 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNew Insights into Cascaded Geometric Flight Control: From Performance Guarantees to Practical Pitfalls
Dec 30, 2025We present a new stability proof for cascaded geometric control used by aerial vehicles tracking time-varying position trajectories. Our approach uses sliding variables and a recently proposed quaternion-based sliding controller to demonstrate that exponentially convergent position trajectory tracking is theoretically possible. Notably, our analysis reveals new aspects of the control strategy, including how tracking error in the attitude loop influences the position loop, how model uncertainties affect the closed-loop system, and the practical pitfalls of the control architecture.
Geometric Multi-Session Map Merging with Learned Local Descriptors
Dec 30, 2025Multi-session map merging is crucial for extended autonomous operations in large-scale environments. In this paper, we present GMLD, a learning-based local descriptor framework for large-scale multi-session point cloud map merging that systematically aligns maps collected across different sessions with overlapping regions. The proposed framework employs a keypoint-aware encoder and a plane-based geometric transformer to extract discriminative features for loop closure detection and relative pose estimation. To further improve global consistency, we include inter-session scan matching cost factors in the factor-graph optimization stage. We evaluate our framework on the public datasets, as well as self-collected data from diverse environments. The results show accurate and robust map merging with low error, and the learned features deliver strong performance in both loop closure detection and relative pose estimation.
OptMap: Geometric Map Distillation via Submodular Maximization
Dec 08, 2025

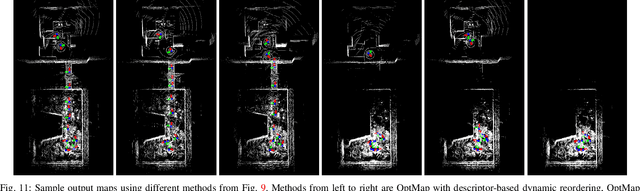

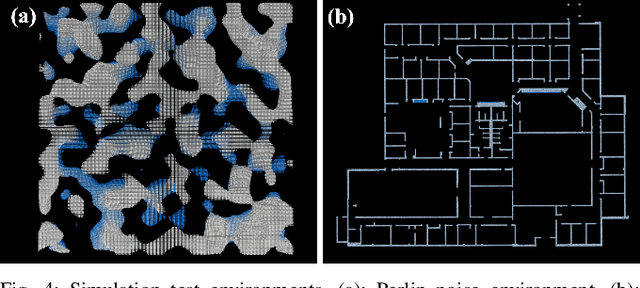
Autonomous robots rely on geometric maps to inform a diverse set of perception and decision-making algorithms. As autonomy requires reasoning and planning on multiple scales of the environment, each algorithm may require a different map for optimal performance. Light Detection And Ranging (LiDAR) sensors generate an abundance of geometric data to satisfy these diverse requirements, but selecting informative, size-constrained maps is computationally challenging as it requires solving an NP-hard combinatorial optimization. In this work we present OptMap: a geometric map distillation algorithm which achieves real-time, application-specific map generation via multiple theoretical and algorithmic innovations. A central feature is the maximization of set functions that exhibit diminishing returns, i.e., submodularity, using polynomial-time algorithms with provably near-optimal solutions. We formulate a novel submodular reward function which quantifies informativeness, reduces input set sizes, and minimizes bias in sequentially collected datasets. Further, we propose a dynamically reordered streaming submodular algorithm which improves empirical solution quality and addresses input order bias via an online approximation of the value of all scans. Testing was conducted on open-source and custom datasets with an emphasis on long-duration mapping sessions, highlighting OptMap's minimal computation requirements. Open-source ROS1 and ROS2 packages are available and can be used alongside any LiDAR SLAM algorithm.
STITCHER: Real-Time Trajectory Planning with Motion Primitive Search
Dec 30, 2024


Autonomous high-speed navigation through large, complex environments requires real-time generation of agile trajectories that are dynamically feasible, collision-free, and satisfy state or actuator constraints. Most modern trajectory planning techniques rely on numerical optimization because high-quality, expressive trajectories that satisfy various constraints can be systematically computed. However, meeting computation time constraints and the potential for numerical instabilities can limit the use of optimization-based planners in safety-critical scenarios. This work presents an optimization-free planning framework that stitches short trajectory segments together with graph search to compute long range, expressive, and near-optimal trajectories in real-time. Our STITCHER algorithm is shown to outperform modern optimization-based planners through our innovative planning architecture and several algorithmic developments that make real-time planning possible. Extensive simulation testing is conducted to analyze the algorithmic components that make up STITCHER, and a thorough comparison with two state-of-the-art optimization planners is performed. It is shown STITCHER can generate trajectories through complex environments over long distances (tens of meters) with low computation times (milliseconds).
Quaternion Sliding Variables in Manipulator Control
Dec 25, 2024We present two quaternion-based sliding variables for controlling the orientation of a manipulator's end-effector. Both sliding variables are free of singularities and represent global exponentially convergent error dynamics that do not exhibit unwinding when used in feedback. The choice of sliding variable is dictated by whether the end-effector's angular velocity vector is expressed in a local or global frame, and is a matter of convenience. Using quaternions allows the end-effector to move in its full operational envelope, which is not possible with other representations, e.g., Euler angles, that introduce representation-specific singularities. Further, the presented stability results are global rather than almost global, where the latter is often the best one can achieve when using rotation matrices to represent orientation.
Submodular Optimization for Keyframe Selection & Usage in SLAM
Oct 08, 2024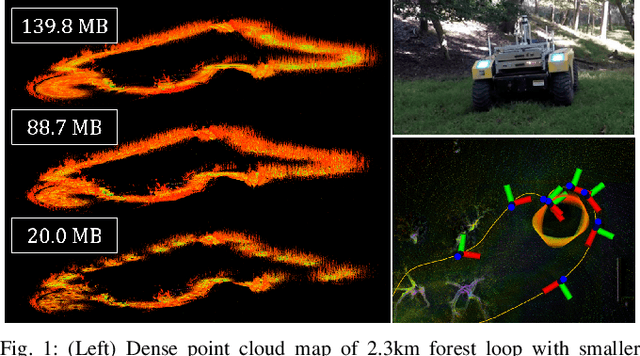

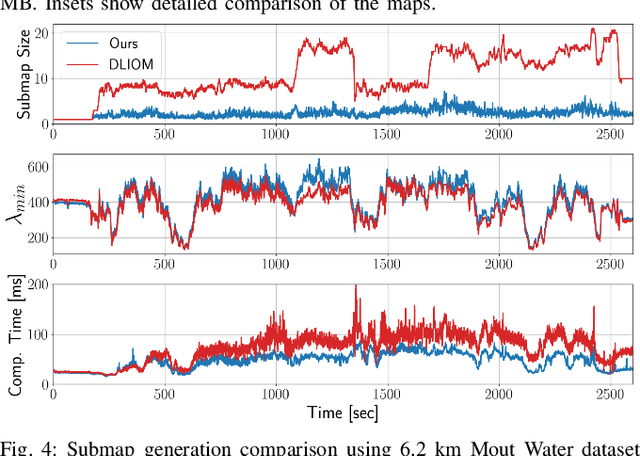
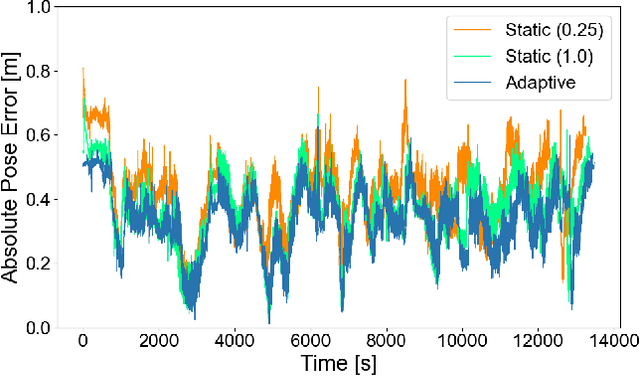
Keyframes are LiDAR scans saved for future reference in Simultaneous Localization And Mapping (SLAM), but despite their central importance most algorithms leave choices of which scans to save and how to use them to wasteful heuristics. This work proposes two novel keyframe selection strategies for localization and map summarization, as well as a novel approach to submap generation which selects keyframes that best constrain localization. Our results show that online keyframe selection and submap generation reduce the number of saved keyframes and improve per scan computation time without compromising localization performance. We also present a map summarization feature for quickly capturing environments under strict map size constraints.
LiDAR Inertial Odometry And Mapping Using Learned Registration-Relevant Features
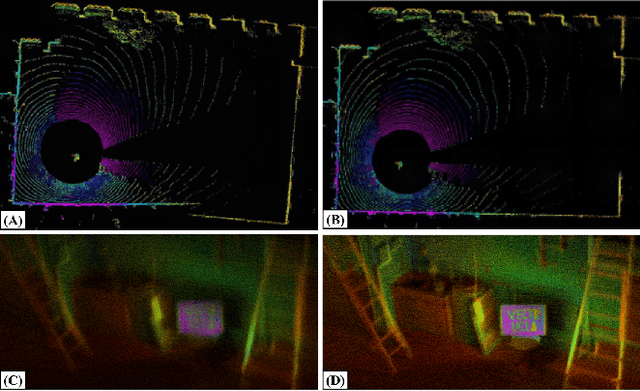
Oct 03, 2024SLAM is an important capability for many autonomous systems, and modern LiDAR-based methods offer promising performance. However, for long duration missions, existing works that either operate directly the full pointclouds or on extracted features face key tradeoffs in accuracy and computational efficiency (e.g., memory consumption). To address these issues, this paper presents DFLIOM with several key innovations. Unlike previous methods that rely on handcrafted heuristics and hand-tuned parameters for feature extraction, we propose a learning-based approach that select points relevant to LiDAR SLAM pointcloud registration. Furthermore, we extend our prior work DLIOM with the learned feature extractor and observe our method enables similar or even better localization performance using only about 20\% of the points in the dense point clouds. We demonstrate that DFLIOM performs well on multiple public benchmarks, achieving a 2.4\% decrease in localization error and 57.5\% decrease in memory usage compared to state-of-the-art methods (DLIOM). Although extracting features with the proposed network requires extra time, it is offset by the faster processing time downstream, thus maintaining real-time performance using 20Hz LiDAR on our hardware setup. The effectiveness of our learning-based feature extraction module is further demonstrated through comparison with several handcrafted feature extractors.
Dynamic Adaptation Gains for Nonlinear Systems with Unmatched Uncertainties
Nov 09, 2023We present a new direct adaptive control approach for nonlinear systems with unmatched and matched uncertainties. The method relies on adjusting the adaptation gains of individual unmatched parameters whose adaptation transients would otherwise destabilize the closed-loop system. The approach also guarantees the restoration of the adaptation gains to their nominal values and can readily incorporate direct adaptation laws for matched uncertainties. The proposed framework is general as it only requires stabilizability for all possible models.
Multi-Robot Task Assignment and Path Finding for Time-Sensitive Missions with Online Task Generation
Oct 09, 2023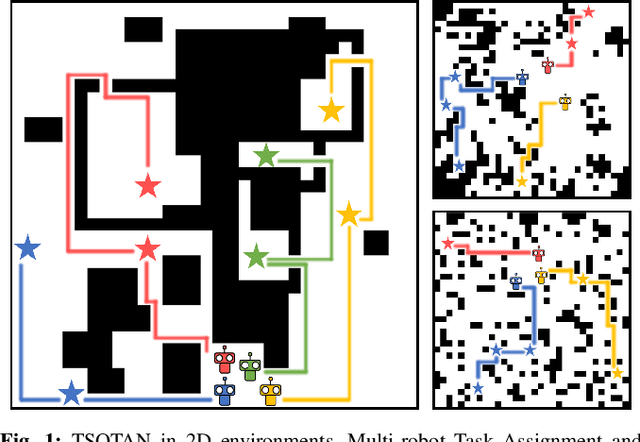


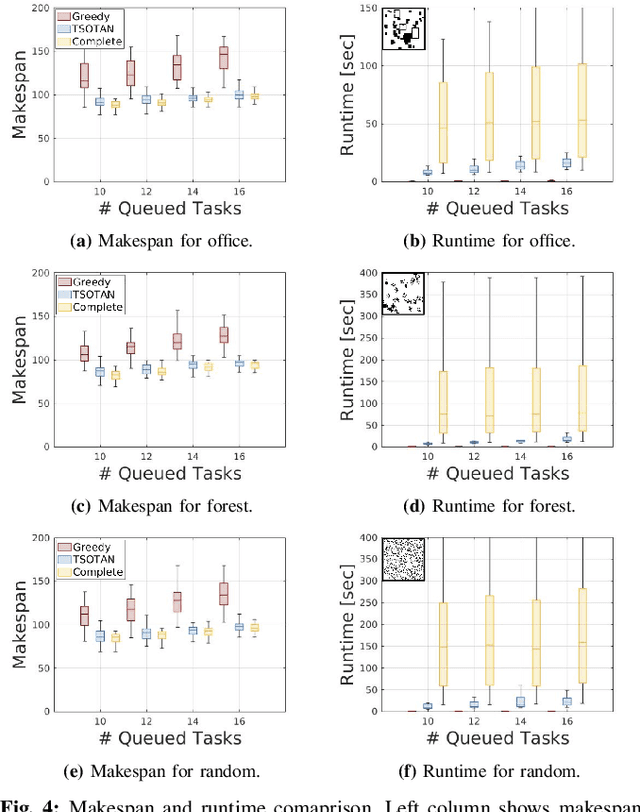
Executing time-sensitive multi-robot missions involves two distinct problems: Multi-Robot Task Assignment (MRTA) and Multi-Agent Path Finding (MAPF). Computing safe paths that complete every task and minimize the time to mission completion, or makespan, is a significant computational challenge even for small teams. In many missions, tasks can be generated during execution which is typically handled by either recomputing task assignments and paths from scratch, or by modifying existing plans using approximate approaches. While performing task reassignment and path finding from scratch produces theoretically optimal results, the computational load makes it too expensive for online implementation. In this work, we present Time-Sensitive Online Task Assignment and Navigation (TSOTAN), a framework which can quickly incorporate online generated tasks while guaranteeing bounded suboptimal task assignment makespans. It does this by assessing the quality of partial task reassignments and only performing a complete reoptimization when the makespan exceeds a user specified suboptimality bound. Through experiments in 2D environments we demonstrate TSOTAN's ability to produce quality solutions with computation times suitable for online implementation.
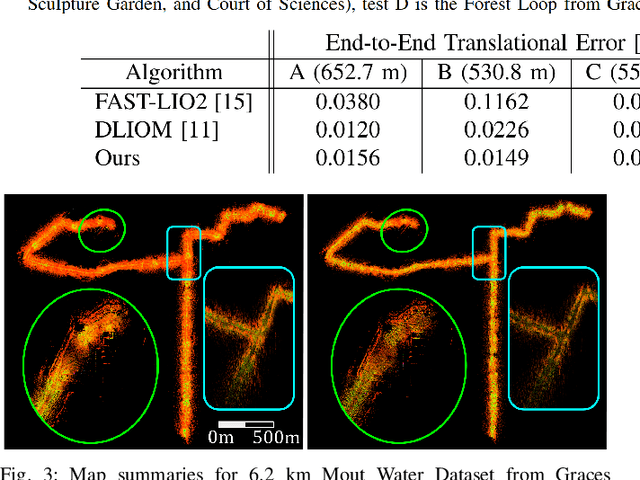
Direct LiDAR-Inertial Odometry and Mapping: Perceptive and Connective SLAM
May 03, 2023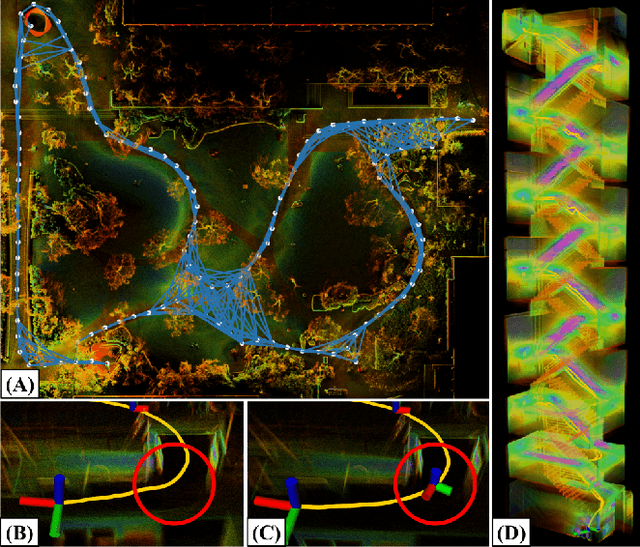

This paper presents Direct LiDAR-Inertial Odometry and Mapping (DLIOM), a robust SLAM algorithm with an explicit focus on computational efficiency, operational reliability, and real-world efficacy. DLIOM contains several key algorithmic innovations in both the front-end and back-end subsystems to design a resilient LiDAR-inertial architecture that is perceptive to the environment and produces accurate localization and high-fidelity 3D mapping for autonomous robotic platforms. Our ideas spawned after a deep investigation into modern LiDAR SLAM systems and their inabilities to generalize across different operating environments, in which we address several common algorithmic failure points by means of proactive safe-guards to provide long-term operational reliability in the unstructured real world. We detail several important innovations to localization accuracy and mapping resiliency distributed throughout a typical LiDAR SLAM pipeline to comprehensively increase algorithmic speed, accuracy, and robustness. In addition, we discuss insights gained from our ground-up approach while implementing such a complex system for real-time state estimation on resource-constrained systems, and we experimentally show the increased performance of our method as compared to the current state-of-the-art on both public benchmark and self-collected datasets.