 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptMap: Geometric Map Distillation via Submodular Maximization
Dec 08, 2025


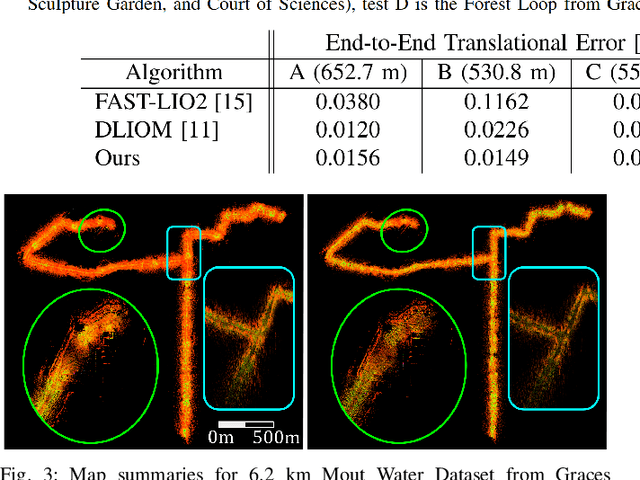
Autonomous robots rely on geometric maps to inform a diverse set of perception and decision-making algorithms. As autonomy requires reasoning and planning on multiple scales of the environment, each algorithm may require a different map for optimal performance. Light Detection And Ranging (LiDAR) sensors generate an abundance of geometric data to satisfy these diverse requirements, but selecting informative, size-constrained maps is computationally challenging as it requires solving an NP-hard combinatorial optimization. In this work we present OptMap: a geometric map distillation algorithm which achieves real-time, application-specific map generation via multiple theoretical and algorithmic innovations. A central feature is the maximization of set functions that exhibit diminishing returns, i.e., submodularity, using polynomial-time algorithms with provably near-optimal solutions. We formulate a novel submodular reward function which quantifies informativeness, reduces input set sizes, and minimizes bias in sequentially collected datasets. Further, we propose a dynamically reordered streaming submodular algorithm which improves empirical solution quality and addresses input order bias via an online approximation of the value of all scans. Testing was conducted on open-source and custom datasets with an emphasis on long-duration mapping sessions, highlighting OptMap's minimal computation requirements. Open-source ROS1 and ROS2 packages are available and can be used alongside any LiDAR SLAM algorithm.
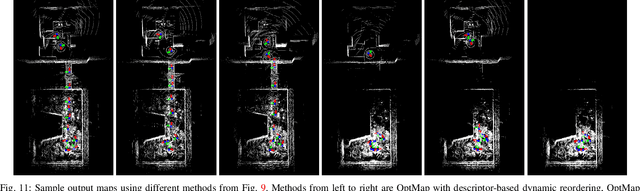
Submodular Optimization for Keyframe Selection & Usage in SLAM
Oct 08, 2024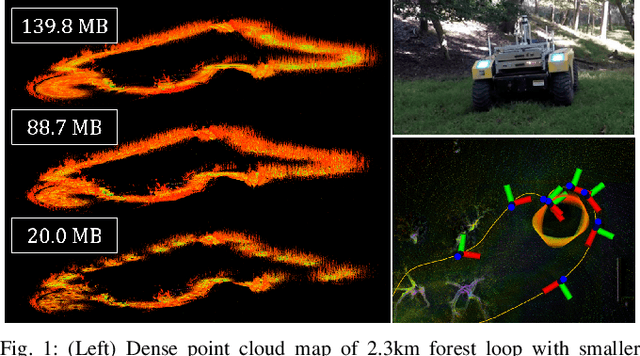

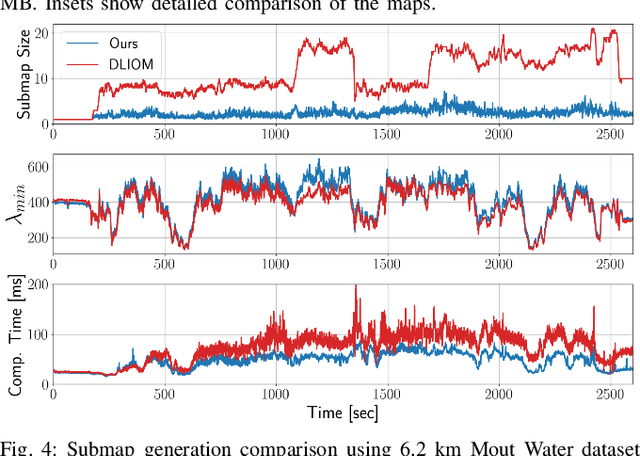
Keyframes are LiDAR scans saved for future reference in Simultaneous Localization And Mapping (SLAM), but despite their central importance most algorithms leave choices of which scans to save and how to use them to wasteful heuristics. This work proposes two novel keyframe selection strategies for localization and map summarization, as well as a novel approach to submap generation which selects keyframes that best constrain localization. Our results show that online keyframe selection and submap generation reduce the number of saved keyframes and improve per scan computation time without compromising localization performance. We also present a map summarization feature for quickly capturing environments under strict map size constraints.
LiDAR Inertial Odometry And Mapping Using Learned Registration-Relevant Features
Oct 03, 2024SLAM is an important capability for many autonomous systems, and modern LiDAR-based methods offer promising performance. However, for long duration missions, existing works that either operate directly the full pointclouds or on extracted features face key tradeoffs in accuracy and computational efficiency (e.g., memory consumption). To address these issues, this paper presents DFLIOM with several key innovations. Unlike previous methods that rely on handcrafted heuristics and hand-tuned parameters for feature extraction, we propose a learning-based approach that select points relevant to LiDAR SLAM pointcloud registration. Furthermore, we extend our prior work DLIOM with the learned feature extractor and observe our method enables similar or even better localization performance using only about 20\% of the points in the dense point clouds. We demonstrate that DFLIOM performs well on multiple public benchmarks, achieving a 2.4\% decrease in localization error and 57.5\% decrease in memory usage compared to state-of-the-art methods (DLIOM). Although extracting features with the proposed network requires extra time, it is offset by the faster processing time downstream, thus maintaining real-time performance using 20Hz LiDAR on our hardware setup. The effectiveness of our learning-based feature extraction module is further demonstrated through comparison with several handcrafted feature extractors.
Multi-Robot Task Assignment and Path Finding for Time-Sensitive Missions with Online Task Generation
Oct 09, 2023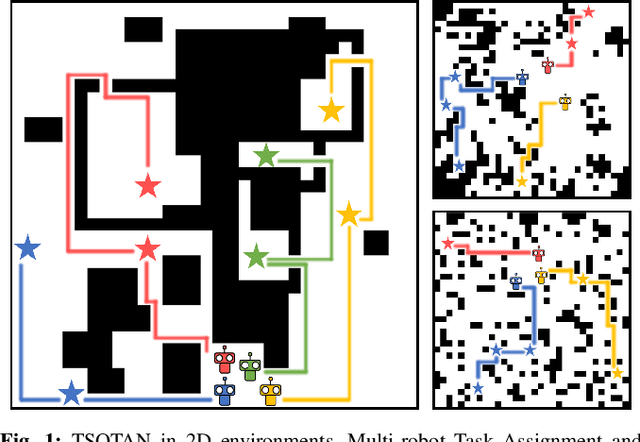


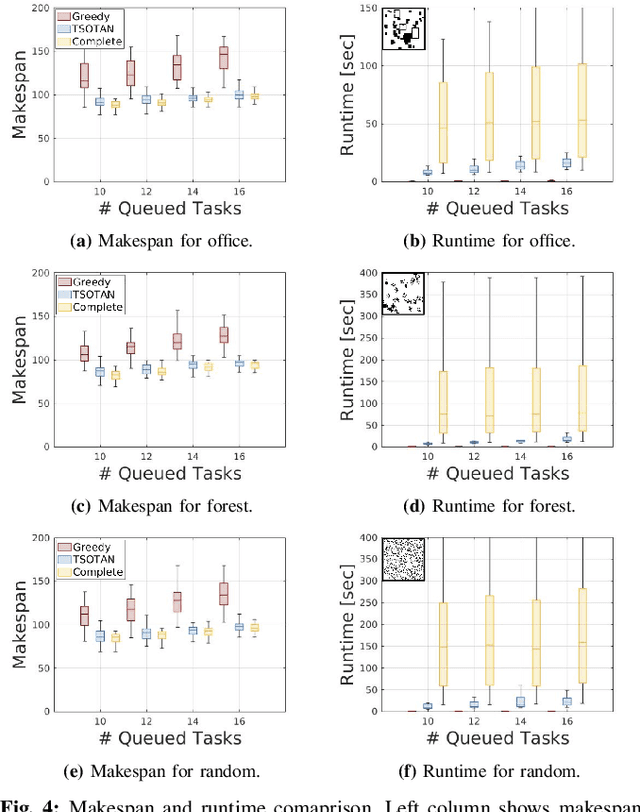
Executing time-sensitive multi-robot missions involves two distinct problems: Multi-Robot Task Assignment (MRTA) and Multi-Agent Path Finding (MAPF). Computing safe paths that complete every task and minimize the time to mission completion, or makespan, is a significant computational challenge even for small teams. In many missions, tasks can be generated during execution which is typically handled by either recomputing task assignments and paths from scratch, or by modifying existing plans using approximate approaches. While performing task reassignment and path finding from scratch produces theoretically optimal results, the computational load makes it too expensive for online implementation. In this work, we present Time-Sensitive Online Task Assignment and Navigation (TSOTAN), a framework which can quickly incorporate online generated tasks while guaranteeing bounded suboptimal task assignment makespans. It does this by assessing the quality of partial task reassignments and only performing a complete reoptimization when the makespan exceeds a user specified suboptimality bound. Through experiments in 2D environments we demonstrate TSOTAN's ability to produce quality solutions with computation times suitable for online implementation.