 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimization Strategies for Real-Time Control of an Autonomous Melting Probe
Paper and Code
Apr 17, 2018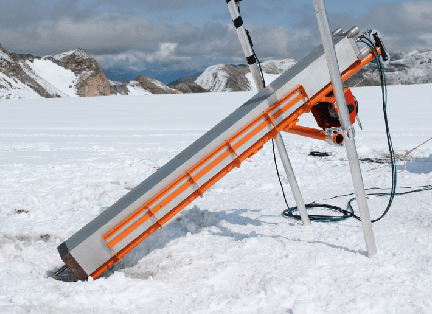
We present an optimization-based approach for trajectory planning and control of a maneuverable melting probe with a high number of binary control variables. The dynamics of the system are modeled by a set of ordinary differential equations with a priori knowledge of system parameters of the melting process. The original planning problem is handled as an optimal control problem. Then, optimal control is used for reference trajectory planning as well as in an MPC-like algorithm. Finally, to determine binary control variables, a MINLP fitting approach is presented. The proposed strategy has recently been tested during experiments on the Langenferner glacier. The data obtained is used for model improvement by means of automated parameter identification.