 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormation Control with Lane Preference for Connected and Automated Vehicles in Multi-lane Scenarios
Jun 18, 2021
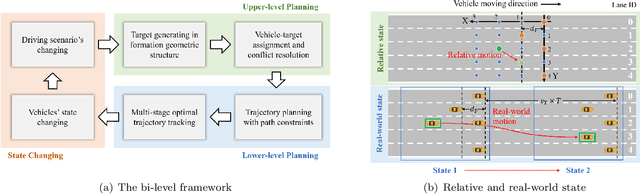
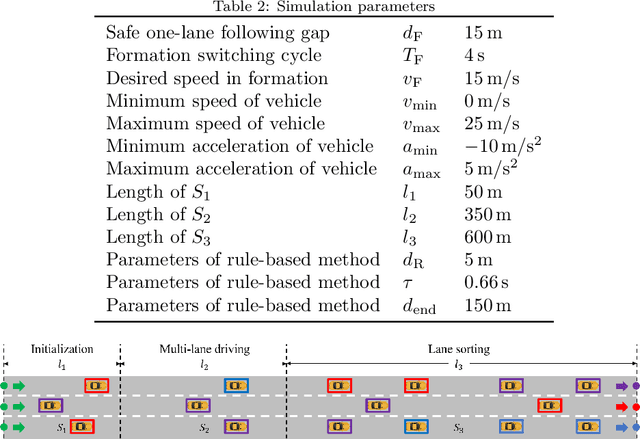
Multi-lane roads are typical scenarios in the real-world traffic system. Vehicles usually have preference on lanes according to their routes and destinations. Few of the existing studies looks into the problem of controlling vehicles to drive on their desired lanes. This paper proposes a formation control method that considers vehicles' preference on different lanes. The bi-level formation control framework is utilized to plan collision-free motion for vehicles, where relative target assignment and path planning are performed in the upper level, and trajectory planning and tracking are performed in the lower level. The collision-free multi-vehicle path planning problem considering lane preference is decoupled into two sub problems: calculating assignment list with non-decreasing cost and planning collision-free paths according to given assignment result. The Conflict-based Searching (CBS) method is utilized to plan collision-free paths for vehicles based on given assignment results. Case study is conducted and simulations are carried out in a three-lane road scenario. The results indicate that the proposed formation control method significantly reduces congestion and improves traffic efficiency at high traffic volumes, compared to the rule-based method.