MPC-based path-following approach to the quadrotor. Additionally, as an extension to the original method, to allow for deviations of the path in cases where the precise following of the path might be overly restrictive, a corridor path-following approach is presented.
Discovering Antagonists in Networks of Systems: Robot Deployment
Feb 27, 2025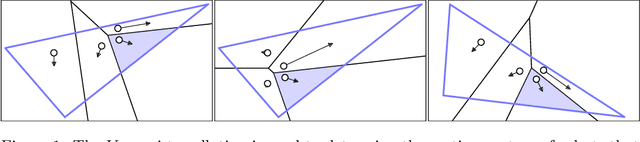
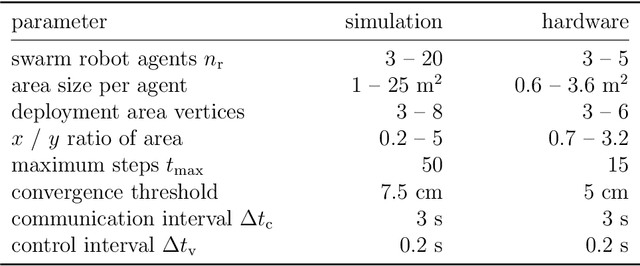
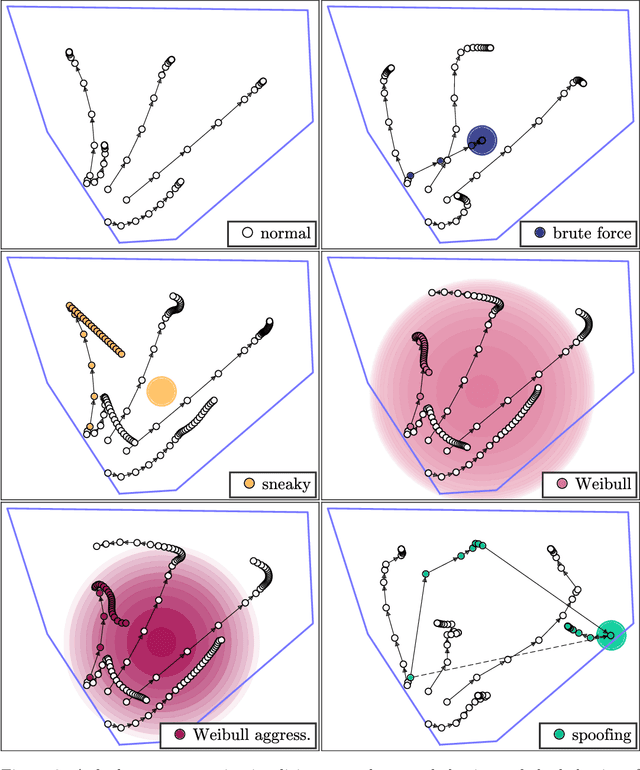
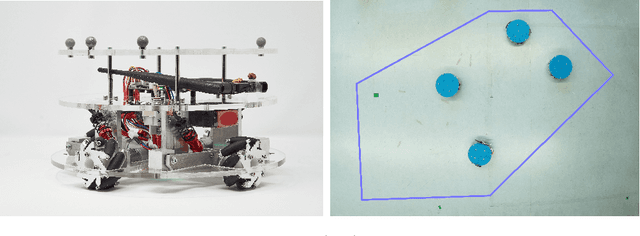
A contextual anomaly detection method is proposed and applied to the physical motions of a robot swarm executing a coverage task. Using simulations of a swarm's normal behavior, a normalizing flow is trained to predict the likelihood of a robot motion within the current context of its environment. During application, the predicted likelihood of the observed motions is used by a detection criterion that categorizes a robot agent as normal or antagonistic. The proposed method is evaluated on five different strategies of antagonistic behavior. Importantly, only readily available simulated data of normal robot behavior is used for training such that the nature of the anomalies need not be known beforehand. The best detection criterion correctly categorizes at least 80% of each antagonistic type while maintaining a false positive rate of less than 5% for normal robot agents. Additionally, the method is validated in hardware experiments, yielding results similar to the simulated scenarios. Compared to the state-of-the-art approach, both the predictive performance of the normalizing flow and the robustness of the detection criterion are increased.
An Online Optimization-Based Trajectory Planning Approach for Cooperative Landing Tasks
Feb 19, 2025This paper presents a real-time trajectory planning scheme for a heterogeneous multi-robot system (consisting of a quadrotor and a ground mobile robot) for a cooperative landing task, where the landing position, landing time, and coordination between the robots are determined autonomously under the consideration of feasibility and user specifications. The proposed framework leverages the potential of the complementarity constraint as a decision-maker and an indicator for diverse cooperative tasks and extends it to the collaborative landing scenario. In a potential application of the proposed methodology, a ground mobile robot may serve as a mobile charging station and coordinates in real-time with a quadrotor to be charged, facilitating a safe and efficient rendezvous and landing. We verified the generated trajectories in simulation and real-world applications, demonstrating the real-time capabilities of the proposed landing planning framework.
Experiments with Large Language Models on Retrieval-Augmented Generation for Closed-Source Simulation Software
Feb 06, 2025



Large Language Models (LLMs) are increasingly helpful in text generation, even writing code in programming languages based on user prompts written in natural language. They are even applied to generate simulation models for multibody systems from natural language. Research results suggest that LLMs surpass the mere replication of existing code examples, where some LLMs have been trained on an open-source multibody simulation code. However, for closed-source simulation software, such results are not to be expected as their ideas and concepts might differ from other publicly available ones. LLMs can hallucinate for knowledge-intensive tasks, such as model creation, which can lead to wrong responses. This is especially the case for the LLM unknown closed-source simulation software. The same applies to other internal knowledge kept private to protect intellectual property or data privacy. The Retrieval-Augmented Generation (RAG) approach might yield a solution for these knowledge-intensive tasks. This paper explores the application of RAG to closed-source simulation software and presents first experiments. After a brief introduction to LLMs, the RAG approach, and the simulation method applied by the close-source simulation software, several examples are provided to test LLMs' knowledge of the simulation software and the creation of simulation models using two RAG systems. The examples show promising results indicating the benefits of applying RAG systems to closed-source simulation software, helping to access their knowledge. Nevertheless, they also reveal gaps in the applied information and open questions for further research.
The impact of AI on engineering design procedures for dynamical systems
Dec 16, 2024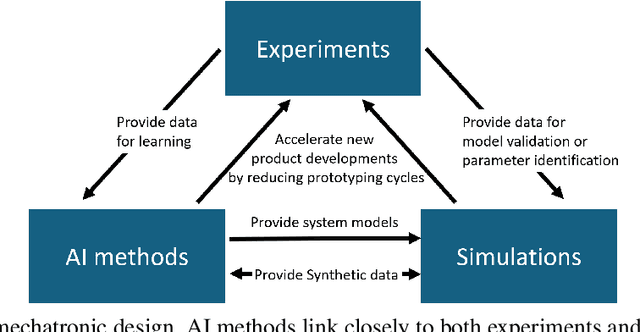



Artificial intelligence (AI) is driving transformative changes across numerous fields, revolutionizing conventional processes and creating new opportunities for innovation. The development of mechatronic systems is undergoing a similar transformation. Over the past decade, modeling, simulation, and optimization techniques have become integral to the design process, paving the way for the adoption of AI-based methods. In this paper, we examine the potential for integrating AI into the engineering design process, using the V-model from the VDI guideline 2206, considered the state-of-the-art in product design, as a foundation. We identify and classify AI methods based on their suitability for specific stages within the engineering product design workflow. Furthermore, we present a series of application examples where AI-assisted design has been successfully implemented by the authors. These examples, drawn from research projects within the DFG Priority Program \emph{SPP~2353: Daring More Intelligence - Design Assistants in Mechanics and Dynamics}, showcase a diverse range of applications across mechanics and mechatronics, including areas such as acoustics and robotics.
Efficient Avoidance of Ellipsoidal Obstacles with Model Predictive Control for Mobile Robots and Vehicles
Dec 16, 2024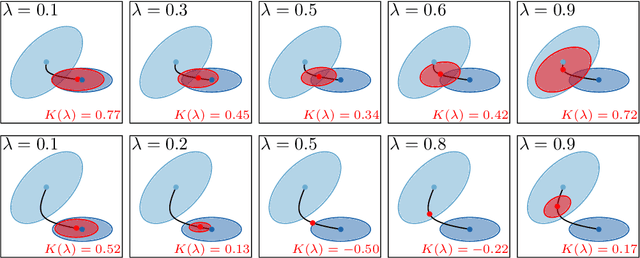
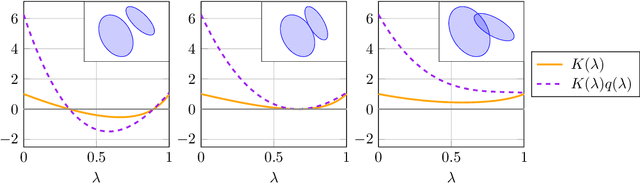
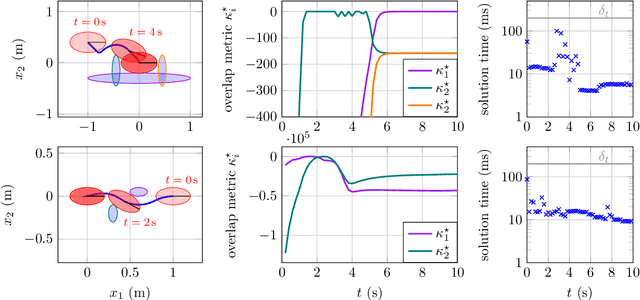

In real-world applications of mobile robots, collision avoidance is of critical importance. Typically, global motion planning in constrained environments is addressed through high-level control schemes. However, additionally integrating local collision avoidance into robot motion control offers significant advantages. For instance, it reduces the reliance on heuristics and conservatism that can arise from a two-stage approach separating local collision avoidance and control. Moreover, using model predictive control (MPC), a robot's full potential can be harnessed by considering jointly local collision avoidance, the robot's dynamics, and actuation constraints. In this context, the present paper focuses on obstacle avoidance for wheeled mobile robots, where both the robot's and obstacles' occupied volumes are modeled as ellipsoids. To this end, a computationally efficient overlap test, that works for arbitrary ellipsoids, is conducted and novelly integrated into the MPC framework. We propose a particularly efficient implementation tailored to robots moving in the plane. The functionality of the proposed obstacle-avoiding MPC is demonstrated for two exemplary types of kinematics by means of simulations. A hardware experiment using a real-world wheeled mobile robot shows transferability to reality and real-time applicability. The general computational approach to ellipsoidal obstacle avoidance can also be applied to other robotic systems and vehicles as well as three-dimensional scenarios.
Data-Driven Predictive Control of Nonholonomic Robots Based on a Bilinear Koopman Realization: Data Does Not Replace Geometry
Nov 11, 2024



Advances in machine learning and the growing trend towards effortless data generation in real-world systems has led to an increasing interest for data-inferred models and data-based control in robotics. It seems appealing to govern robots solely based on data, bypassing the traditional, more elaborate pipeline of system modeling through first-principles and subsequent controller design. One promising data-driven approach is the Extended Dynamic Mode Decomposition (EDMD) for control-affine systems, a system class which contains many vehicles and machines of immense practical importance including, e.g., typical wheeled mobile robots. EDMD can be highly data-efficient, computationally inexpensive, can deal with nonlinear dynamics as prevalent in robotics and mechanics, and has a sound theoretical foundation rooted in Koopman theory. On this background, this present paper examines how EDMD models can be integrated into predictive controllers for nonholonomic mobile robots. In addition to the conventional kinematic mobile robot, we also cover the complete data-driven control pipeline - from data acquisition to control design - when the robot is not treated in terms of first-order kinematics but in a second-order manner, allowing to account for actuator dynamics. Using only real-world measurement data, it is shown in both simulations and hardware experiments that the surrogate models enable high-precision predictive controllers in the studied cases. However, the findings raise significant concerns about purely data-centric approaches that overlook the underlying geometry of nonholonomic systems, showing that, for nonholonomic systems, some geometric insight seems necessary and cannot be easily compensated for with large amounts of data.
Cooperative Distributed MPC via Decentralized Real-Time Optimization: Implementation Results for Robot Formations
Jan 19, 2023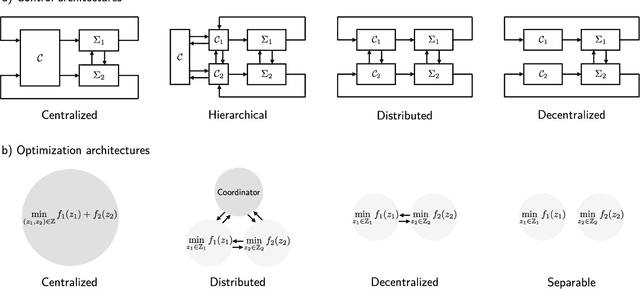
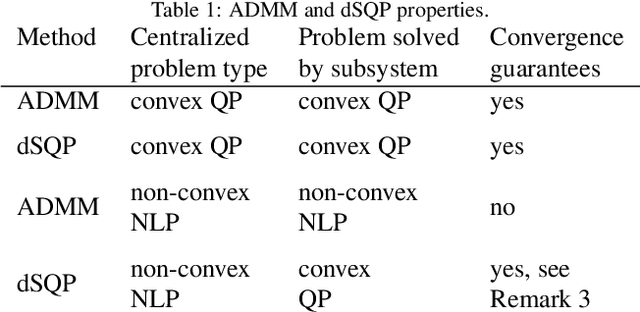
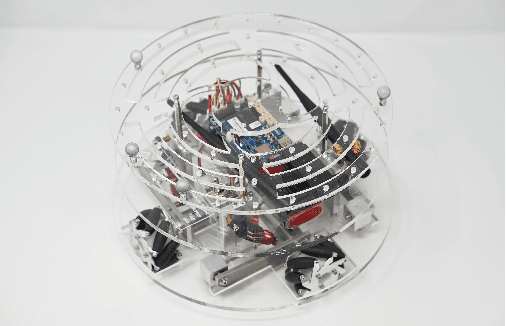
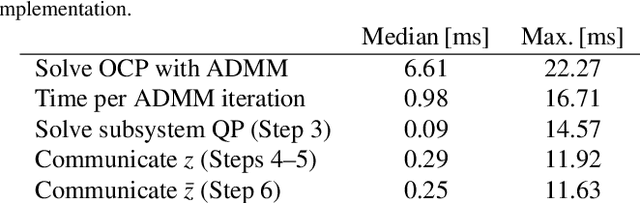
Distributed model predictive control (DMPC) is a flexible and scalable feedback control method applicable to a wide range of systems. While stability analysis of DMPC is quite well understood, there exist only limited implementation results for realistic applications involving distributed computation and networked communication. This article approaches formation control of mobile robots via a cooperative DMPC scheme. We discuss the implementation via decentralized optimization algorithms. To this end, we combine the alternating direction method of multipliers with decentralized sequential quadratic programming to solve the underlying optimal control problem in a decentralized fashion. Our approach only requires coupled subsystems to communicate and does not rely on a central coordinator. Our experimental results showcase the efficacy of DMPC for formation control and they demonstrate the real-time feasibility of the considered algorithms.