 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirect LiDAR-Inertial Odometry and Mapping: Perceptive and Connective SLAM
May 03, 2023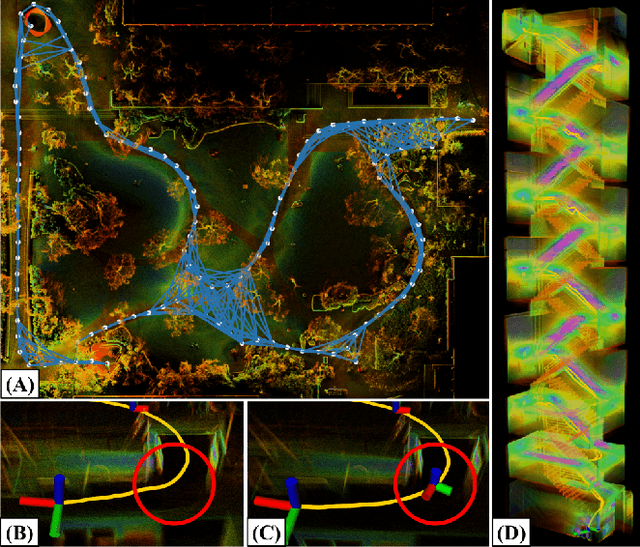

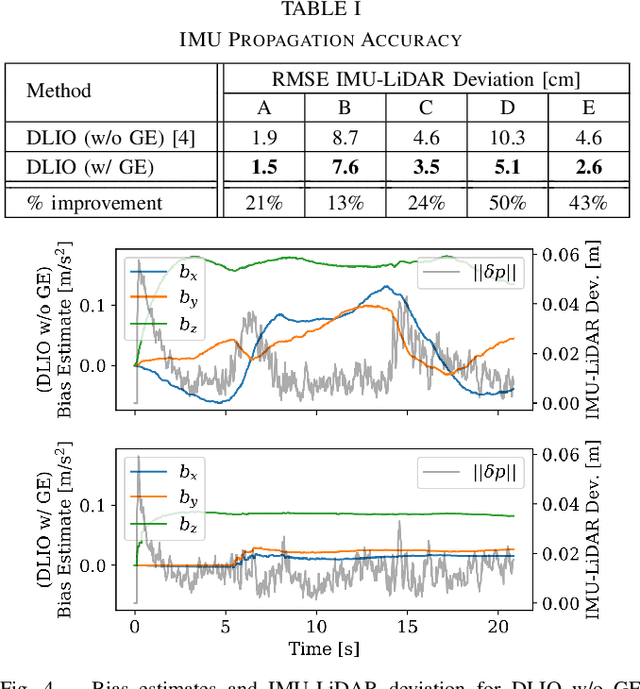
This paper presents Direct LiDAR-Inertial Odometry and Mapping (DLIOM), a robust SLAM algorithm with an explicit focus on computational efficiency, operational reliability, and real-world efficacy. DLIOM contains several key algorithmic innovations in both the front-end and back-end subsystems to design a resilient LiDAR-inertial architecture that is perceptive to the environment and produces accurate localization and high-fidelity 3D mapping for autonomous robotic platforms. Our ideas spawned after a deep investigation into modern LiDAR SLAM systems and their inabilities to generalize across different operating environments, in which we address several common algorithmic failure points by means of proactive safe-guards to provide long-term operational reliability in the unstructured real world. We detail several important innovations to localization accuracy and mapping resiliency distributed throughout a typical LiDAR SLAM pipeline to comprehensively increase algorithmic speed, accuracy, and robustness. In addition, we discuss insights gained from our ground-up approach while implementing such a complex system for real-time state estimation on resource-constrained systems, and we experimentally show the increased performance of our method as compared to the current state-of-the-art on both public benchmark and self-collected datasets.
Joint On-Manifold Gravity and Accelerometer Intrinsics Estimation
Mar 06, 2023

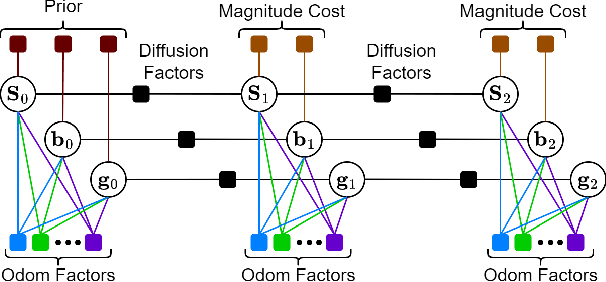
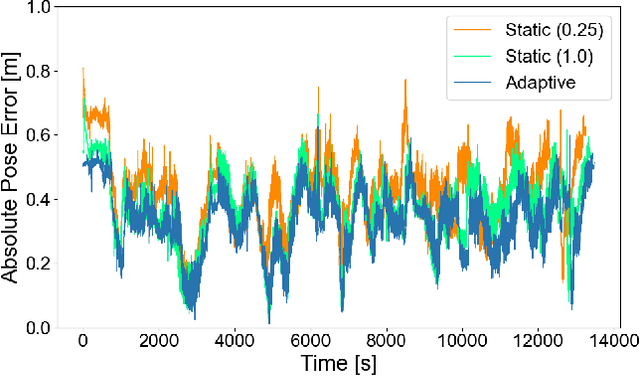
Aligning a robot's trajectory or map to the inertial frame is a critical capability that is often difficult to do accurately even though inertial measurement units (IMUs) can observe absolute roll and pitch with respect to gravity. Accelerometer biases and scale factor errors from the IMU's initial calibration are often the major source of inaccuracies when aligning the robot's odometry frame with the inertial frame, especially for low-grade IMUs. Practically, one would simultaneously estimate the true gravity vector, accelerometer biases, and scale factor to improve measurement quality but these quantities are not observable unless the IMU is sufficiently excited. While several methods estimate accelerometer bias and gravity, they do not explicitly address the observability issue nor do they estimate scale factor. We present a fixed-lag factor-graph-based estimator to address both of these issues. In addition to estimating accelerometer scale factor, our method mitigates limited observability by optimizing over a time window an order of magnitude larger than existing methods with significantly lower computational burden. The proposed method, which estimates accelerometer intrinsics and gravity separately from the other states, is enabled by a novel, velocity-agnostic measurement model for intrinsics and gravity, as well as a new method for gravity vector optimization on S2. Accurate IMU state prediction, gravity-alignment, and roll/pitch drift correction are experimentally demonstrated on public and self-collected datasets in diverse environments.
Direct LiDAR-Inertial Odometry
Mar 18, 2022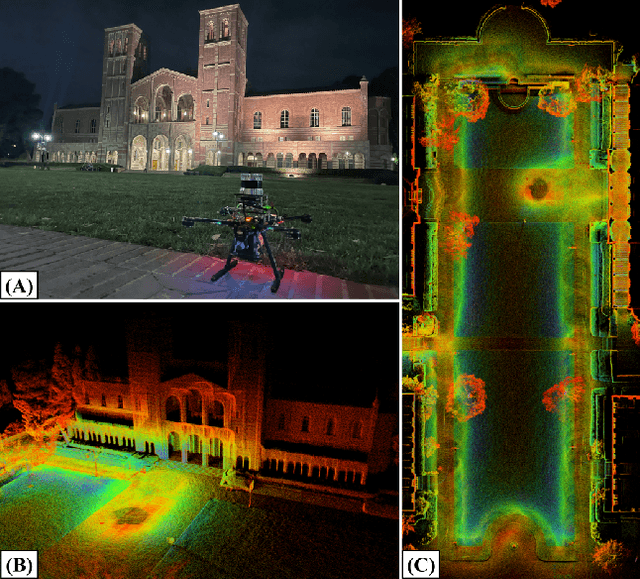
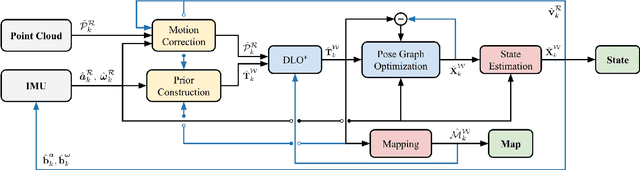
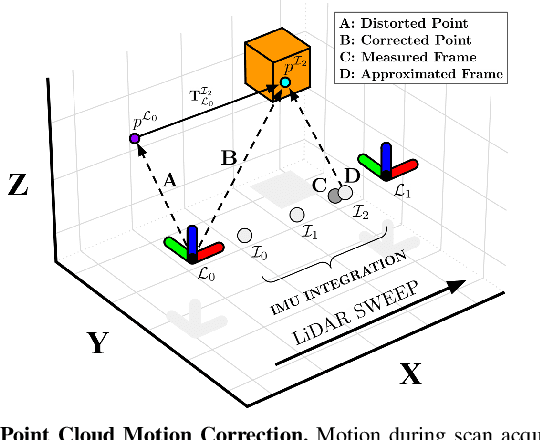
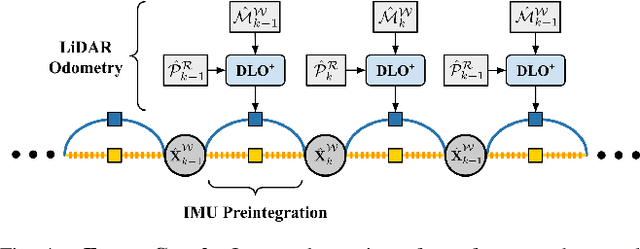
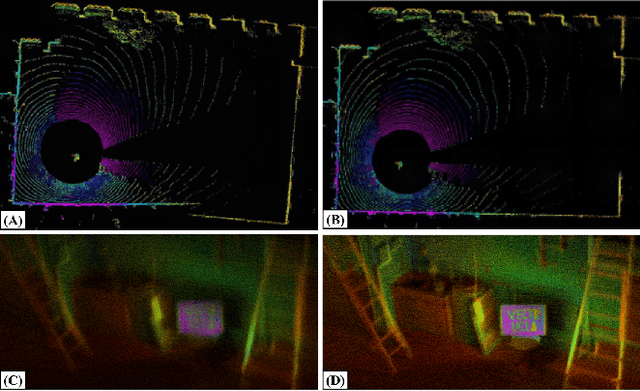
This paper proposes a new LiDAR-inertial odometry framework that generates accurate state estimates and detailed maps in real-time on resource-constrained mobile robots. Our Direct LiDAR-Inertial Odometry (DLIO) algorithm utilizes a hybrid architecture that combines the benefits of loosely-coupled and tightly-coupled IMU integration to enhance reliability and real-time performance while improving accuracy. The proposed architecture has two key elements. The first is a fast keyframe-based LiDAR scan-matcher that builds an internal map by registering dense point clouds to a local submap with a translational and rotational prior generated by a nonlinear motion model. The second is a factor graph and high-rate propagator that fuses the output of the scan-matcher with preintegrated IMU measurements for up-to-date pose, velocity, and bias estimates. These estimates enable us to accurately deskew the next point cloud using a nonlinear kinematic model for precise motion correction, in addition to initializing the next scan-to-map optimization prior. We demonstrate DLIO's superior localization accuracy, map quality, and lower computational overhead by comparing it to the state-of-the-art using multiple benchmark, public, and self-collected datasets on both consumer and hobby-grade hardware.