 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
Early Recall, Late Precision: Multi-Robot Semantic Object Mapping under Operational Constraints in Perceptually-Degraded Environments
Jun 21, 2022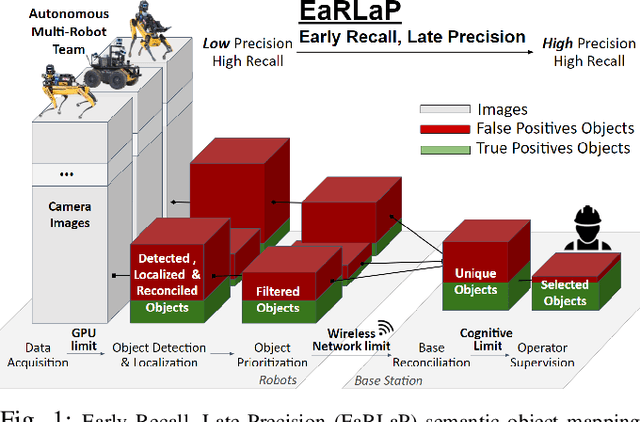
Semantic object mapping in uncertain, perceptually degraded environments during long-range multi-robot autonomous exploration tasks such as search-and-rescue is important and challenging. During such missions, high recall is desirable to avoid missing true target objects and high precision is also critical to avoid wasting valuable operational time on false positives. Given recent advancements in visual perception algorithms, the former is largely solvable autonomously, but the latter is difficult to address without the supervision of a human operator. However, operational constraints such as mission time, computational requirements, mesh network bandwidth and so on, can make the operator's task infeasible unless properly managed. We propose the Early Recall, Late Precision (EaRLaP) semantic object mapping pipeline to solve this problem. EaRLaP was used by Team CoSTAR in DARPA Subterranean Challenge, where it successfully detected all the artifacts encountered by the team of robots. We will discuss these results and performance of the EaRLaP on various datasets.
Learning Densities in Feature Space for Reliable Segmentation of Indoor Scenes
Aug 01, 2019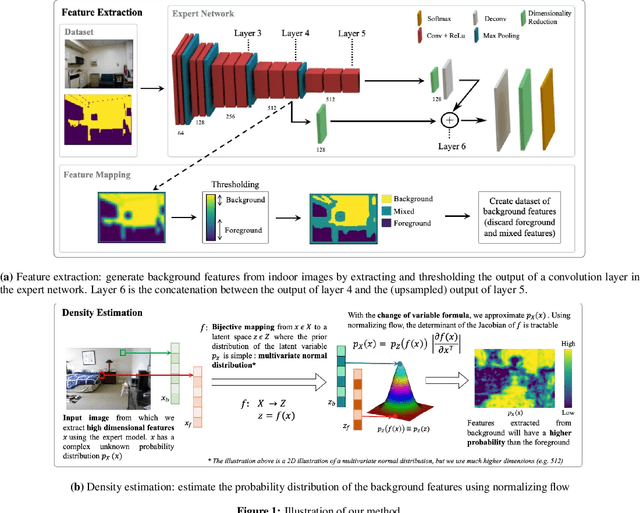
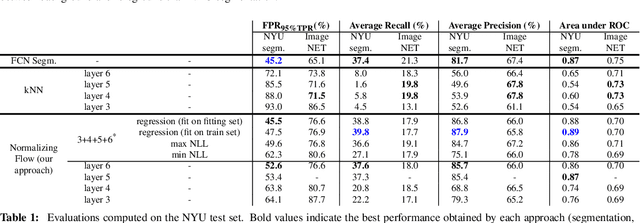
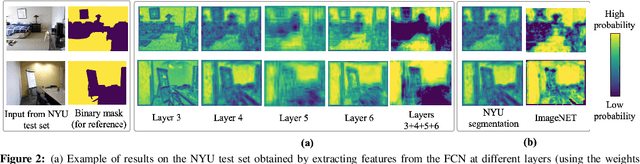

Deep learning has enabled remarkable advances in semantic segmentation and scene understanding. Yet, introducing novel elements, called out-of-distribution (OoD) data, decreases the performance of existing methods, which are usually limited to a fixed set of classes. This is a problem as autonomous agents will inevitably come across a wide range of objects, all of which cannot be included during training. We propose a novel method to distinguish any object (foreground) from empty building structure (background) in indoor environments. We use normalizing flow to estimate the probability distribution of high-dimensional background descriptors. Foreground objects are therefore detected as areas in an image for which the descriptors are unlikely given the background distribution. As our method does not explicitly learn the representation of individual objects, its performance generalizes well outside of the training examples. Our model results in an innovative solution to reliably segment foreground from background in indoor scenes, which opens the way to a safer deployment of robots in human environments.