 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNetworked and Autonomous Model-scale Vehicles for Experiments in Research and Education
Paper and Code
Apr 17, 2020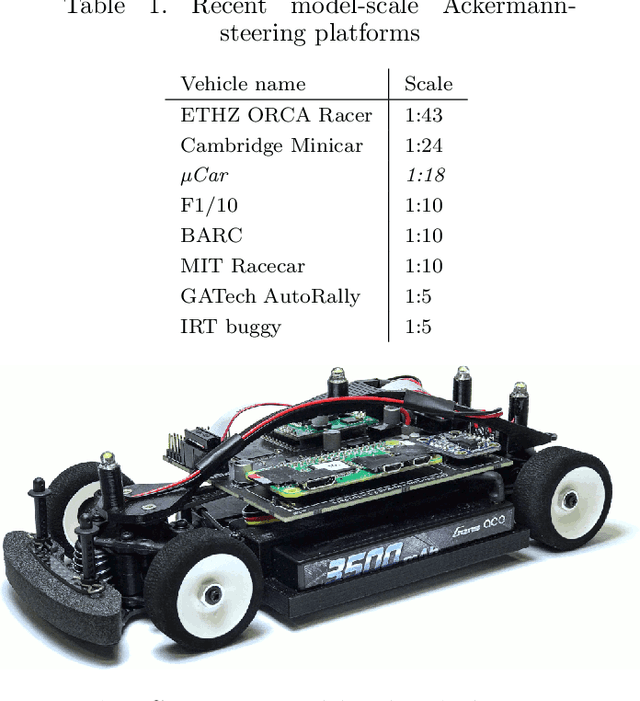
This paper presents the $\mathrm{\mu}$Car, a 1:18 model-scale vehicle with Ackermann steering geometry developed for experiments in networked and autonomous driving in research and education. The vehicle is open source, moderately costed and highly flexible, which allows for many applications. It is equipped with an inertial measurement unit and an odometer and obtains its pose via WLAN from an indoor positioning system. The two supported operating modes for controlling the vehicle are (1) computing control inputs on external hardware, transmitting them via WLAN and applying received inputs to the actuators and (2) transmitting a reference trajectory via WLAN, which is then followed by a controller running on the onboard Raspberry Pi Zero W. The design allows identical vehicles to be used at the same time in order to conduct experiments with a large amount of networked agents.