 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021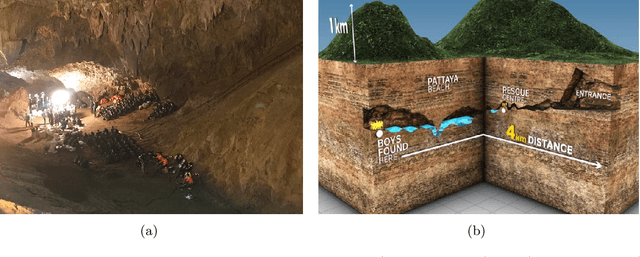
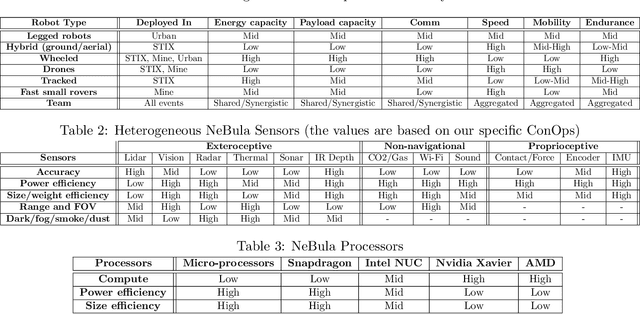
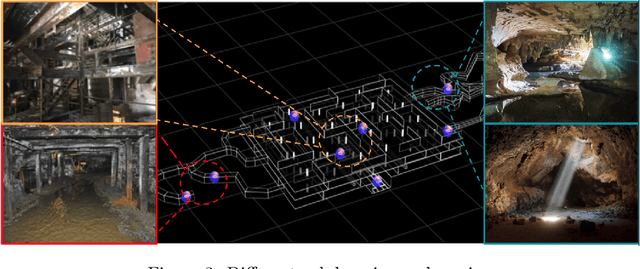
This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
BAXTER: Bi-modal Aerial-Terrestrial Hybrid Vehicle for Long-endurance Versatile Mobility: Preprint Version
Feb 05, 2021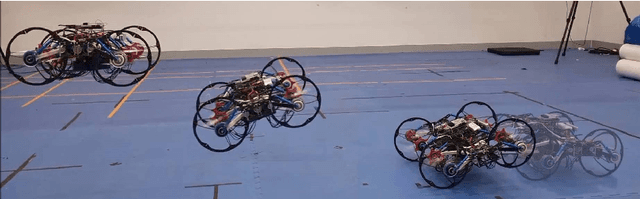
Unmanned aerial vehicles are rapidly evolving within the field of robotics. However, their performance is often limited by payload capacity, operational time, and robustness to impact and collision. These limitations of aerial vehicles become more acute for missions in challenging environments such as subterranean structures which may require extended autonomous operation in confined spaces. While software solutions for aerial robots are developing rapidly, improvements to hardware are critical to applying advanced planners and algorithms in large and dangerous environments where the short range and high susceptibility to collisions of most modern aerial robots make applications in realistic subterranean missions infeasible. To provide such hardware capabilities, one needs to design and implement a hardware solution that takes into the account the Size, Weight, and Power (SWaP) constraints. This work focuses on providing a robust and versatile hybrid platform that improves payload capacity, operation time, endurance, and versatility. The Bi-modal Aerial and Terrestrial hybrid vehicle (BAXTER) is a solution that provides two modes of operation, aerial and terrestrial. BAXTER employs two novel hardware mechanisms: the M-Suspension and the Decoupled Transmission which together provide resilience during landing and crashes and efficient terrestrial operation. Extensive flight tests were conducted to characterize the vehicle's capabilities, including robustness and endurance. Additionally, we propose Agile Mode Transfer (AMT), a transition from aerial to terrestrial operation that seeks to minimize impulses during impact to the ground which is a quick and simple transition process that exploits BAXTER's resilience to impact.