 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Verifiable Control Policies Using Relaxed Verification
Apr 23, 2025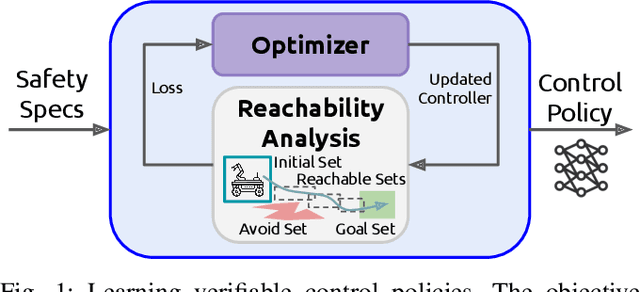
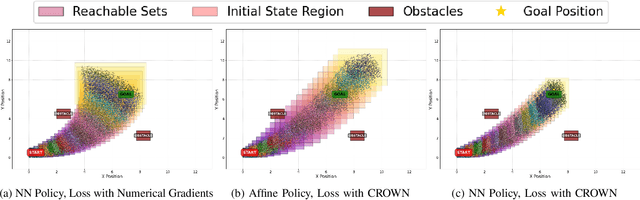
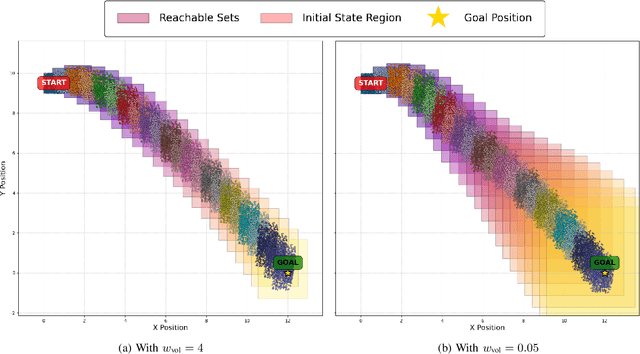
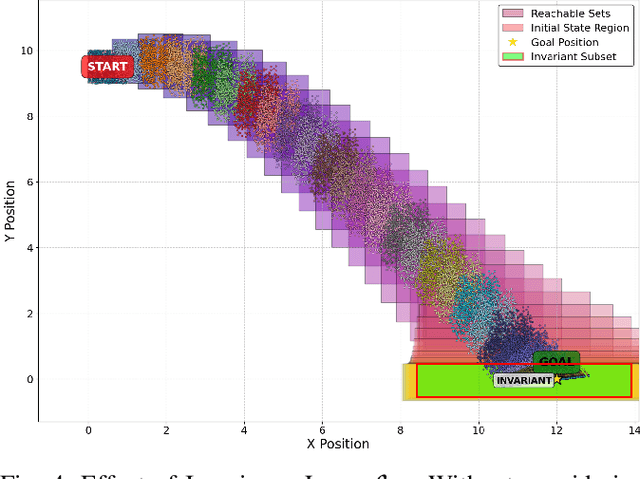
To provide safety guarantees for learning-based control systems, recent work has developed formal verification methods to apply after training ends. However, if the trained policy does not meet the specifications, or there is conservatism in the verification algorithm, establishing these guarantees may not be possible. Instead, this work proposes to perform verification throughout training to ultimately aim for policies whose properties can be evaluated throughout runtime with lightweight, relaxed verification algorithms. The approach is to use differentiable reachability analysis and incorporate new components into the loss function. Numerical experiments on a quadrotor model and unicycle model highlight the ability of this approach to lead to learned control policies that satisfy desired reach-avoid and invariance specifications.
Contingency Constrained Planning with MPPI within MPPI
Dec 13, 2024
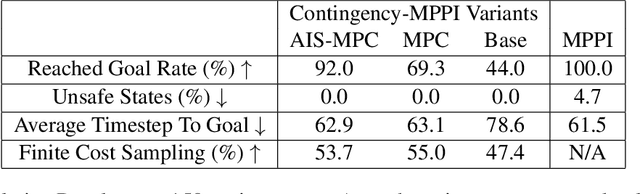


For safety, autonomous systems must be able to consider sudden changes and enact contingency plans appropriately. State-of-the-art methods currently find trajectories that balance between nominal and contingency behavior, or plan for a singular contingency plan; however, this does not guarantee that the resulting plan is safe for all time. To address this research gap, this paper presents Contingency-MPPI, a data-driven optimization-based strategy that embeds contingency planning inside a nominal planner. By learning to approximate the optimal contingency-constrained control sequence with adaptive importance sampling, the proposed method's sampling efficiency is further improved with initializations from a lightweight path planner and trajectory optimizer. Finally, we present simulated and hardware experiments demonstrating our algorithm generating nominal and contingency plans in real time on a mobile robot.