 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-the-Go Tree Detection and Geometric Traits Estimation with Ground Mobile Robots in Fruit Tree Groves
Apr 03, 2024



By-tree information gathering is an essential task in precision agriculture achieved by ground mobile sensors, but it can be time- and labor-intensive. In this paper we present an algorithmic framework to perform real-time and on-the-go detection of trees and key geometric characteristics (namely, width and height) with wheeled mobile robots in the field. Our method is based on the fusion of 2D domain-specific data (normalized difference vegetation index [NDVI] acquired via a red-green-near-infrared [RGN] camera) and 3D LiDAR point clouds, via a customized tree landmark association and parameter estimation algorithm. The proposed system features a multi-modal and entropy-based landmark correspondences approach, integrated into an underlying Kalman filter system to recognize the surrounding trees and jointly estimate their spatial and vegetation-based characteristics. Realistic simulated tests are used to evaluate our proposed algorithm's behavior in a variety of settings. Physical experiments in agricultural fields help validate our method's efficacy in acquiring accurate by-tree information on-the-go and in real-time by employing only onboard computational and sensing resources.
Can SAM recognize crops? Quantifying the zero-shot performance of a semantic segmentation foundation model on generating crop-type maps using satellite imagery for precision agriculture
Dec 04, 2023Climate change is increasingly disrupting worldwide agriculture, making global food production less reliable. To tackle the growing challenges in feeding the planet, cutting-edge management strategies, such as precision agriculture, empower farmers and decision-makers with rich and actionable information to increase the efficiency and sustainability of their farming practices. Crop-type maps are key information for decision-support tools but are challenging and costly to generate. We investigate the capabilities of Meta AI's Segment Anything Model (SAM) for crop-map prediction task, acknowledging its recent successes at zero-shot image segmentation. However, SAM being limited to up-to 3 channel inputs and its zero-shot usage being class-agnostic in nature pose unique challenges in using it directly for crop-type mapping. We propose using clustering consensus metrics to assess SAM's zero-shot performance in segmenting satellite imagery and producing crop-type maps. Although direct crop-type mapping is challenging using SAM in zero-shot setting, experiments reveal SAM's potential for swiftly and accurately outlining fields in satellite images, serving as a foundation for subsequent crop classification. This paper attempts to highlight a use-case of state-of-the-art image segmentation models like SAM for crop-type mapping and related specific needs of the agriculture industry, offering a potential avenue for automatic, efficient, and cost-effective data products for precision agriculture practices.
Robot-assisted Soil Apparent Electrical Conductivity Measurements in Orchards
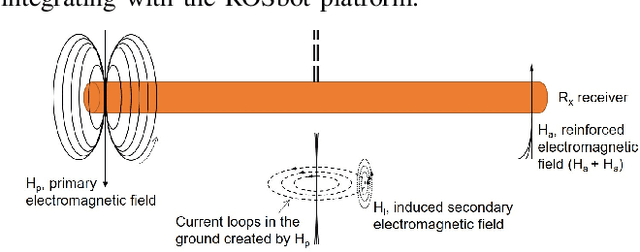
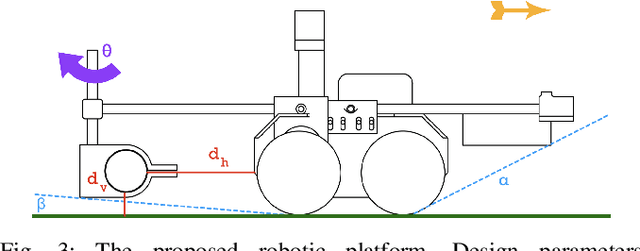
Sep 10, 2023Soil apparent electrical conductivity (ECa) is a vital metric in Precision Agriculture and Smart Farming, as it is used for optimal water content management, geological mapping, and yield prediction. Several existing methods seeking to estimate soil electrical conductivity are available, including physical soil sampling, ground sensor installation and monitoring, and the use of sensors that can obtain proximal ECa estimates. However, such methods can be either very laborious and/or too costly for practical use over larger field canopies. Robot-assisted ECa measurements, in contrast, may offer a scalable and cost-effective solution. In this work, we present one such solution that involves a ground mobile robot equipped with a customized and adjustable platform to hold an Electromagnetic Induction (EMI) sensor to perform semi-autonomous and on-demand ECa measurements under various field conditions. The platform is designed to be easily re-configurable in terms of sensor placement; results from testing for traversability and robot-to-sensor interference across multiple case studies help establish appropriate tradeoffs for sensor placement. Further, a developed simulation software package enables rapid and accessible estimation of terrain traversability in relation to desired EMI sensor placement. Extensive experimental evaluation across different fields demonstrates that the obtained robot-assisted ECa measurements are of high linearity compared with the ground truth (data collected manually by a handheld EMI sensor) by scoring more than $90\%$ in Pearson correlation coefficient in both plot measurements and estimated ECa maps generated by kriging interpolation. The proposed robotic solution supports autonomous behavior development in the field since it utilizes the ROS navigation stack along with the RTK GNSS positioning data and features various ranging sensors.
A Portable Agricultural Robot for Continuous Apparent Soil ElectricalConductivity Measurements to Improve Irrigation Practices
Jul 20, 2021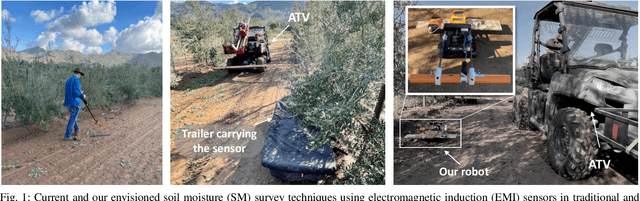

Near-ground sensing data, such as geospatial measurements of soil apparent electrical conductivity (ECa), are used in precision agriculture to improve farming practices and increase crop yield. Near-ground sensors provide valuable information, yet, the process of collecting, assessing, and interpreting measurements requires significant human labor. Automating parts of this process via the use of mobile robots can help decrease labor burden, and increase the accuracy and frequency of data collections, and overall increase the adoption and use of ECa measurement technology. This paper introduces a roboticized means to autonomously perform geospatial ECa measurements and map soil moisture content in micro-irrigated orchard systems. We retrofit a small wheeled mobile robot with a small electromagnetic induction sensor by studying and taking into consideration the effect of the robot body to the sensor's readings, and develop a software stack to enable autonomous logging of geo-referenced measurements. The proposed roboticized ECa measurement method is evaluated by mapping a 50m x 30m field against the baseline of human-conducted measurements obtained by walking the sensor in the same field and following the same path. Experimental testing reveals that our approach yields roboticized measurements comparable to human-conducted ones, despite the robot's small form factor.