Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInfrared Beacons for Robust Localization
Apr 19, 2021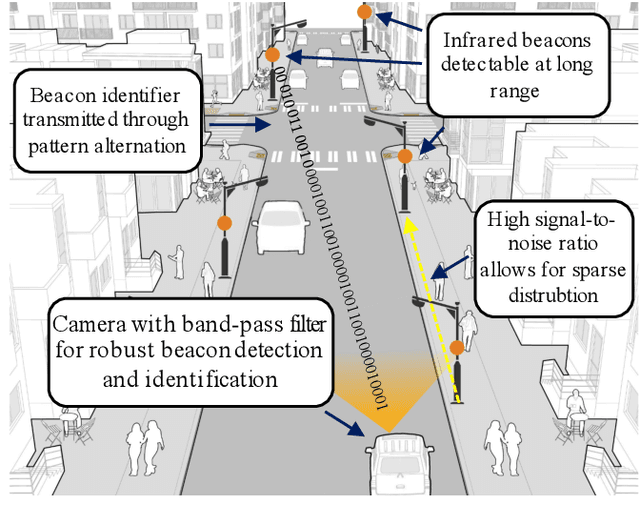
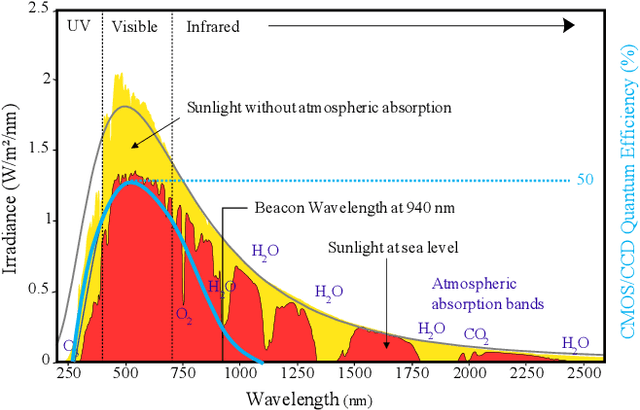
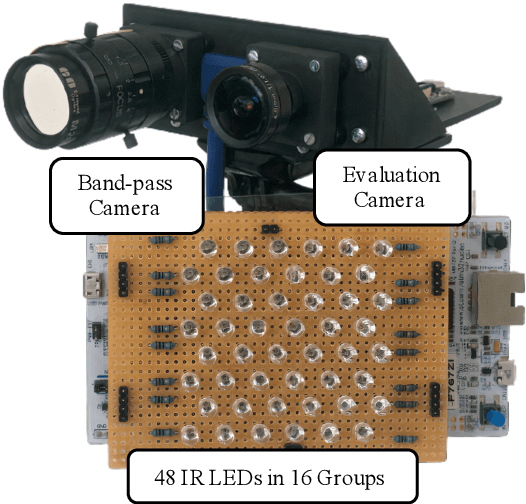

This paper presents a localization system that uses infrared beacons and a camera equipped with an optical band-pass filter. Our system can reliably detect and identify individual beacons at 100m distance regardless of lighting conditions. We describe the camera and beacon design as well as the image processing pipeline in detail. In our experiments, we investigate and demonstrate the ability of the system to recognize our beacons in both daytime and nighttime conditions. High precision localization is a key enabler for automated vehicles but remains unsolved, despite strong recent improvements. Our low-cost, infrastructure-based approach helps solve the localization problem. All datasets are made available.
Via