 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Search-based Collision-inclusive Motion Planning and Control for Impact-resilient Mobile Robots
Oct 05, 2022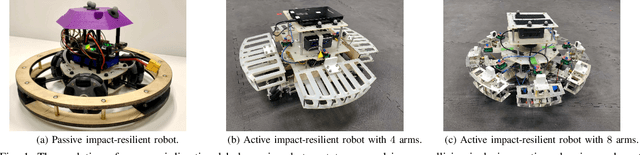
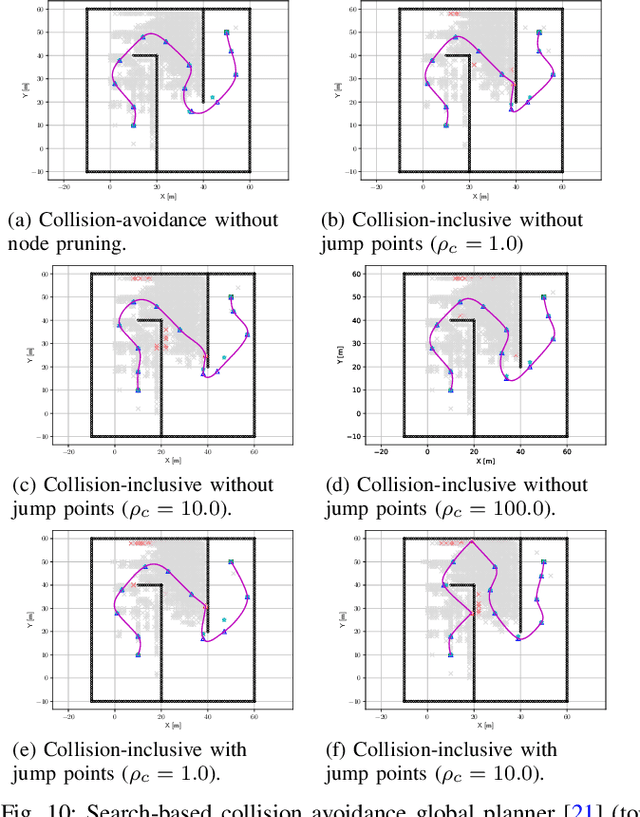
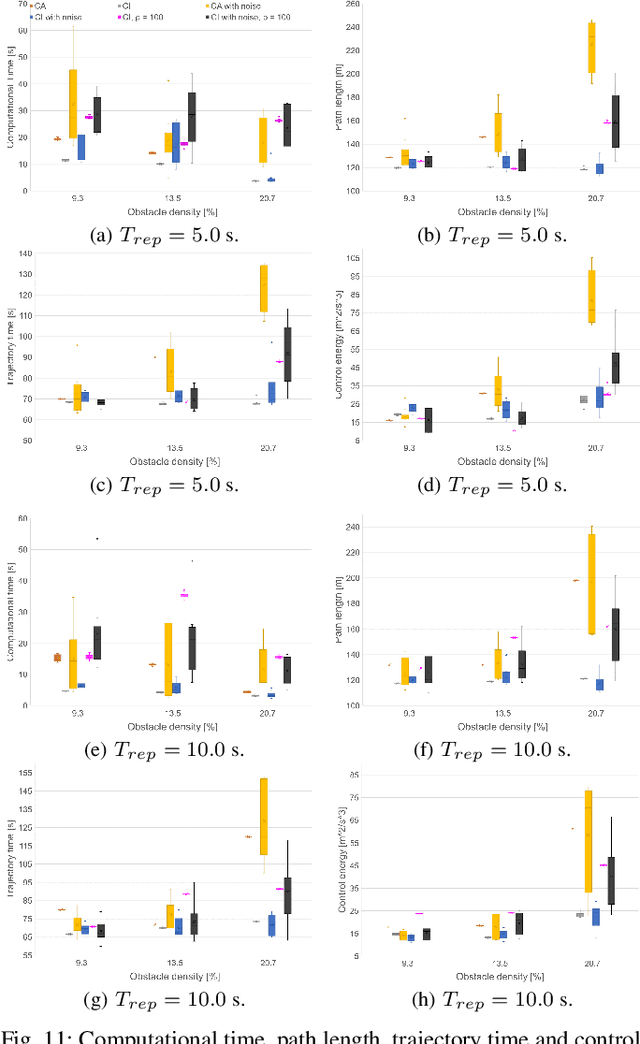
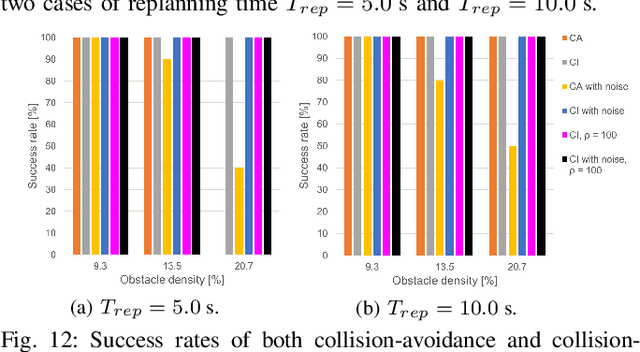
This paper focuses on the emerging paradigm shift of collision-inclusive motion planning and control for impact-resilient mobile robots, and develops a unified hierarchical framework for navigation in unknown and partially-observable cluttered spaces. At the lower-level, we develop a deformation recovery control and trajectory replanning strategy that handles collisions that may occur at run-time, locally. The low-level system actively detects collisions (via embedded Hall effect sensors on a mobile robot built in-house), enables the robot to recover from them, and locally adjusts the post-impact trajectory. Then, at the higher-level, we propose a search-based planning algorithm to determine how to best utilize potential collisions to improve certain metrics, such as control energy and computational time. Our method builds upon A* with jump points. We generate a novel heuristic function, and a collision checking and adjustment technique, thus making the A* algorithm converge faster to reach the goal by exploiting and utilizing possible collisions. The overall hierarchical framework generated by combining the global A* algorithm and the local deformation recovery and replanning strategy, as well as individual components of this framework, are tested extensively both in simulation and experimentally. An ablation study draws links to related state-of-the-art search-based collision-avoidance planners (for the overall framework), as well as search-based collision-avoidance and sampling-based collision-inclusive global planners (for the higher level). Results demonstrate our method's efficacy for collision-inclusive motion planning and control in unknown environments with isolated obstacles for a class of impact-resilient robots operating in 2D.
An Integrated Actuation-Perception Framework for Robotic Leaf Retrieval: Detection, Localization, and Cutting
Aug 09, 2022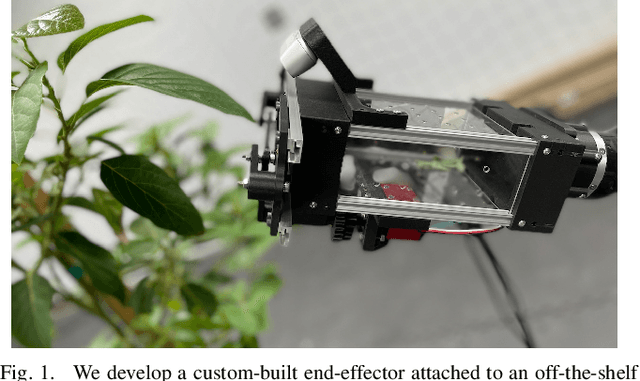
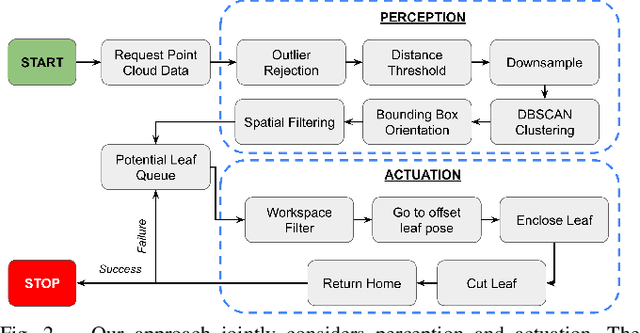
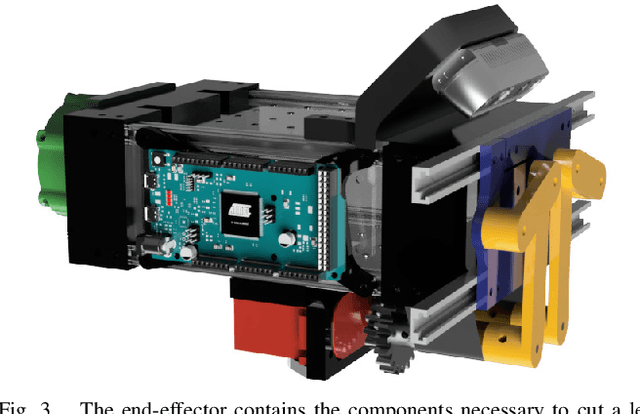
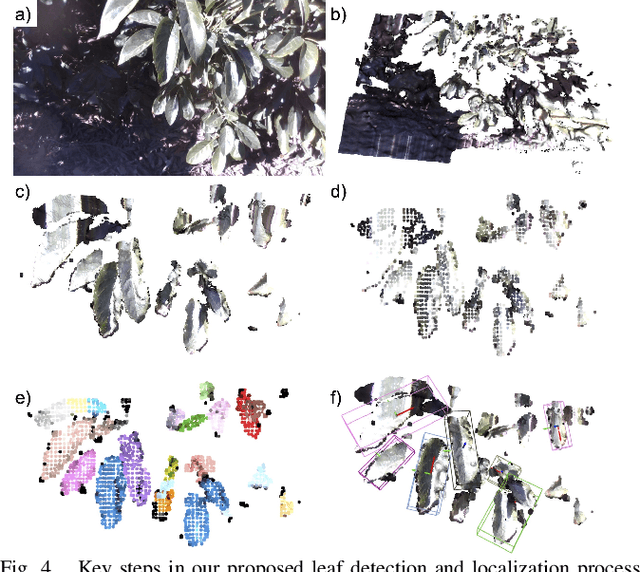
Contemporary robots in precision agriculture focus primarily on automated harvesting or remote sensing to monitor crop health. Comparatively less work has been performed with respect to collecting physical leaf samples in the field and retaining them for further analysis. Typically, orchard growers manually collect sample leaves and utilize them for stem water potential measurements to analyze tree health and determine irrigation routines. While this technique benefits orchard management, the process of collecting, assessing, and interpreting measurements requires significant human labor and often leads to infrequent sampling. Automated sampling can provide highly accurate and timely information to growers. The first step in such automated in-situ leaf analysis is identifying and cutting a leaf from a tree. This retrieval process requires new methods for actuation and perception. We present a technique for detecting and localizing candidate leaves using point cloud data from a depth camera. This technique is tested on both indoor and outdoor point clouds from avocado trees. We then use a custom-built leaf-cutting end-effector on a 6-DOF robotic arm to test the proposed detection and localization technique by cutting leaves from an avocado tree. Experimental testing with a real avocado tree demonstrates our proposed approach can enable our mobile manipulator and custom end-effector system to successfully detect, localize, and cut leaves.
Development and Testing of a Smart Bin toward Automated Rearing of Black Soldier Fly Larvae
Jul 09, 2022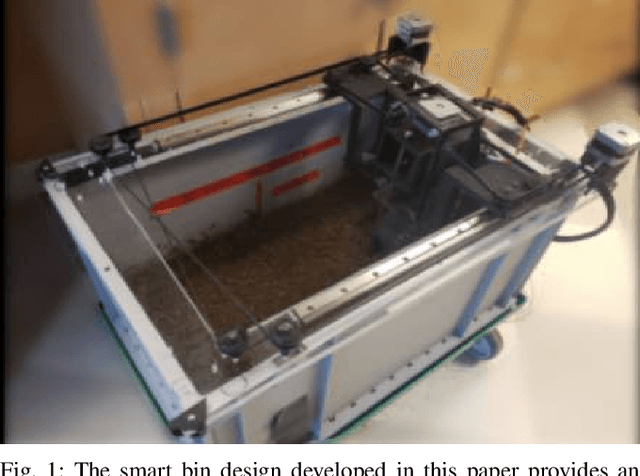
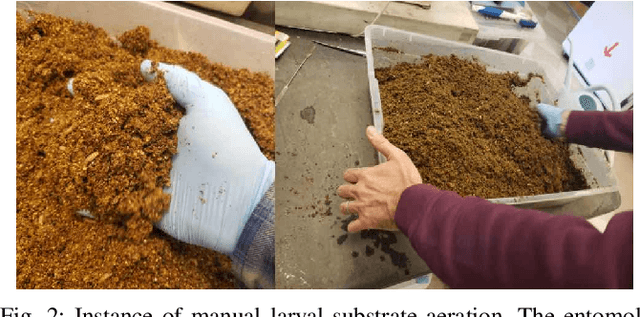
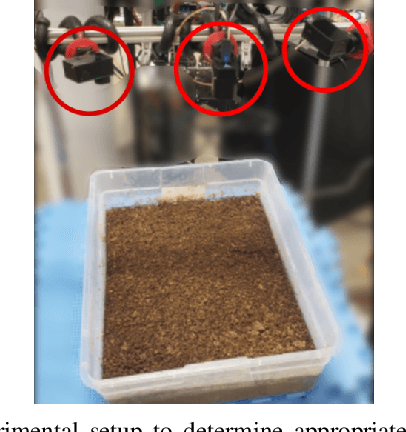
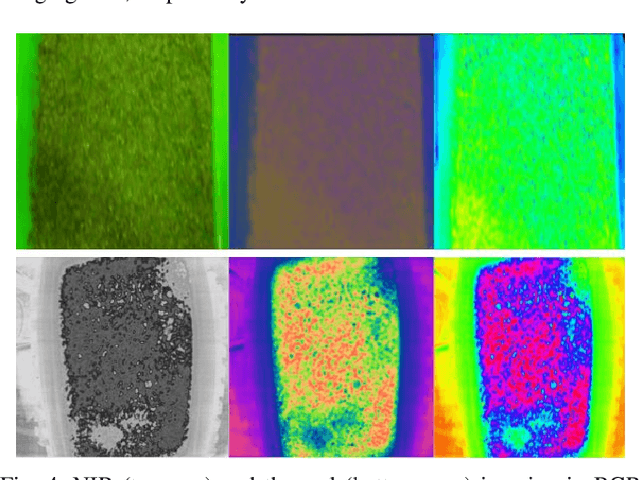
The Black Soldier Fly (BSF), can be an effective alternative to traditional disposal of food and agricultural waste (biowaste) such as landfills because its larvae are able to quickly transform biowaste into ready-to-use biomass. However, several challenges remain to ensure that BSF farming is economically viable at different scales and can be widely implemented. Manual labor is required to ensure optimal conditions to rear the larvae, from aerating the feeding substrate to monitoring abiotic conditions during the growth cycle. This paper introduces a proof-of-concept automated method of rearing BSF larvae to ensure optimal growing conditions while at the same time reducing manual labor. We retrofit existing BSF rearing bins with a "smart lid," named as such due to the hot-swappable nature of the lid with multiple bins. The system automatically aerates the larvae-diet substrate and provides bio-information of the larvae to users in real time. The proposed solution uses a custom aeration method and an array of sensors to create a soft real time system. Growth of larvae is monitored using thermal imaging and classical computer vision techniques. Experimental testing reveals that our automated approach produces BSF larvae on par with manual techniques.
A Portable Agricultural Robot for Continuous Apparent Soil ElectricalConductivity Measurements to Improve Irrigation Practices
Jul 20, 2021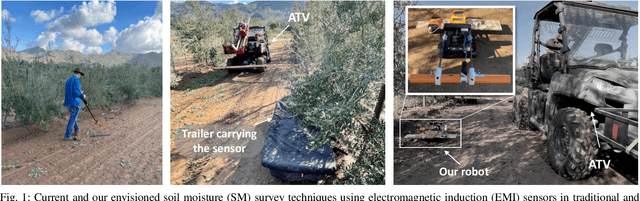

Near-ground sensing data, such as geospatial measurements of soil apparent electrical conductivity (ECa), are used in precision agriculture to improve farming practices and increase crop yield. Near-ground sensors provide valuable information, yet, the process of collecting, assessing, and interpreting measurements requires significant human labor. Automating parts of this process via the use of mobile robots can help decrease labor burden, and increase the accuracy and frequency of data collections, and overall increase the adoption and use of ECa measurement technology. This paper introduces a roboticized means to autonomously perform geospatial ECa measurements and map soil moisture content in micro-irrigated orchard systems. We retrofit a small wheeled mobile robot with a small electromagnetic induction sensor by studying and taking into consideration the effect of the robot body to the sensor's readings, and develop a software stack to enable autonomous logging of geo-referenced measurements. The proposed roboticized ECa measurement method is evaluated by mapping a 50m x 30m field against the baseline of human-conducted measurements obtained by walking the sensor in the same field and following the same path. Experimental testing reveals that our approach yields roboticized measurements comparable to human-conducted ones, despite the robot's small form factor.