 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact-Prioritized Planning of Impact-Resilient Aerial Robots with an Integrated Compliant Arm
May 24, 2023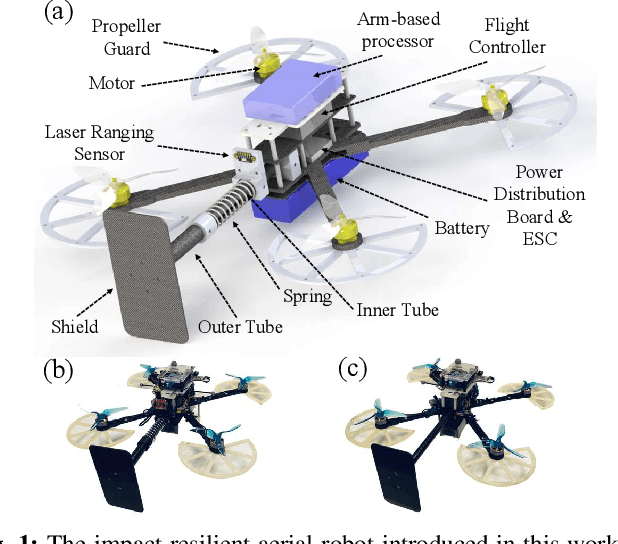
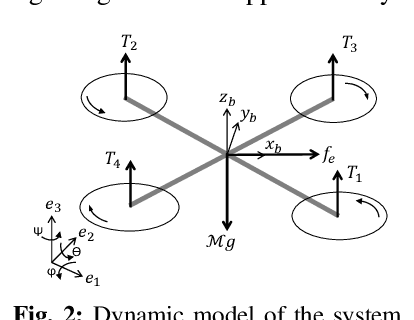
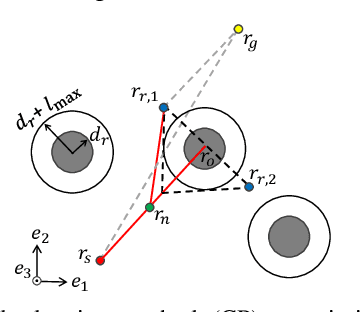
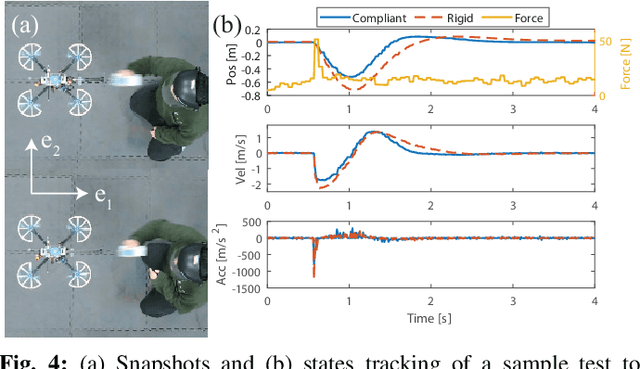
The article develops an impact-resilient aerial robot (s-ARQ) equipped with a compliant arm to sense contacts and reduce collision impact and featuring a real-time contact force estimator and a non-linear motion controller to handle collisions while performing aggressive maneuvers and stabilize from high-speed wall collisions. Further, a new collision-inclusive planning method that aims to prioritize contacts to facilitate aerial robot navigation in cluttered environments is proposed. A range of simulated and physical experiments demonstrate key benefits of the robot and the contact-prioritized (CP) planner. Experimental results show that the compliant robot has only a $4\%$ weight increase but around $40\%$ impact reduction in drop tests and wall collision tests. s-ARQ can handle collisions while performing aggressive maneuvers and stabilize from high-speed wall collisions at $3.0$ m/s with a success rate of $100\%$. Our proposed compliant robot and contact-prioritized planning method can accelerate computation time while having shorter trajectory time and larger clearances compared to A$^\ast$ and RRT$^\ast$ planners with velocity constraints. Online planning tests in partially-known environments further demonstrate the preliminary feasibility of our method to apply in practical use cases.
Online Search-based Collision-inclusive Motion Planning and Control for Impact-resilient Mobile Robots
Oct 05, 2022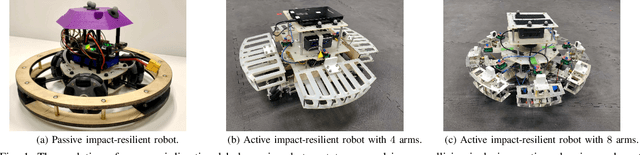
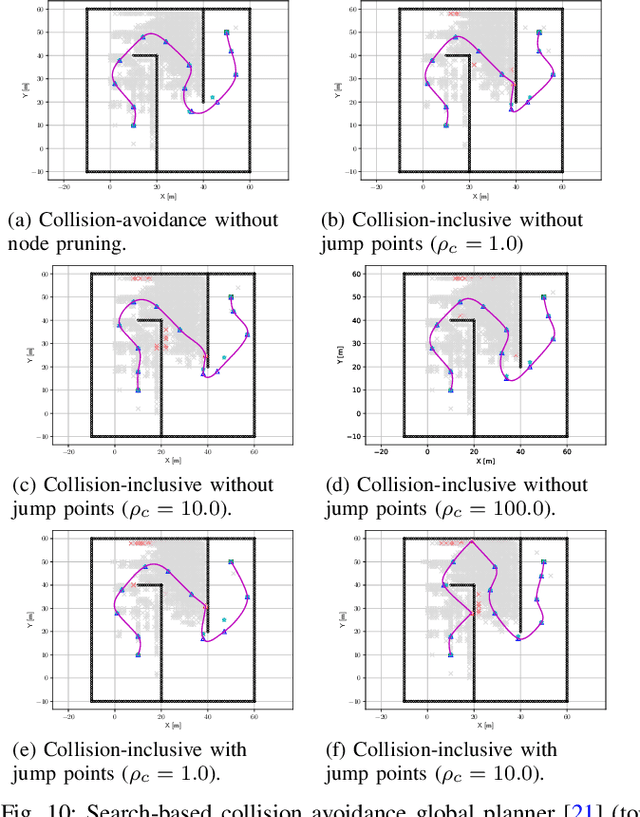
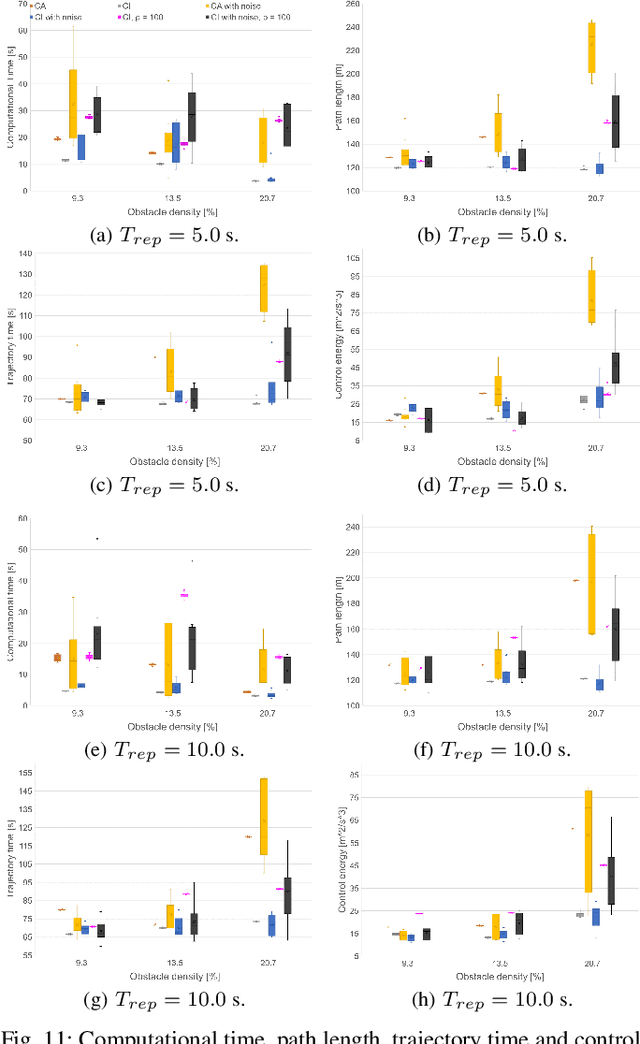
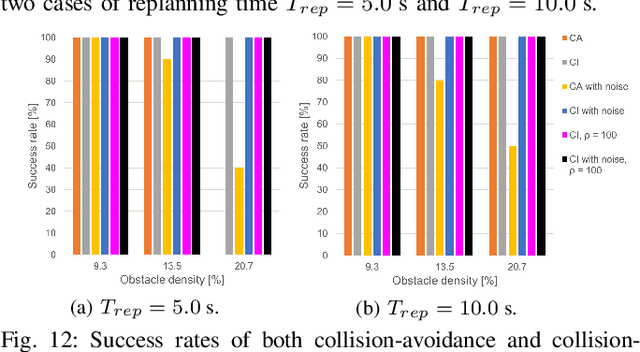
This paper focuses on the emerging paradigm shift of collision-inclusive motion planning and control for impact-resilient mobile robots, and develops a unified hierarchical framework for navigation in unknown and partially-observable cluttered spaces. At the lower-level, we develop a deformation recovery control and trajectory replanning strategy that handles collisions that may occur at run-time, locally. The low-level system actively detects collisions (via embedded Hall effect sensors on a mobile robot built in-house), enables the robot to recover from them, and locally adjusts the post-impact trajectory. Then, at the higher-level, we propose a search-based planning algorithm to determine how to best utilize potential collisions to improve certain metrics, such as control energy and computational time. Our method builds upon A* with jump points. We generate a novel heuristic function, and a collision checking and adjustment technique, thus making the A* algorithm converge faster to reach the goal by exploiting and utilizing possible collisions. The overall hierarchical framework generated by combining the global A* algorithm and the local deformation recovery and replanning strategy, as well as individual components of this framework, are tested extensively both in simulation and experimentally. An ablation study draws links to related state-of-the-art search-based collision-avoidance planners (for the overall framework), as well as search-based collision-avoidance and sampling-based collision-inclusive global planners (for the higher level). Results demonstrate our method's efficacy for collision-inclusive motion planning and control in unknown environments with isolated obstacles for a class of impact-resilient robots operating in 2D.
Deformation Recovery Control and Post-Impact Trajectory Replanning for Collision-Resilient Mobile Robots
Aug 04, 2021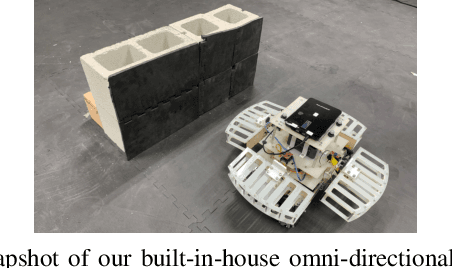
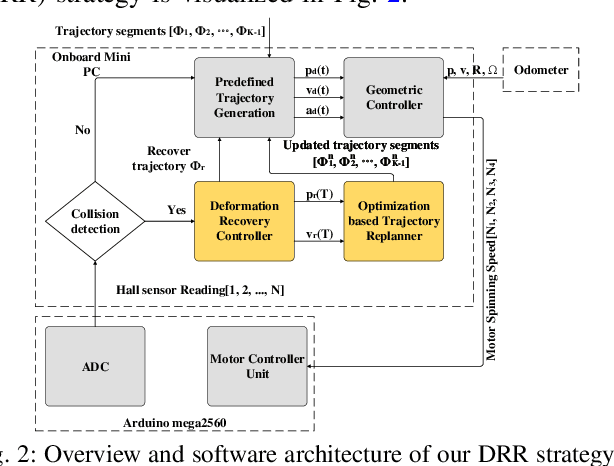
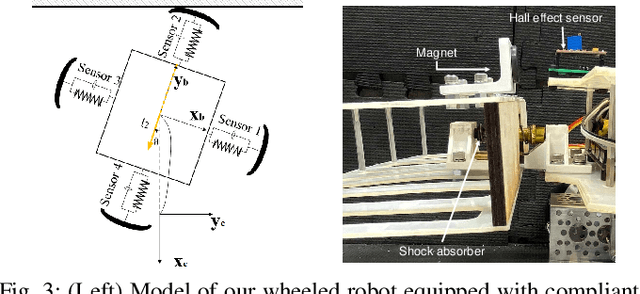
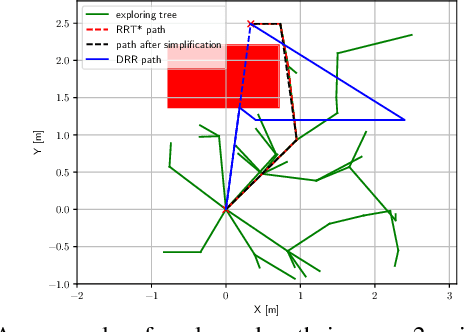
The paper focuses on collision-inclusive motion planning for impact-resilient mobile robots. We propose a new deformation recovery and replanning strategy to handle collisions that may occur at run-time. Contrary to collision avoidance methods that generate trajectories only in conservative local space or require collision checking that has high computational cost, our method directly generates (local) trajectories with imposing only waypoint constraints. If a collision occurs, our method then estimates the post-impact state and computes from there an intermediate waypoint to recover from the collision. To achieve so, we develop two novel components: 1) a deformation recovery controller that optimizes the robot's states during post-impact recovery phase, and 2) a post-impact trajectory replanner that adjusts the next waypoint with the information from the collision for the robot to pass through and generates a polynomial-based minimum effort trajectory. The proposed strategy is evaluated experimentally with an omni-directional impact-resilient wheeled robot. The robot is designed in house, and it can perceive collisions with the aid of Hall effect sensors embodied between the robot's main chassis and a surrounding deflection ring-like structure.
Motion Planning for Collision-resilient Mobile Robots in Obstacle-cluttered Unknown Environments with Risk Reward Trade-offs
Sep 04, 2020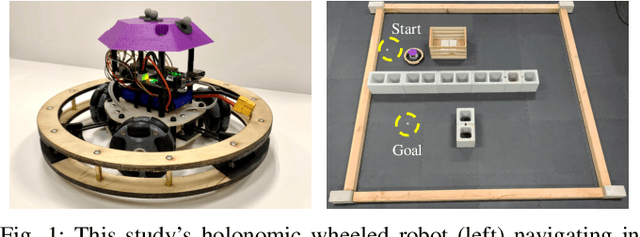
Collision avoidance in unknown obstacle-cluttered environments may not always be feasible. This paper focuses on an emerging paradigm shift in which potential collisions with the environment can be harnessed instead of being avoided altogether. To this end, we introduce a new sampling-based online planning algorithm that can explicitly handle the risk of colliding with the environment and can switch between collision avoidance and collision exploitation. Central to the planner's capabilities is a novel joint optimization function that evaluates the effect of possible collisions using a reflection model. This way, the planner can make deliberate decisions to collide with the environment if such collision is expected to help the robot make progress toward its goal. To make the algorithm online, we present a state expansion pruning technique that significantly reduces the search space while ensuring completeness. The proposed algorithm is evaluated experimentally with a built-in-house holonomic wheeled robot that can withstand collisions. We perform an extensive parametric study to investigate trade-offs between (user-tuned) levels of risk, deliberate collision decision making, and trajectory statistics such as time to reach the goal and path length.