 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirect LiDAR-Inertial Odometry
Paper and Code
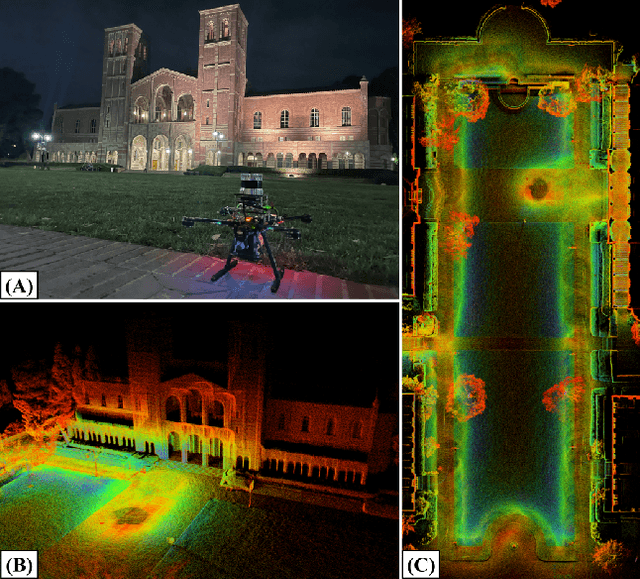
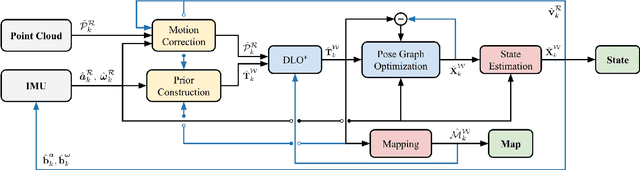
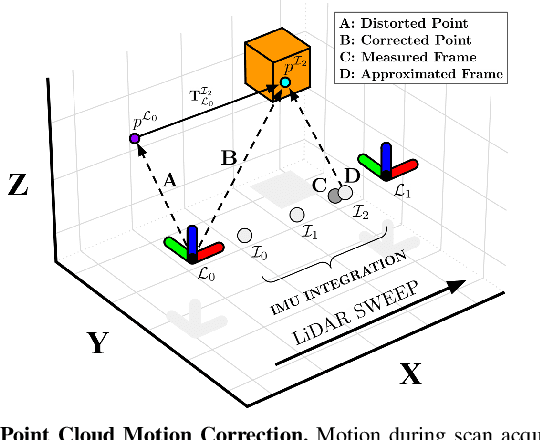
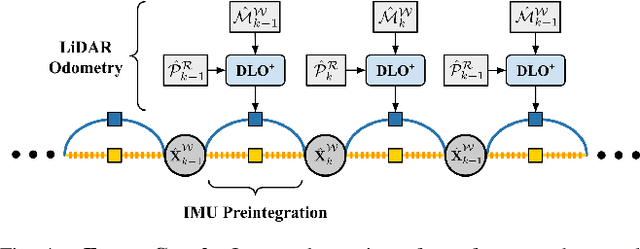
This paper proposes a new LiDAR-inertial odometry framework that generates accurate state estimates and detailed maps in real-time on resource-constrained mobile robots. Our Direct LiDAR-Inertial Odometry (DLIO) algorithm utilizes a hybrid architecture that combines the benefits of loosely-coupled and tightly-coupled IMU integration to enhance reliability and real-time performance while improving accuracy. The proposed architecture has two key elements. The first is a fast keyframe-based LiDAR scan-matcher that builds an internal map by registering dense point clouds to a local submap with a translational and rotational prior generated by a nonlinear motion model. The second is a factor graph and high-rate propagator that fuses the output of the scan-matcher with preintegrated IMU measurements for up-to-date pose, velocity, and bias estimates. These estimates enable us to accurately deskew the next point cloud using a nonlinear kinematic model for precise motion correction, in addition to initializing the next scan-to-map optimization prior. We demonstrate DLIO's superior localization accuracy, map quality, and lower computational overhead by comparing it to the state-of-the-art using multiple benchmark, public, and self-collected datasets on both consumer and hobby-grade hardware.