 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Traversability Prediction by Learning to Reconstruct Safe Terrain
Aug 02, 2022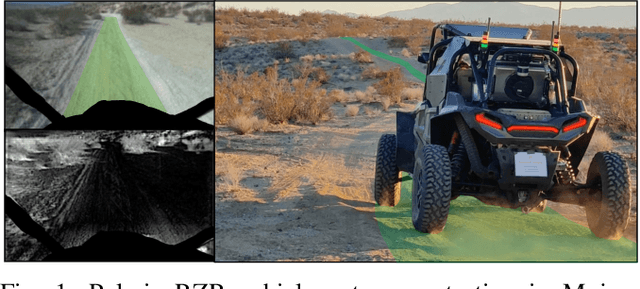
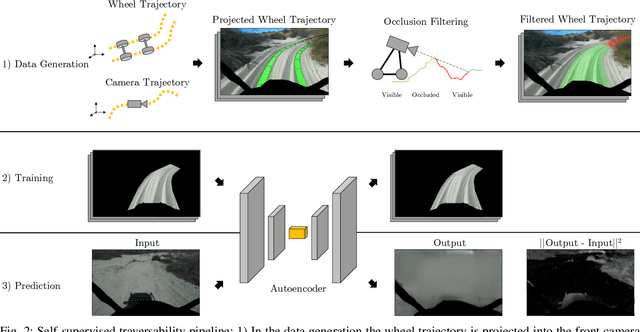
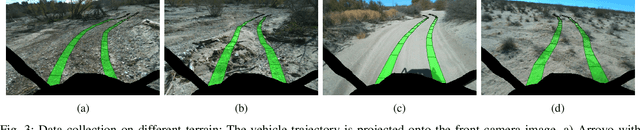
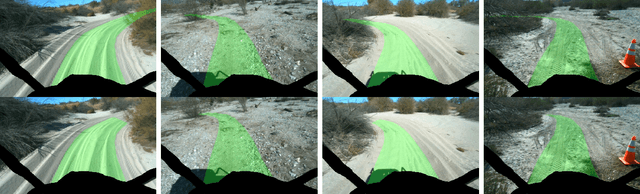
Navigating off-road with a fast autonomous vehicle depends on a robust perception system that differentiates traversable from non-traversable terrain. Typically, this depends on a semantic understanding which is based on supervised learning from images annotated by a human expert. This requires a significant investment in human time, assumes correct expert classification, and small details can lead to misclassification. To address these challenges, we propose a method for predicting high- and low-risk terrains from only past vehicle experience in a self-supervised fashion. First, we develop a tool that projects the vehicle trajectory into the front camera image. Second, occlusions in the 3D representation of the terrain are filtered out. Third, an autoencoder trained on masked vehicle trajectory regions identifies low- and high-risk terrains based on the reconstruction error. We evaluated our approach with two models and different bottleneck sizes with two different training and testing sites with a fourwheeled off-road vehicle. Comparison with two independent test sets of semantic labels from similar terrain as training sites demonstrates the ability to separate the ground as low-risk and the vegetation as high-risk with 81.1% and 85.1% accuracy.
Early Recall, Late Precision: Multi-Robot Semantic Object Mapping under Operational Constraints in Perceptually-Degraded Environments
Jun 21, 2022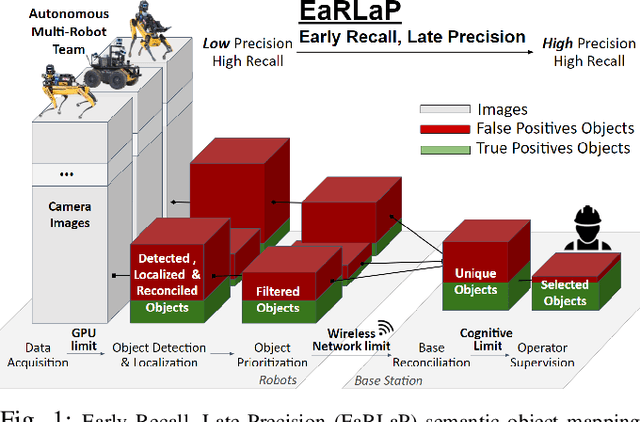
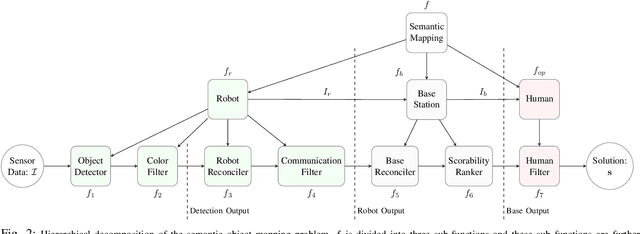
Semantic object mapping in uncertain, perceptually degraded environments during long-range multi-robot autonomous exploration tasks such as search-and-rescue is important and challenging. During such missions, high recall is desirable to avoid missing true target objects and high precision is also critical to avoid wasting valuable operational time on false positives. Given recent advancements in visual perception algorithms, the former is largely solvable autonomously, but the latter is difficult to address without the supervision of a human operator. However, operational constraints such as mission time, computational requirements, mesh network bandwidth and so on, can make the operator's task infeasible unless properly managed. We propose the Early Recall, Late Precision (EaRLaP) semantic object mapping pipeline to solve this problem. EaRLaP was used by Team CoSTAR in DARPA Subterranean Challenge, where it successfully detected all the artifacts encountered by the team of robots. We will discuss these results and performance of the EaRLaP on various datasets.