 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmall-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms: Challenges and a Roadmap
Mar 07, 2025This article proposes a roadmap to address the current challenges in small-scale testbeds for Connected and Automated Vehicles (CAVs) and robot swarms. The roadmap is a joint effort of participants in the workshop "1st Workshop on Small-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms," held on June 2 at the IEEE Intelligent Vehicles Symposium (IV) 2024 in Jeju, South Korea. The roadmap contains three parts: 1) enhancing accessibility and diversity, especially for underrepresented communities, 2) sharing best practices for the development and maintenance of testbeds, and 3) connecting testbeds through an abstraction layer to support collaboration. The workshop features eight invited speakers, four contributed papers [1]-[4], and a presentation of a survey paper on testbeds [5]. The survey paper provides an online comparative table of more than 25 testbeds, available at https://bassamlab.github.io/testbeds-survey. The workshop's own website is available at https://cpm-remote.lrt.unibwmuenchen.de/iv24-workshop.
Mixed Cloud Control Testbed: Validating Vehicle-Road-Cloud Integration via Mixed Digital Twin
Dec 05, 2022



Reliable and efficient validation technologies are critical for the recent development of multi-vehicle cooperation and vehicle-road-cloud integration. In this paper, we introduce our miniature experimental platform, Mixed Cloud Control Testbed (MCCT), developed based on a new notion of Mixed Digital Twin (mixedDT). Combining Mixed Reality with Digital Twin, mixedDT integrates the virtual and physical spaces into a mixed one, where physical entities coexist and interact with virtual entities via their digital counterparts. Under the framework of mixedDT, MCCT contains three major experimental platforms in the physical, virtual and mixed spaces respectively, and provides a unified access for various human-machine interfaces and external devices such as driving simulators. A cloud unit, where the mixed experimental platform is deployed, is responsible for fusing multi-platform information and assigning control instructions, contributing to synchronous operation and real-time cross-platform interaction. Particularly, MCCT allows for multi-vehicle coordination composed of different multi-source vehicles (\eg, physical vehicles, virtual vehicles and human-driven vehicles). Validations on vehicle platooning demonstrate the flexibility and scalability of MCCT.
Conflict-free Cooperation Method for Connected and Automated Vehicles at Unsignalized Intersections: Graph-based Modeling and Optimality Analysis
Jul 15, 2021
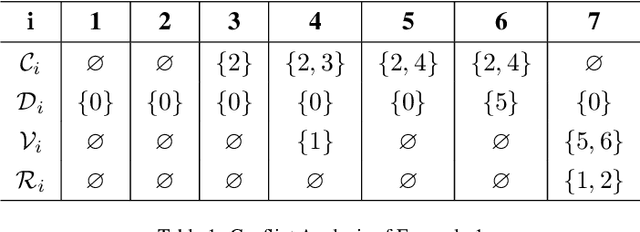
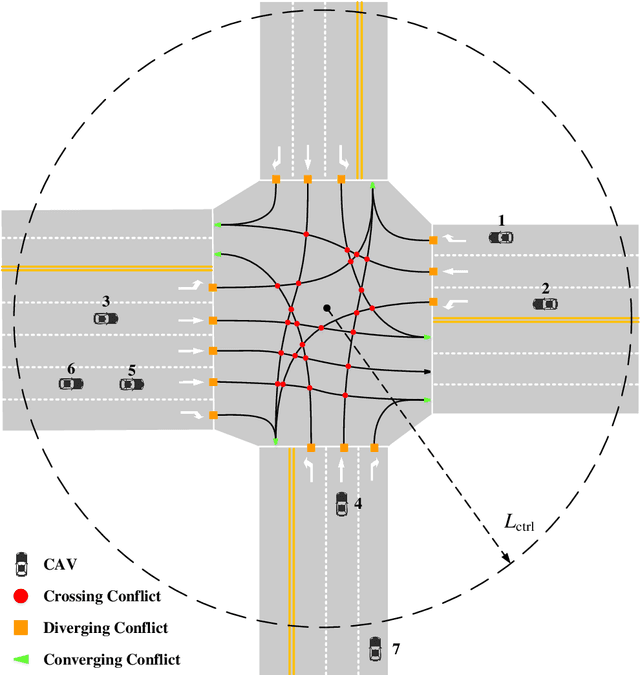

Connected and automated vehicles have shown great potential in improving traffic mobility and reducing emissions, especially at unsignalized intersections. Previous research has shown that vehicle passing order is the key influencing factor in improving intersection traffic mobility. In this paper, we propose a graph-based cooperation method to formalize the conflict-free scheduling problem at an unsignalized intersection. Based on graphical analysis, a vehicle's trajectory conflict relationship is modeled as a conflict directed graph and a coexisting undirected graph. Then, two graph-based methods are proposed to find the vehicle passing order. The first is an improved depth-first spanning tree algorithm, which aims to find the local optimal passing order vehicle by vehicle. The other novel method is a minimum clique cover algorithm, which identifies the global optimal solution. Finally, a distributed control framework and communication topology are presented to realize the conflict-free cooperation of vehicles. Extensive numerical simulations are conducted for various numbers of vehicles and traffic volumes, and the simulation results prove the effectiveness of the proposed algorithms.
Formation Control with Lane Preference for Connected and Automated Vehicles in Multi-lane Scenarios
Jun 18, 2021
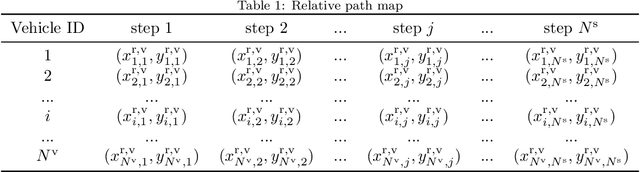
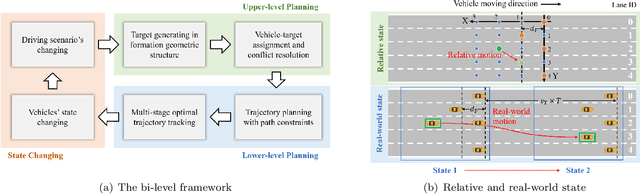
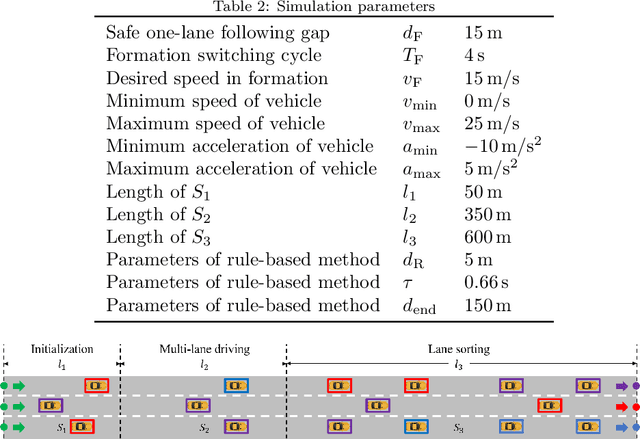
Multi-lane roads are typical scenarios in the real-world traffic system. Vehicles usually have preference on lanes according to their routes and destinations. Few of the existing studies looks into the problem of controlling vehicles to drive on their desired lanes. This paper proposes a formation control method that considers vehicles' preference on different lanes. The bi-level formation control framework is utilized to plan collision-free motion for vehicles, where relative target assignment and path planning are performed in the upper level, and trajectory planning and tracking are performed in the lower level. The collision-free multi-vehicle path planning problem considering lane preference is decoupled into two sub problems: calculating assignment list with non-decreasing cost and planning collision-free paths according to given assignment result. The Conflict-based Searching (CBS) method is utilized to plan collision-free paths for vehicles based on given assignment results. Case study is conducted and simulations are carried out in a three-lane road scenario. The results indicate that the proposed formation control method significantly reduces congestion and improves traffic efficiency at high traffic volumes, compared to the rule-based method.