 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
Self-Supervised Traversability Prediction by Learning to Reconstruct Safe Terrain
Aug 02, 2022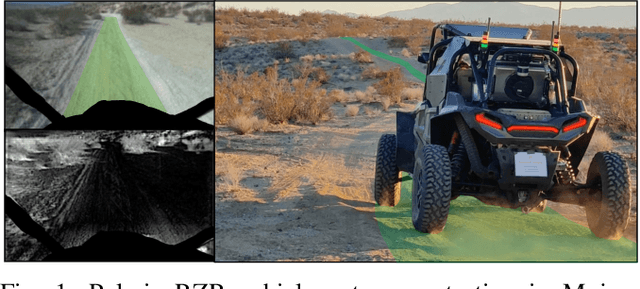
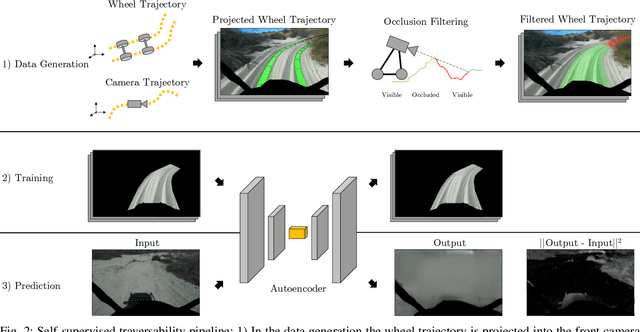
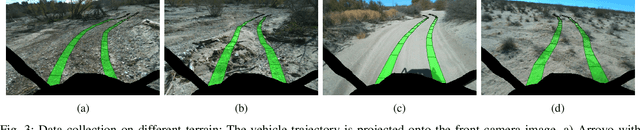
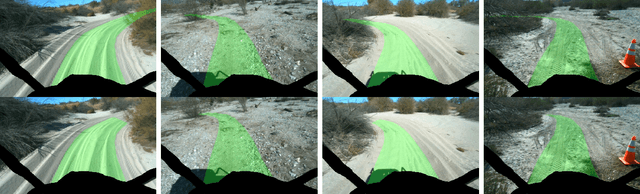
Navigating off-road with a fast autonomous vehicle depends on a robust perception system that differentiates traversable from non-traversable terrain. Typically, this depends on a semantic understanding which is based on supervised learning from images annotated by a human expert. This requires a significant investment in human time, assumes correct expert classification, and small details can lead to misclassification. To address these challenges, we propose a method for predicting high- and low-risk terrains from only past vehicle experience in a self-supervised fashion. First, we develop a tool that projects the vehicle trajectory into the front camera image. Second, occlusions in the 3D representation of the terrain are filtered out. Third, an autoencoder trained on masked vehicle trajectory regions identifies low- and high-risk terrains based on the reconstruction error. We evaluated our approach with two models and different bottleneck sizes with two different training and testing sites with a fourwheeled off-road vehicle. Comparison with two independent test sets of semantic labels from similar terrain as training sites demonstrates the ability to separate the ground as low-risk and the vegetation as high-risk with 81.1% and 85.1% accuracy.
Towards Robust State Estimation by Boosting the Maximum Correntropy Criterion Kalman Filter with Adaptive Behaviors
Mar 29, 2021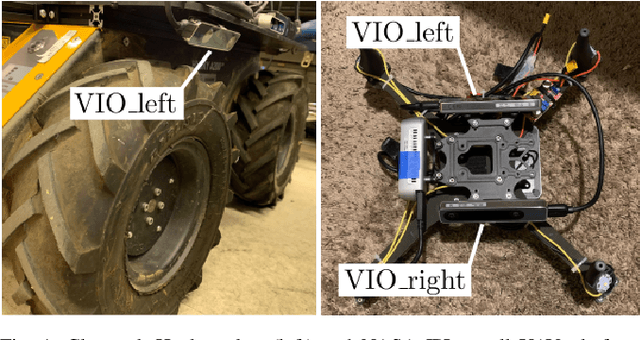
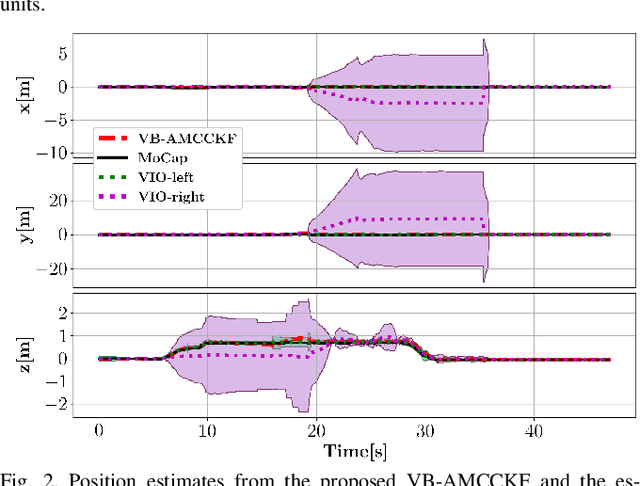
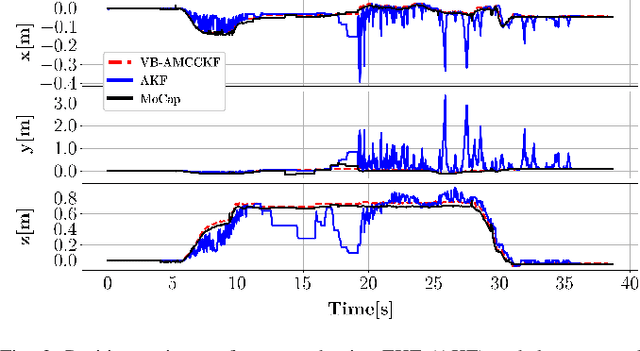
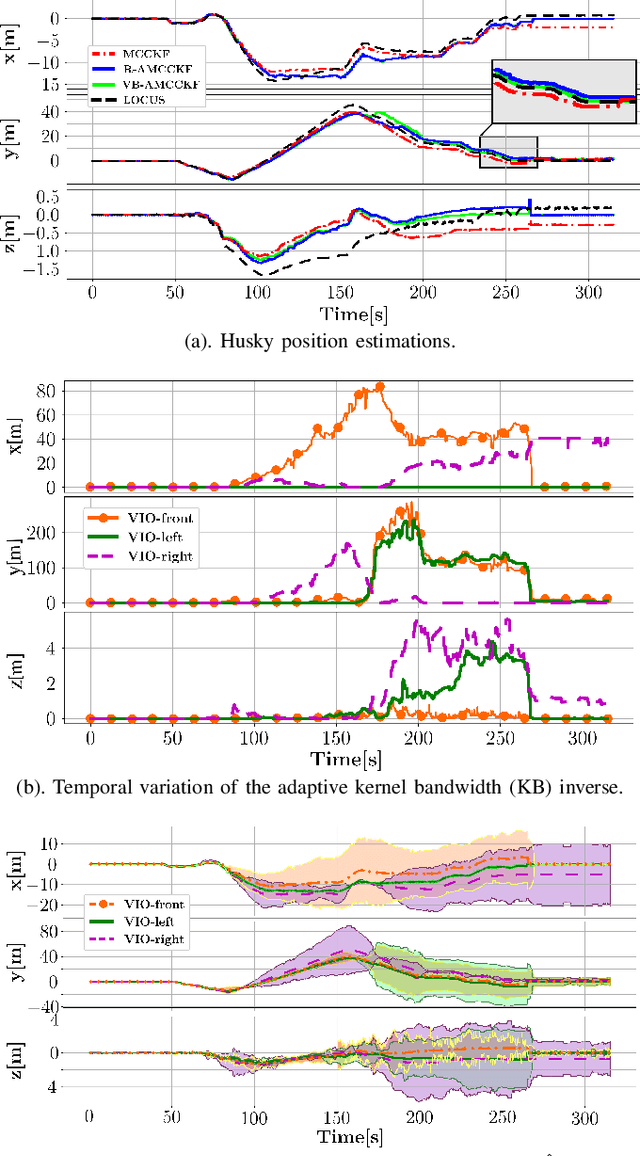
This work proposes a resilient and adaptive state estimation framework for robots operating in perceptually-degraded environments. The approach, called Adaptive Maximum Correntropy Criterion Kalman Filtering (AMCCKF), is inherently robust to corrupted measurements, such as those containing jumps or general non-Gaussian noise, and is able to modify filter parameters online to improve performance. Two separate methods are developed -- the Variational Bayesian AMCCKF (VB-AMCCKF) and Residual AMCCKF (R-AMCCKF) -- that modify the process and measurement noise models in addition to the bandwidth of the kernel function used in MCCKF based on the quality of measurements received. The two approaches differ in computational complexity and overall performance which is experimentally analyzed. The method is demonstrated in real experiments on both aerial and ground robots and is part of the solution used by the COSTAR team participating at the DARPA Subterranean Challenge.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021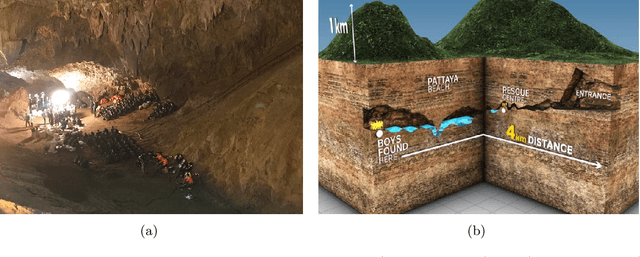
This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.