 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAMO: Category-Agnostic 3D Motion Transfer from Monocular 2D Videos
Jan 06, 2026Motion transfer from 2D videos to 3D assets is a challenging problem, due to inherent pose ambiguities and diverse object shapes, often requiring category-specific parametric templates. We propose CAMO, a category-agnostic framework that transfers motion to diverse target meshes directly from monocular 2D videos without relying on predefined templates or explicit 3D supervision. The core of CAMO is a morphology-parameterized articulated 3D Gaussian splatting model combined with dense semantic correspondences to jointly adapt shape and pose through optimization. This approach effectively alleviates shape-pose ambiguities, enabling visually faithful motion transfer for diverse categories. Experimental results demonstrate superior motion accuracy, efficiency, and visual coherence compared to existing methods, significantly advancing motion transfer in varied object categories and casual video scenarios.
Pose-free 3D Gaussian splatting via shape-ray estimation
May 29, 2025



While generalizable 3D Gaussian splatting enables efficient, high-quality rendering of unseen scenes, it heavily depends on precise camera poses for accurate geometry. In real-world scenarios, obtaining accurate poses is challenging, leading to noisy pose estimates and geometric misalignments. To address this, we introduce SHARE, a pose-free, feed-forward Gaussian splatting framework that overcomes these ambiguities by joint shape and camera rays estimation. Instead of relying on explicit 3D transformations, SHARE builds a pose-aware canonical volume representation that seamlessly integrates multi-view information, reducing misalignment caused by inaccurate pose estimates. Additionally, anchor-aligned Gaussian prediction enhances scene reconstruction by refining local geometry around coarse anchors, allowing for more precise Gaussian placement. Extensive experiments on diverse real-world datasets show that our method achieves robust performance in pose-free generalizable Gaussian splatting.
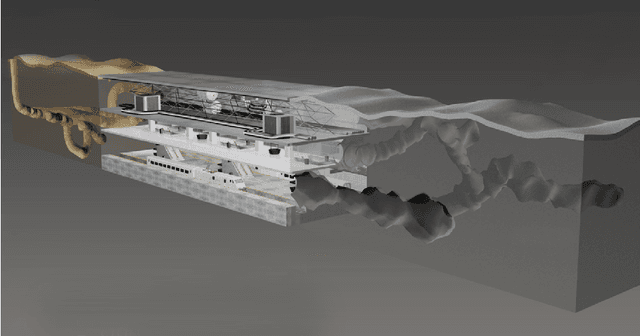
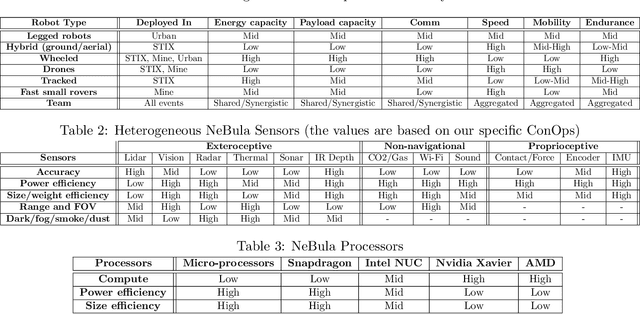
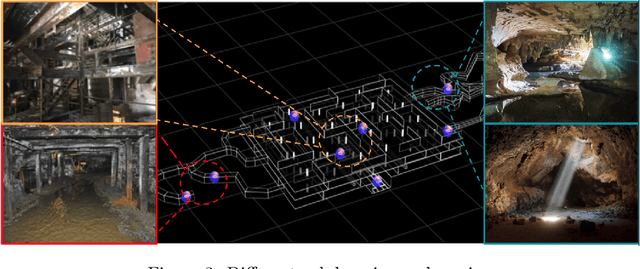
An Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
PECI-Net: Bolus segmentation from video fluoroscopic swallowing study images using preprocessing ensemble and cascaded inference
Mar 21, 2024Bolus segmentation is crucial for the automated detection of swallowing disorders in videofluoroscopic swallowing studies (VFSS). However, it is difficult for the model to accurately segment a bolus region in a VFSS image because VFSS images are translucent, have low contrast and unclear region boundaries, and lack color information. To overcome these challenges, we propose PECI-Net, a network architecture for VFSS image analysis that combines two novel techniques: the preprocessing ensemble network (PEN) and the cascaded inference network (CIN). PEN enhances the sharpness and contrast of the VFSS image by combining multiple preprocessing algorithms in a learnable way. CIN reduces ambiguity in bolus segmentation by using context from other regions through cascaded inference. Moreover, CIN prevents undesirable side effects from unreliably segmented regions by referring to the context in an asymmetric way. In experiments, PECI-Net exhibited higher performance than four recently developed baseline models, outperforming TernausNet, the best among the baseline models, by 4.54\% and the widely used UNet by 10.83\%. The results of the ablation studies confirm that CIN and PEN are effective in improving bolus segmentation performance.
* 20 pages, 8 figures,
Early Recall, Late Precision: Multi-Robot Semantic Object Mapping under Operational Constraints in Perceptually-Degraded Environments
Jun 21, 2022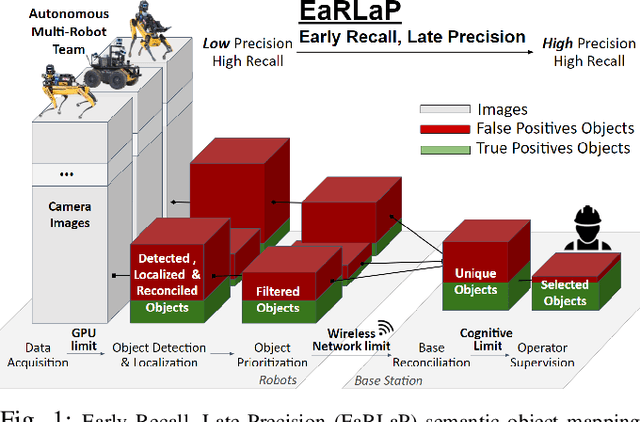
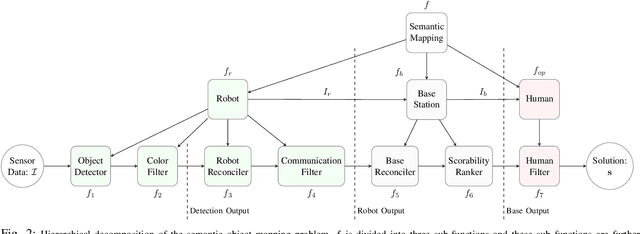
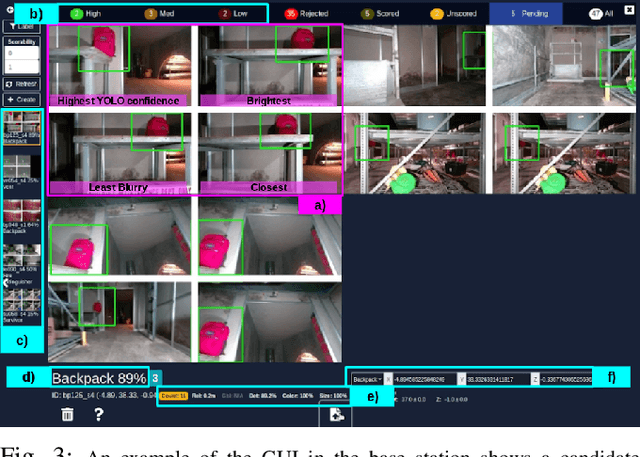
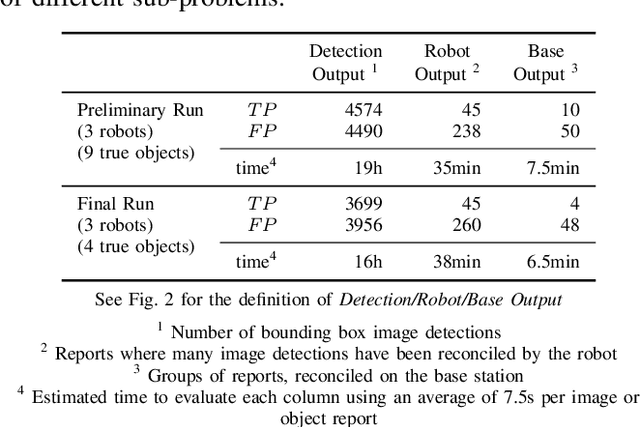
Semantic object mapping in uncertain, perceptually degraded environments during long-range multi-robot autonomous exploration tasks such as search-and-rescue is important and challenging. During such missions, high recall is desirable to avoid missing true target objects and high precision is also critical to avoid wasting valuable operational time on false positives. Given recent advancements in visual perception algorithms, the former is largely solvable autonomously, but the latter is difficult to address without the supervision of a human operator. However, operational constraints such as mission time, computational requirements, mesh network bandwidth and so on, can make the operator's task infeasible unless properly managed. We propose the Early Recall, Late Precision (EaRLaP) semantic object mapping pipeline to solve this problem. EaRLaP was used by Team CoSTAR in DARPA Subterranean Challenge, where it successfully detected all the artifacts encountered by the team of robots. We will discuss these results and performance of the EaRLaP on various datasets.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021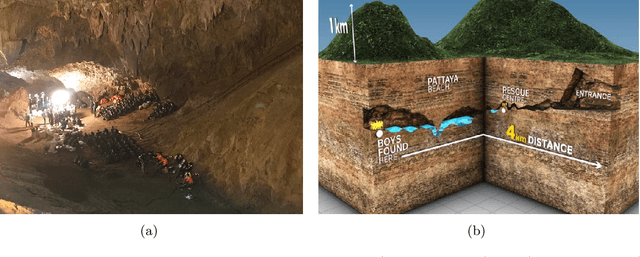
This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
BAXTER: Bi-modal Aerial-Terrestrial Hybrid Vehicle for Long-endurance Versatile Mobility: Preprint Version
Feb 05, 2021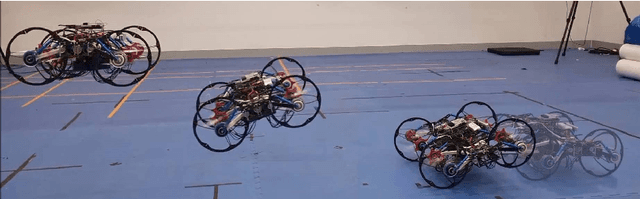
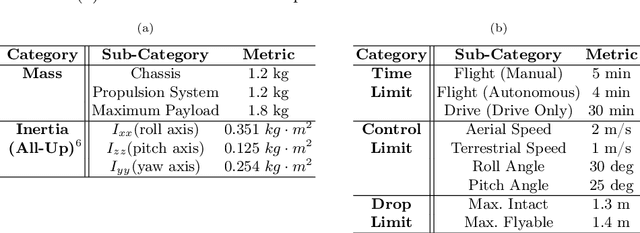
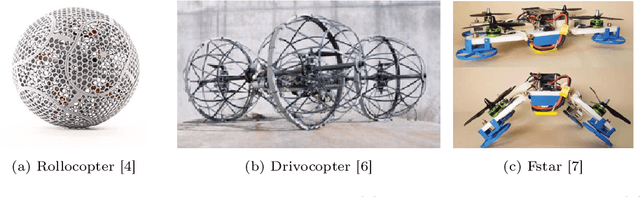
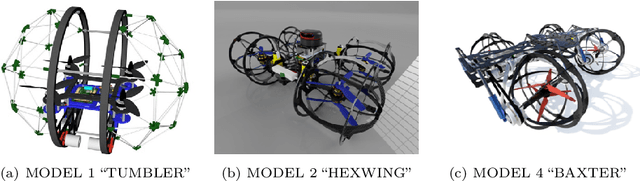
Unmanned aerial vehicles are rapidly evolving within the field of robotics. However, their performance is often limited by payload capacity, operational time, and robustness to impact and collision. These limitations of aerial vehicles become more acute for missions in challenging environments such as subterranean structures which may require extended autonomous operation in confined spaces. While software solutions for aerial robots are developing rapidly, improvements to hardware are critical to applying advanced planners and algorithms in large and dangerous environments where the short range and high susceptibility to collisions of most modern aerial robots make applications in realistic subterranean missions infeasible. To provide such hardware capabilities, one needs to design and implement a hardware solution that takes into the account the Size, Weight, and Power (SWaP) constraints. This work focuses on providing a robust and versatile hybrid platform that improves payload capacity, operation time, endurance, and versatility. The Bi-modal Aerial and Terrestrial hybrid vehicle (BAXTER) is a solution that provides two modes of operation, aerial and terrestrial. BAXTER employs two novel hardware mechanisms: the M-Suspension and the Decoupled Transmission which together provide resilience during landing and crashes and efficient terrestrial operation. Extensive flight tests were conducted to characterize the vehicle's capabilities, including robustness and endurance. Additionally, we propose Agile Mode Transfer (AMT), a transition from aerial to terrestrial operation that seeks to minimize impulses during impact to the ground which is a quick and simple transition process that exploits BAXTER's resilience to impact.