 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment and Testing of a Novel Automated Insect Capture Module for Sample Collection and Transfer
Aug 29, 2020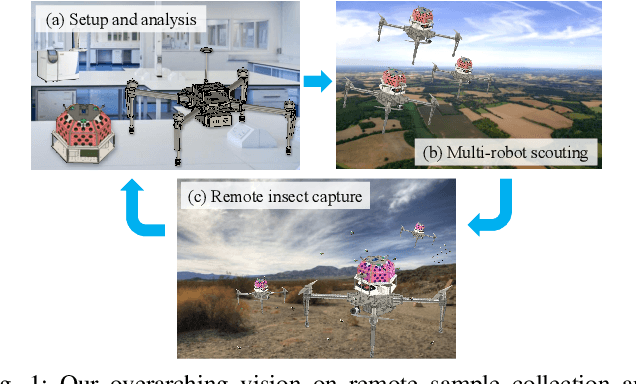
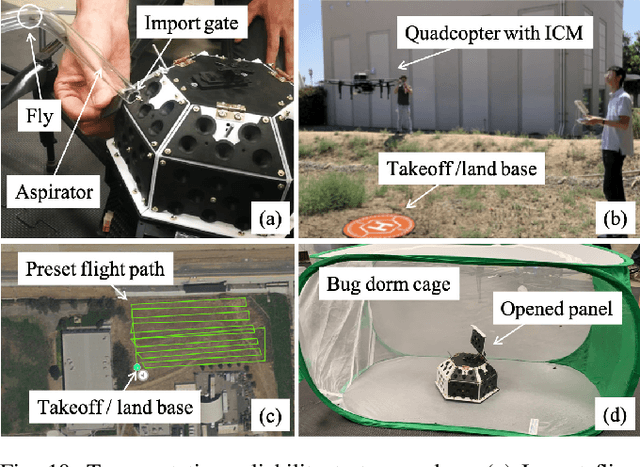
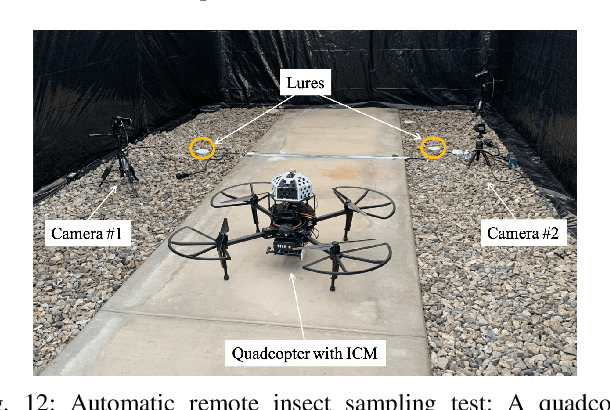
There exists an urgent need for efficient tools in disease surveillance to help model and predict the spread of disease. The transmission of insect-borne diseases poses a serious concern to public health officials and the medical and research community at large. In the modeling of this spread, we face bottlenecks in (1) the frequency at which we are able to sample insect vectors in environments that are prone to propagating disease, (2) manual labor needed to set up and retrieve surveillance devices like traps, and (3) the return time in analyzing insect samples and determining if an infectious disease is spreading in a region. To help address these bottlenecks, we present in this paper the design, fabrication, and testing of a novel automated insect capture module (ICM) or trap that aims to improve the rate of transferring samples collected from the environment via aerial robots. The ICM features an ultraviolet light attractant, passive capture mechanism, panels which can open and close for access to insects, and a small onboard computer for automated operation and data logging. At the same time, the ICM is designed to be accessible; it is small-scale, lightweight and low-cost, and can be integrated with commercially available aerial robots. Indoor and outdoor experimentation validates ICM's feasibility in insect capturing and safe transportation. The device can help bring us one step closer toward achieving fully autonomous and scalable epidemiology by leveraging autonomous robots technology to aid the medical and research community.