 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCRAMPPI: Efficient Contingency Planning for Mobile Robot Navigation via Hamilton-Jacobi Reachability
Mar 27, 2026Autonomous robots commonly aim to complete a nominal behavior while minimizing a cost; this leaves them vulnerable to failure or unplanned scenarios, where a backup or contingency plan to a safe set is needed to avoid a total mission failure. This is formalized as a trajectory optimization problem over the nominal cost with a safety constraint: from any point along the nominal plan, a feasible trajectory to a designated safe set must exist. Previous methods either relax this hard constraint, or use an expensive sampling-based strategy to optimize for this constraint. Instead, we formalize this requirement as a reach-avoid problem and leverage Hamilton-Jacobi (HJ) reachability analysis to certify contingency feasibility. By computing the value function of our safe-set's backward reachable set online as the environment is revealed and integrating it with a sampling based planner (MPPI) via resampling based rollouts, we guarantee satisfaction of the hard constraint while greatly increasing sampling efficiency. Finally, we present simulated and hardware experiments demonstrating our algorithm generating nominal and contingency plans in real time on a mobile robot in an adversarial evasion task.
Practical and Performant Enhancements for Maximization of Algebraic Connectivity
Nov 11, 2025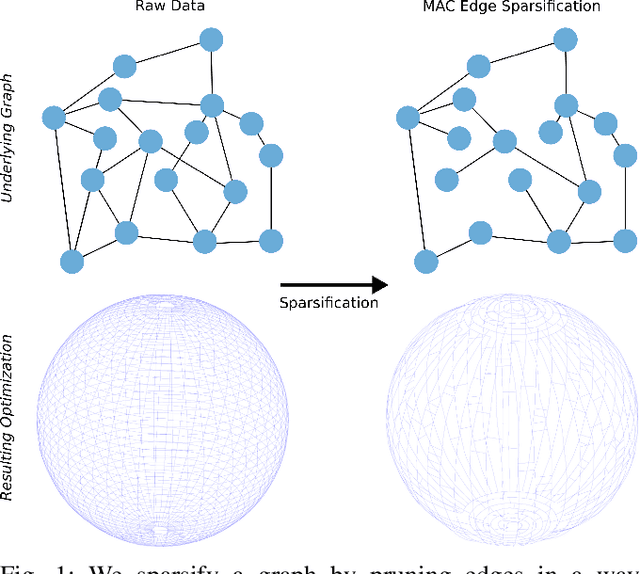
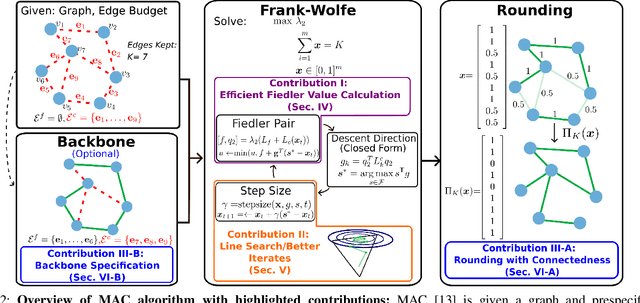
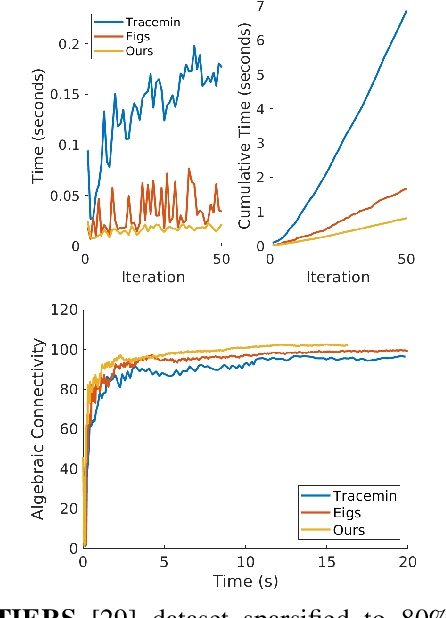
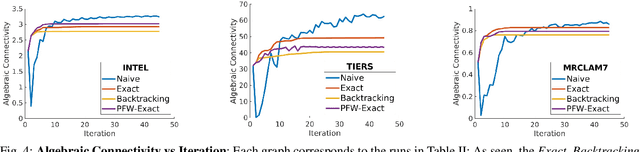
Long-term state estimation over graphs remains challenging as current graph estimation methods scale poorly on large, long-term graphs. To address this, our work advances a current state-of-the-art graph sparsification algorithm, maximizing algebraic connectivity (MAC). MAC is a sparsification method that preserves estimation performance by maximizing the algebraic connectivity, a spectral graph property that is directly connected to the estimation error. Unfortunately, MAC remains computationally prohibitive for online use and requires users to manually pre-specify a connectivity-preserving edge set. Our contributions close these gaps along three complementary fronts: we develop a specialized solver for algebraic connectivity that yields an average 2x runtime speedup; we investigate advanced step size strategies for MAC's optimization procedure to enhance both convergence speed and solution quality; and we propose automatic schemes that guarantee graph connectivity without requiring manual specification of edges. Together, these contributions make MAC more scalable, reliable, and suitable for real-time estimation applications.
Learning Smooth State-Dependent Traversability from Dense Point Clouds
Jun 04, 2025A key open challenge in off-road autonomy is that the traversability of terrain often depends on the vehicle's state. In particular, some obstacles are only traversable from some orientations. However, learning this interaction by encoding the angle of approach as a model input demands a large and diverse training dataset and is computationally inefficient during planning due to repeated model inference. To address these challenges, we present SPARTA, a method for estimating approach angle conditioned traversability from point clouds. Specifically, we impose geometric structure into our network by outputting a smooth analytical function over the 1-Sphere that predicts risk distribution for any angle of approach with minimal overhead and can be reused for subsequent queries. The function is composed of Fourier basis functions, which has important advantages for generalization due to their periodic nature and smoothness. We demonstrate SPARTA both in a high-fidelity simulation platform, where our model achieves a 91\% success rate crossing a 40m boulder field (compared to 73\% for the baseline), and on hardware, illustrating the generalization ability of the model to real-world settings.
Contingency Constrained Planning with MPPI within MPPI
Dec 13, 2024
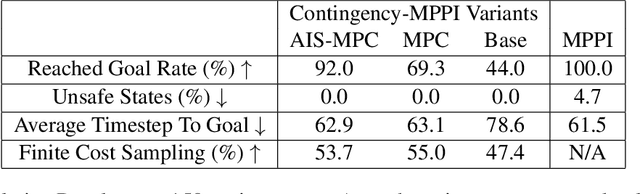


For safety, autonomous systems must be able to consider sudden changes and enact contingency plans appropriately. State-of-the-art methods currently find trajectories that balance between nominal and contingency behavior, or plan for a singular contingency plan; however, this does not guarantee that the resulting plan is safe for all time. To address this research gap, this paper presents Contingency-MPPI, a data-driven optimization-based strategy that embeds contingency planning inside a nominal planner. By learning to approximate the optimal contingency-constrained control sequence with adaptive importance sampling, the proposed method's sampling efficiency is further improved with initializations from a lightweight path planner and trajectory optimizer. Finally, we present simulated and hardware experiments demonstrating our algorithm generating nominal and contingency plans in real time on a mobile robot.
LiDAR Inertial Odometry And Mapping Using Learned Registration-Relevant Features
Oct 03, 2024SLAM is an important capability for many autonomous systems, and modern LiDAR-based methods offer promising performance. However, for long duration missions, existing works that either operate directly the full pointclouds or on extracted features face key tradeoffs in accuracy and computational efficiency (e.g., memory consumption). To address these issues, this paper presents DFLIOM with several key innovations. Unlike previous methods that rely on handcrafted heuristics and hand-tuned parameters for feature extraction, we propose a learning-based approach that select points relevant to LiDAR SLAM pointcloud registration. Furthermore, we extend our prior work DLIOM with the learned feature extractor and observe our method enables similar or even better localization performance using only about 20\% of the points in the dense point clouds. We demonstrate that DFLIOM performs well on multiple public benchmarks, achieving a 2.4\% decrease in localization error and 57.5\% decrease in memory usage compared to state-of-the-art methods (DLIOM). Although extracting features with the proposed network requires extra time, it is offset by the faster processing time downstream, thus maintaining real-time performance using 20Hz LiDAR on our hardware setup. The effectiveness of our learning-based feature extraction module is further demonstrated through comparison with several handcrafted feature extractors.