 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Optimizable to Interactable: Mixed Digital Twin-Empowered Testing of Vehicle-Infrastructure Cooperation Systems
Mar 19, 2026Sufficient testing under corner cases is critical for the long-term operation of vehicle-infrastructure cooperation systems (VICS). However, existing corner-case generation methods are primarily AI-driven, and VICS testing under corner cases is typically limited to simulation. In this paper, we introduce an L5 ''Interactable'' level to the VICS digital twin (VICS-DT) taxonomy, extending beyond the conventional L4 ''Optimizable'' level. We further propose an L5-level VICS testing framework, IMPACT (Interactive Mixed-digital-twin Paradigm for Advanced Cooperative vehicle-infrastructure Testing). By enabling direct human interactions with VICS entities, IMPACT incorporates highly uncertain and unpredictable human behaviors into the testing loop, naturally generating high-quality corner cases that complement AI-based methods. Furthermore, the mixedDT-enabled ''Physical-Virtual Action Interaction'' facilitates safe VICS testing under corner cases, incorporating real-world environments and entities rather than purely in simulation. Finally, we implement IMPACT on the I-VIT (Interactive Vehicle-Infrastructure Testbed), and experiments demonstrate its effectiveness. The experimental videos are available at our project website: https://dongjh20.github.io/IMPACT.
Multi-Source Human-in-the-Loop Digital Twin Testbed for Connected and Autonomous Vehicles in Mixed Traffic Flow
Mar 18, 2026In the emerging mixed traffic environments, Connected and Autonomous Vehicles (CAVs) have to interact with surrounding human-driven vehicles (HDVs). This paper introduces MSH-MCCT (Multi-Source Human-in-the-Loop Mixed Cloud Control Testbed), a novel CAV testbed that captures complex interactions between various CAVs and HDVs. Utilizing the Mixed Digital Twin concept, which combines Mixed Reality with Digital Twin, MSH-MCCT integrates physical, virtual, and mixed platforms, along with multi-source control inputs. Bridged by the mixed platform, MSH-MCCT allows human drivers and CAV algorithms to operate both physical and virtual vehicles within multiple fields of view. Particularly, this testbed facilitates the coexistence and real-time interaction of physical and virtual CAVs \& HDVs, significantly enhancing the experimental flexibility and scalability. Experiments on vehicle platooning in mixed traffic showcase the potential of MSH-MCCT to conduct CAV testing with multi-source real human drivers in the loop through driving simulators of diverse fidelity. The videos for the experiments are available at our project website: https://dongjh20.github.io/MSH-MCCT.
Feature Map Convergence Evaluation for Functional Module
May 07, 2024

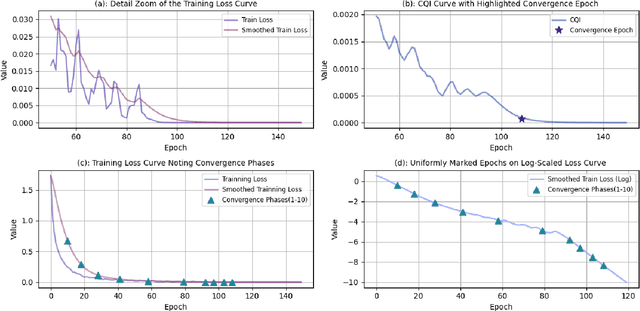
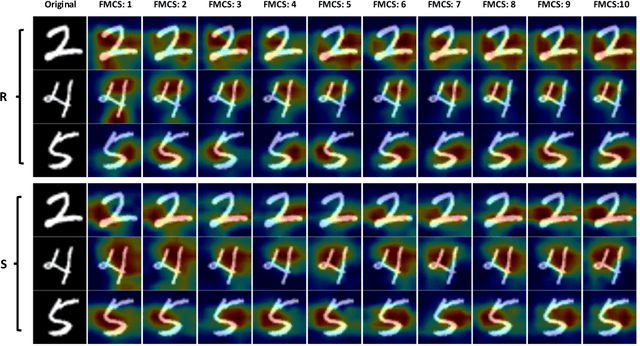
Autonomous driving perception models are typically composed of multiple functional modules that interact through complex relationships to accomplish environment understanding. However, perception models are predominantly optimized as a black box through end-to-end training, lacking independent evaluation of functional modules, which poses difficulties for interpretability and optimization. Pioneering in the issue, we propose an evaluation method based on feature map analysis to gauge the convergence of model, thereby assessing functional modules' training maturity. We construct a quantitative metric named as the Feature Map Convergence Score (FMCS) and develop Feature Map Convergence Evaluation Network (FMCE-Net) to measure and predict the convergence degree of models respectively. FMCE-Net achieves remarkable predictive accuracy for FMCS across multiple image classification experiments, validating the efficacy and robustness of the introduced approach. To the best of our knowledge, this is the first independent evaluation method for functional modules, offering a new paradigm for the training assessment towards perception models.
NeutronStream: A Dynamic GNN Training Framework with Sliding Window for Graph Streams
Dec 05, 2023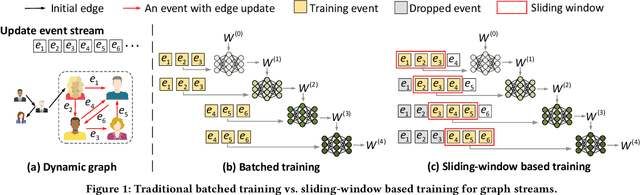
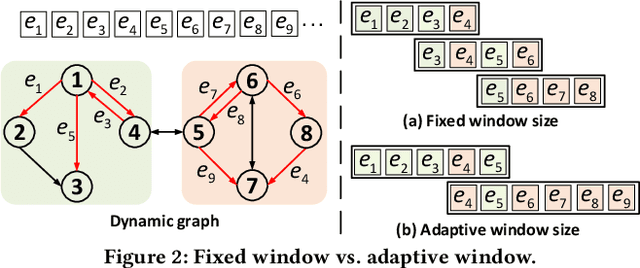
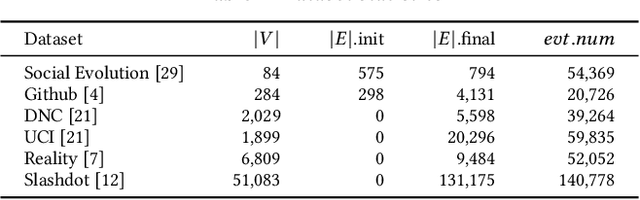
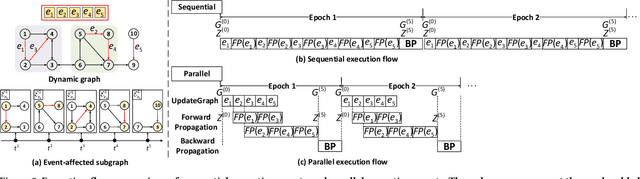
Existing Graph Neural Network (GNN) training frameworks have been designed to help developers easily create performant GNN implementations. However, most existing GNN frameworks assume that the input graphs are static, but ignore that most real-world graphs are constantly evolving. Though many dynamic GNN models have emerged to learn from evolving graphs, the training process of these dynamic GNNs is dramatically different from traditional GNNs in that it captures both the spatial and temporal dependencies of graph updates. This poses new challenges for designing dynamic GNN training frameworks. First, the traditional batched training method fails to capture real-time structural evolution information. Second, the time-dependent nature makes parallel training hard to design. Third, it lacks system supports for users to efficiently implement dynamic GNNs. In this paper, we present NeutronStream, a framework for training dynamic GNN models. NeutronStream abstracts the input dynamic graph into a chronologically updated stream of events and processes the stream with an optimized sliding window to incrementally capture the spatial-temporal dependencies of events. Furthermore, NeutronStream provides a parallel execution engine to tackle the sequential event processing challenge to achieve high performance. NeutronStream also integrates a built-in graph storage structure that supports dynamic updates and provides a set of easy-to-use APIs that allow users to express their dynamic GNNs. Our experimental results demonstrate that, compared to state-of-the-art dynamic GNN implementations, NeutronStream achieves speedups ranging from 1.48X to 5.87X and an average accuracy improvement of 3.97%.
Comprehensive Evaluation of GNN Training Systems: A Data Management Perspective
Nov 22, 2023Many Graph Neural Network (GNN) training systems have emerged recently to support efficient GNN training. Since GNNs embody complex data dependencies between training samples, the training of GNNs should address distinct challenges different from DNN training in data management, such as data partitioning, batch preparation for mini-batch training, and data transferring between CPUs and GPUs. These factors, which take up a large proportion of training time, make data management in GNN training more significant. This paper reviews GNN training from a data management perspective and provides a comprehensive analysis and evaluation of the representative approaches. We conduct extensive experiments on various benchmark datasets and show many interesting and valuable results. We also provide some practical tips learned from these experiments, which are helpful for designing GNN training systems in the future.
NeutronOrch: Rethinking Sample-based GNN Training under CPU-GPU Heterogeneous Environments
Nov 22, 2023Graph Neural Networks (GNNs) have demonstrated outstanding performance in various applications. Existing frameworks utilize CPU-GPU heterogeneous environments to train GNN models and integrate mini-batch and sampling techniques to overcome the GPU memory limitation. In CPU-GPU heterogeneous environments, we can divide sample-based GNN training into three steps: sample, gather, and train. Existing GNN systems use different task orchestrating methods to employ each step on CPU or GPU. After extensive experiments and analysis, we find that existing task orchestrating methods fail to fully utilize the heterogeneous resources, limited by inefficient CPU processing or GPU resource contention. In this paper, we propose NeutronOrch, a system for sample-based GNN training that incorporates a layer-based task orchestrating method and ensures balanced utilization of the CPU and GPU. NeutronOrch decouples the training process by layer and pushes down the training task of the bottom layer to the CPU. This significantly reduces the computational load and memory footprint of GPU training. To avoid inefficient CPU processing, NeutronOrch only offloads the training of frequently accessed vertices to the CPU and lets GPU reuse their embeddings with bounded staleness. Furthermore, NeutronOrch provides a fine-grained pipeline design for the layer-based task orchestrating method, fully overlapping different tasks on heterogeneous resources while strictly guaranteeing bounded staleness. The experimental results show that compared with the state-of-the-art GNN systems, NeutronOrch can achieve up to 4.61x performance speedup.
Mixed Cloud Control Testbed: Validating Vehicle-Road-Cloud Integration via Mixed Digital Twin
Dec 05, 2022



Reliable and efficient validation technologies are critical for the recent development of multi-vehicle cooperation and vehicle-road-cloud integration. In this paper, we introduce our miniature experimental platform, Mixed Cloud Control Testbed (MCCT), developed based on a new notion of Mixed Digital Twin (mixedDT). Combining Mixed Reality with Digital Twin, mixedDT integrates the virtual and physical spaces into a mixed one, where physical entities coexist and interact with virtual entities via their digital counterparts. Under the framework of mixedDT, MCCT contains three major experimental platforms in the physical, virtual and mixed spaces respectively, and provides a unified access for various human-machine interfaces and external devices such as driving simulators. A cloud unit, where the mixed experimental platform is deployed, is responsible for fusing multi-platform information and assigning control instructions, contributing to synchronous operation and real-time cross-platform interaction. Particularly, MCCT allows for multi-vehicle coordination composed of different multi-source vehicles (\eg, physical vehicles, virtual vehicles and human-driven vehicles). Validations on vehicle platooning demonstrate the flexibility and scalability of MCCT.
Conflict-free Cooperation Method for Connected and Automated Vehicles at Unsignalized Intersections: Graph-based Modeling and Optimality Analysis
Jul 15, 2021
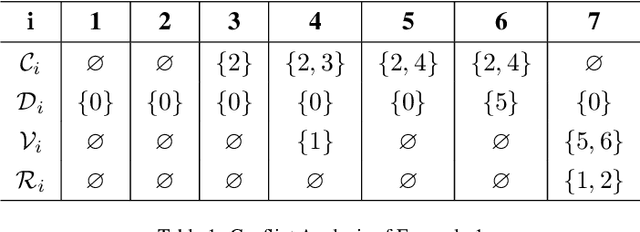
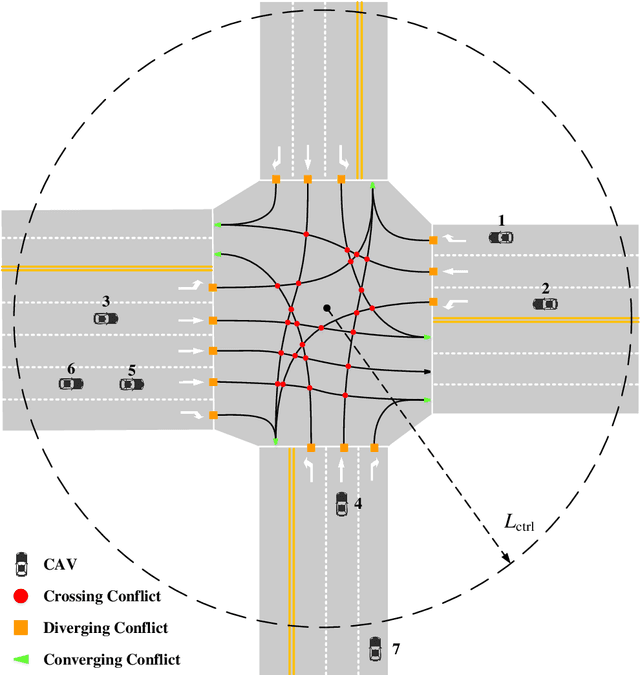

Connected and automated vehicles have shown great potential in improving traffic mobility and reducing emissions, especially at unsignalized intersections. Previous research has shown that vehicle passing order is the key influencing factor in improving intersection traffic mobility. In this paper, we propose a graph-based cooperation method to formalize the conflict-free scheduling problem at an unsignalized intersection. Based on graphical analysis, a vehicle's trajectory conflict relationship is modeled as a conflict directed graph and a coexisting undirected graph. Then, two graph-based methods are proposed to find the vehicle passing order. The first is an improved depth-first spanning tree algorithm, which aims to find the local optimal passing order vehicle by vehicle. The other novel method is a minimum clique cover algorithm, which identifies the global optimal solution. Finally, a distributed control framework and communication topology are presented to realize the conflict-free cooperation of vehicles. Extensive numerical simulations are conducted for various numbers of vehicles and traffic volumes, and the simulation results prove the effectiveness of the proposed algorithms.
Formation Control with Lane Preference for Connected and Automated Vehicles in Multi-lane Scenarios
Jun 18, 2021
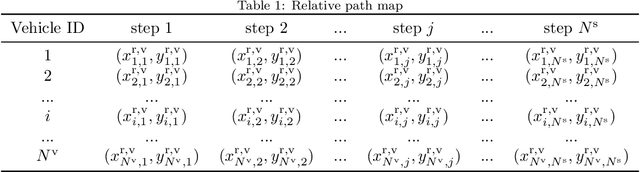
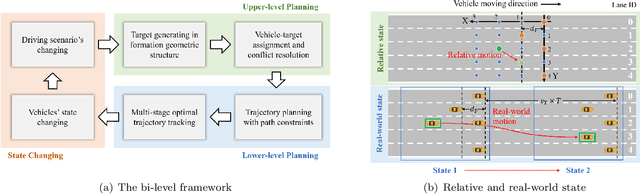
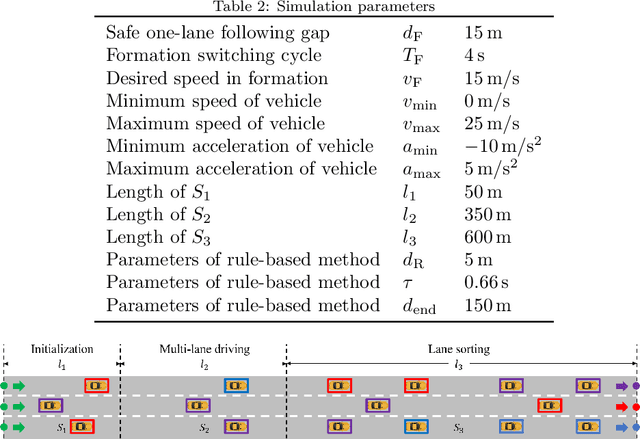
Multi-lane roads are typical scenarios in the real-world traffic system. Vehicles usually have preference on lanes according to their routes and destinations. Few of the existing studies looks into the problem of controlling vehicles to drive on their desired lanes. This paper proposes a formation control method that considers vehicles' preference on different lanes. The bi-level formation control framework is utilized to plan collision-free motion for vehicles, where relative target assignment and path planning are performed in the upper level, and trajectory planning and tracking are performed in the lower level. The collision-free multi-vehicle path planning problem considering lane preference is decoupled into two sub problems: calculating assignment list with non-decreasing cost and planning collision-free paths according to given assignment result. The Conflict-based Searching (CBS) method is utilized to plan collision-free paths for vehicles based on given assignment results. Case study is conducted and simulations are carried out in a three-lane road scenario. The results indicate that the proposed formation control method significantly reduces congestion and improves traffic efficiency at high traffic volumes, compared to the rule-based method.