 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCo-Me: Confidence-Guided Token Merging for Visual Geometric Transformers
Nov 18, 2025We propose Confidence-Guided Token Merging (Co-Me), an acceleration mechanism for visual geometric transformers without retraining or finetuning the base model. Co-Me distilled a light-weight confidence predictor to rank tokens by uncertainty and selectively merge low-confidence ones, effectively reducing computation while maintaining spatial coverage. Compared to similarity-based merging or pruning, the confidence signal in Co-Me reliably indicates regions emphasized by the transformer, enabling substantial acceleration without degrading performance. Co-Me applies seamlessly to various multi-view and streaming visual geometric transformers, achieving speedups that scale with sequence length. When applied to VGGT and MapAnything, Co-Me achieves up to $11.3\times$ and $7.2\times$ speedup, making visual geometric transformers practical for real-time 3D perception and reconstruction.
VENTURA: Adapting Image Diffusion Models for Unified Task Conditioned Navigation
Oct 01, 2025Robots must adapt to diverse human instructions and operate safely in unstructured, open-world environments. Recent Vision-Language models (VLMs) offer strong priors for grounding language and perception, but remain difficult to steer for navigation due to differences in action spaces and pretraining objectives that hamper transferability to robotics tasks. Towards addressing this, we introduce VENTURA, a vision-language navigation system that finetunes internet-pretrained image diffusion models for path planning. Instead of directly predicting low-level actions, VENTURA generates a path mask (i.e. a visual plan) in image space that captures fine-grained, context-aware navigation behaviors. A lightweight behavior-cloning policy grounds these visual plans into executable trajectories, yielding an interface that follows natural language instructions to generate diverse robot behaviors. To scale training, we supervise on path masks derived from self-supervised tracking models paired with VLM-augmented captions, avoiding manual pixel-level annotation or highly engineered data collection setups. In extensive real-world evaluations, VENTURA outperforms state-of-the-art foundation model baselines on object reaching, obstacle avoidance, and terrain preference tasks, improving success rates by 33% and reducing collisions by 54% across both seen and unseen scenarios. Notably, we find that VENTURA generalizes to unseen combinations of distinct tasks, revealing emergent compositional capabilities. Videos, code, and additional materials: https://venturapath.github.io
An Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
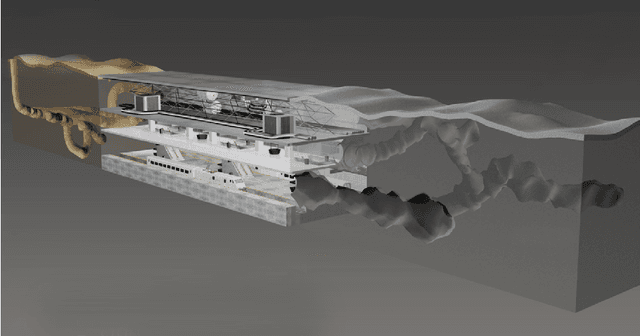
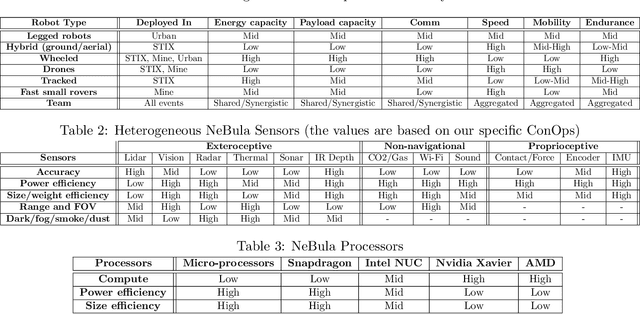
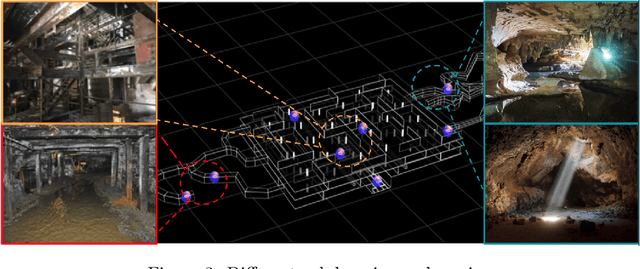
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
Early Recall, Late Precision: Multi-Robot Semantic Object Mapping under Operational Constraints in Perceptually-Degraded Environments
Jun 21, 2022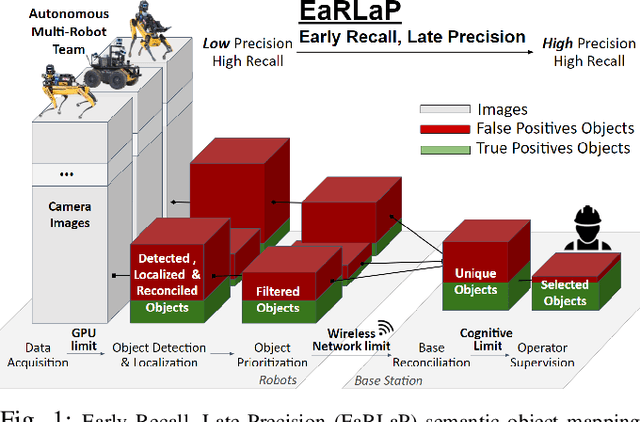
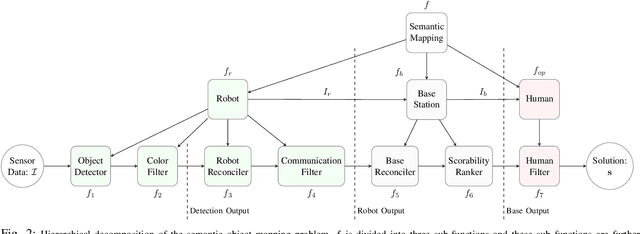
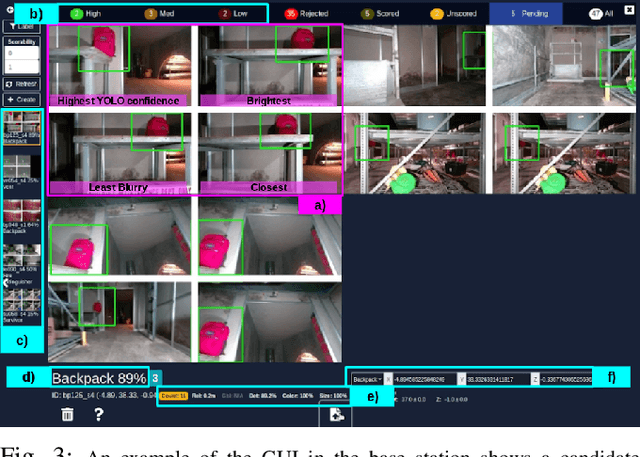
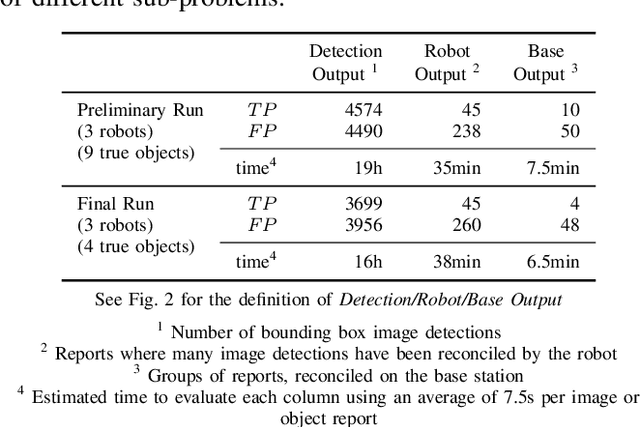
Semantic object mapping in uncertain, perceptually degraded environments during long-range multi-robot autonomous exploration tasks such as search-and-rescue is important and challenging. During such missions, high recall is desirable to avoid missing true target objects and high precision is also critical to avoid wasting valuable operational time on false positives. Given recent advancements in visual perception algorithms, the former is largely solvable autonomously, but the latter is difficult to address without the supervision of a human operator. However, operational constraints such as mission time, computational requirements, mesh network bandwidth and so on, can make the operator's task infeasible unless properly managed. We propose the Early Recall, Late Precision (EaRLaP) semantic object mapping pipeline to solve this problem. EaRLaP was used by Team CoSTAR in DARPA Subterranean Challenge, where it successfully detected all the artifacts encountered by the team of robots. We will discuss these results and performance of the EaRLaP on various datasets.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021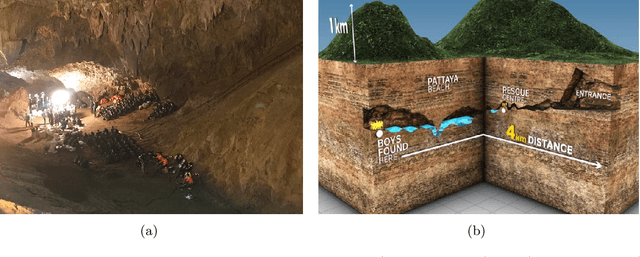
This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
Smoke Sky -- Exploring New Frontiers of Unmanned Aerial Systems for Wildland Fire Science and Applications
Nov 12, 2019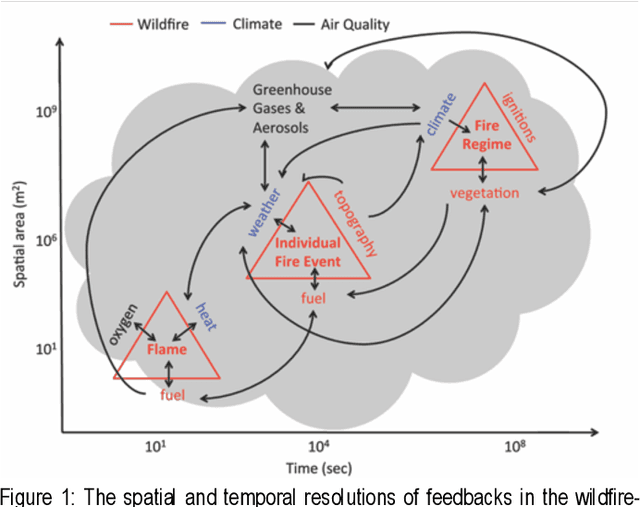
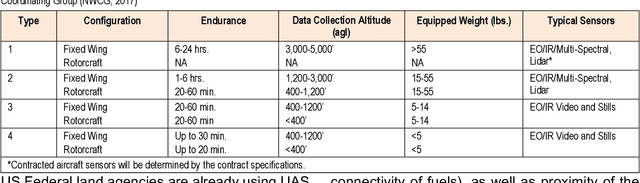
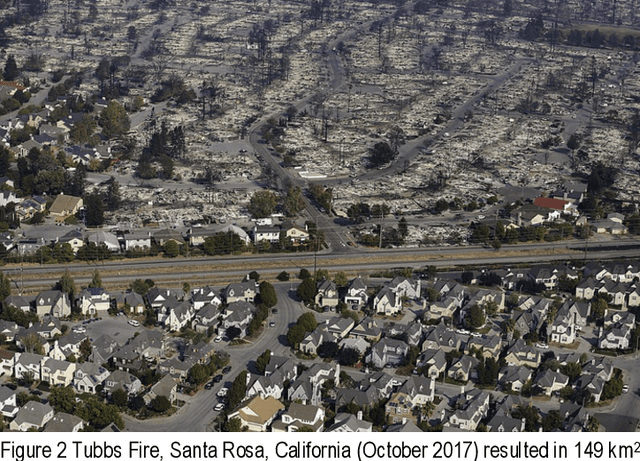
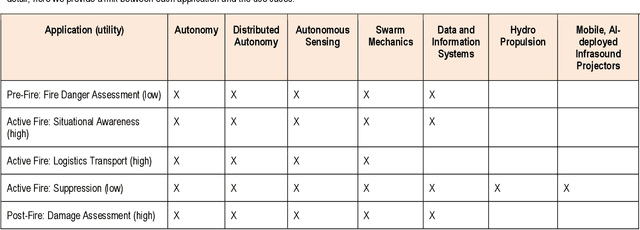
Wildfire has had increasing impacts on society as the climate changes and the wildland urban interface grows. As such, there is a demand for innovative solutions to help manage fire. Managing wildfire can include proactive fire management such as prescribed burning within constrained areas or advancements for reactive fire management (e.g., fire suppression). Because of the growing societal impact, the JPL BlueSky program sought to assess the current state of fire management and technology and determine areas with high return on investment. To accomplish this, we met with the national interagency Unmanned Aerial System (UAS) Advisory Group (UASAG) and with leading technology transfer experts for fire science and management applications. We provide an overview of the current state as well as an analysis of the impact, maturity and feasibility of integrating different technologies that can be developed by JPL. Based on the findings, the highest return on investment technologies for fire management are first to develop single micro-aerial vehicle (MAV) autonomy, autonomous sensing over fire, and the associated data and information system for active fire local environment mapping. Once this is completed for a single MAV, expanding the work to include many in a swarm would require further investment of distributed MAV autonomy and MAV swarm mechanics, but could greatly expand the breadth of application over large fires. Important to investing in these technologies will be in developing collaborations with the key influencers and champions for using UAS technology in fire management.