 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Search-based Collision-inclusive Motion Planning and Control for Impact-resilient Mobile Robots
Paper and Code
Oct 05, 2022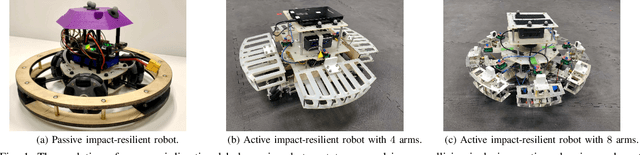
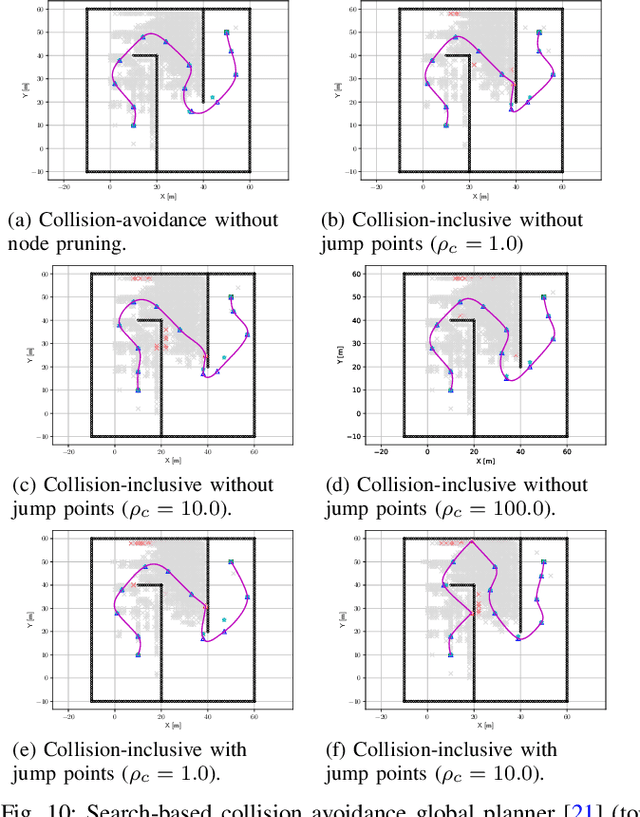
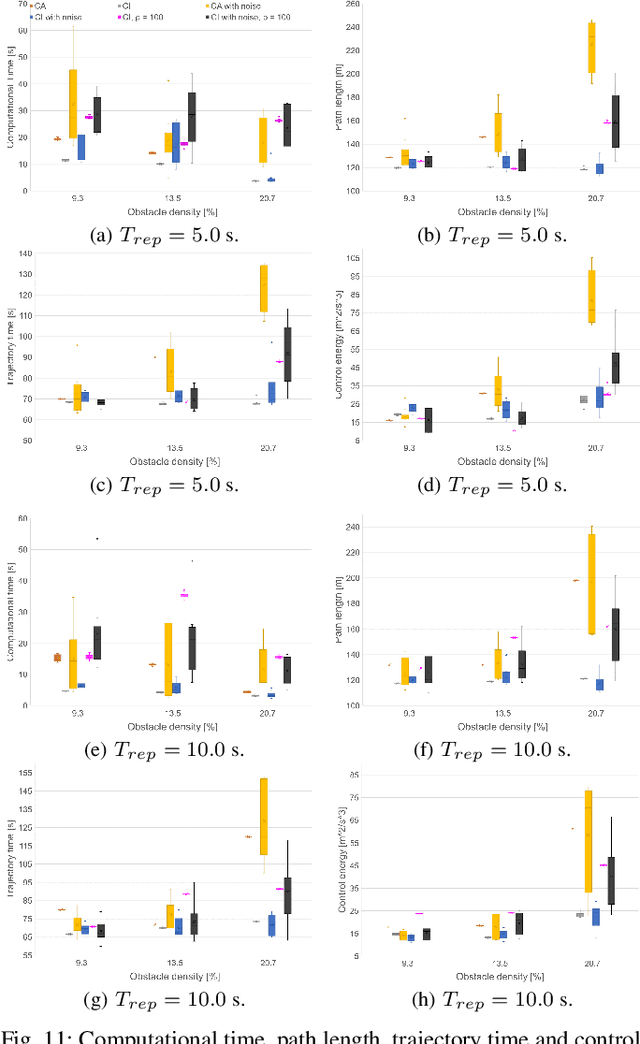
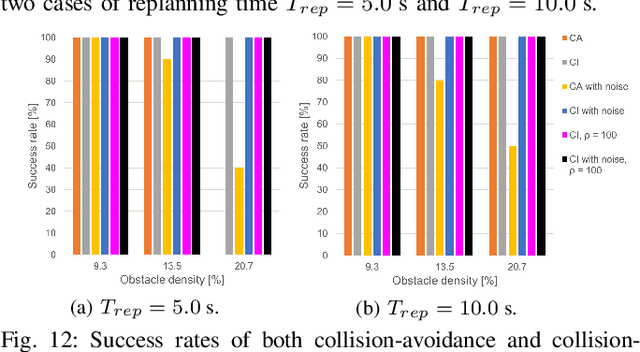
This paper focuses on the emerging paradigm shift of collision-inclusive motion planning and control for impact-resilient mobile robots, and develops a unified hierarchical framework for navigation in unknown and partially-observable cluttered spaces. At the lower-level, we develop a deformation recovery control and trajectory replanning strategy that handles collisions that may occur at run-time, locally. The low-level system actively detects collisions (via embedded Hall effect sensors on a mobile robot built in-house), enables the robot to recover from them, and locally adjusts the post-impact trajectory. Then, at the higher-level, we propose a search-based planning algorithm to determine how to best utilize potential collisions to improve certain metrics, such as control energy and computational time. Our method builds upon A* with jump points. We generate a novel heuristic function, and a collision checking and adjustment technique, thus making the A* algorithm converge faster to reach the goal by exploiting and utilizing possible collisions. The overall hierarchical framework generated by combining the global A* algorithm and the local deformation recovery and replanning strategy, as well as individual components of this framework, are tested extensively both in simulation and experimentally. An ablation study draws links to related state-of-the-art search-based collision-avoidance planners (for the overall framework), as well as search-based collision-avoidance and sampling-based collision-inclusive global planners (for the higher level). Results demonstrate our method's efficacy for collision-inclusive motion planning and control in unknown environments with isolated obstacles for a class of impact-resilient robots operating in 2D.