 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeature Map Convergence Evaluation for Functional Module
Paper and Code
May 07, 2024

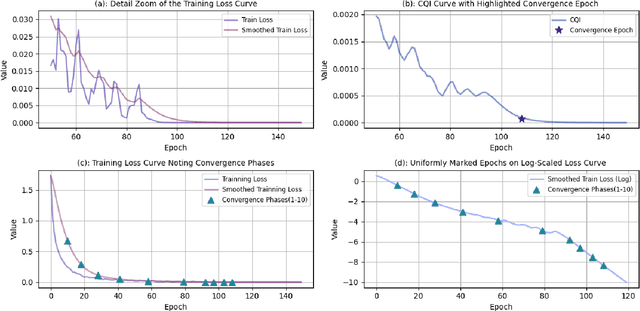
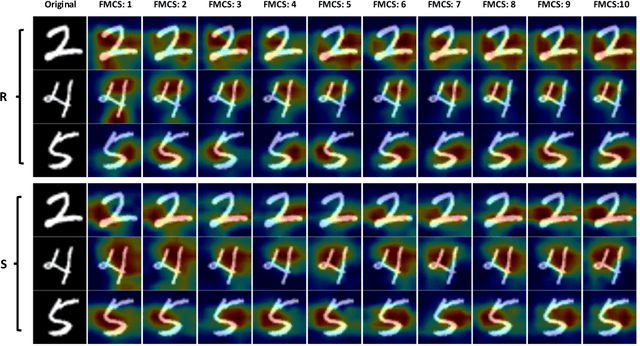
Autonomous driving perception models are typically composed of multiple functional modules that interact through complex relationships to accomplish environment understanding. However, perception models are predominantly optimized as a black box through end-to-end training, lacking independent evaluation of functional modules, which poses difficulties for interpretability and optimization. Pioneering in the issue, we propose an evaluation method based on feature map analysis to gauge the convergence of model, thereby assessing functional modules' training maturity. We construct a quantitative metric named as the Feature Map Convergence Score (FMCS) and develop Feature Map Convergence Evaluation Network (FMCE-Net) to measure and predict the convergence degree of models respectively. FMCE-Net achieves remarkable predictive accuracy for FMCS across multiple image classification experiments, validating the efficacy and robustness of the introduced approach. To the best of our knowledge, this is the first independent evaluation method for functional modules, offering a new paradigm for the training assessment towards perception models.