 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-aware Integrated Task and Motion Planning for Versatile Snake Robots under Localization Failures
Feb 27, 2025



Snake robots enable mobility through extreme terrains and confined environments in terrestrial and space applications. However, robust perception and localization for snake robots remain an open challenge due to the proximity of the sensor payload to the ground coupled with a limited field of view. To address this issue, we propose Blind-motion with Intermittently Scheduled Scans (BLISS) which combines proprioception-only mobility with intermittent scans to be resilient against both localization failures and collision risks. BLISS is formulated as an integrated Task and Motion Planning (TAMP) problem that leads to a Chance-Constrained Hybrid Partially Observable Markov Decision Process (CC-HPOMDP), known to be computationally intractable due to the curse of history. Our novelty lies in reformulating CC-HPOMDP as a tractable, convex Mixed Integer Linear Program. This allows us to solve BLISS-TAMP significantly faster and jointly derive optimal task-motion plans. Simulations and hardware experiments on the EELS snake robot show our method achieves over an order of magnitude computational improvement compared to state-of-the-art POMDP planners and $>$ 50\% better navigation time optimality versus classical two-stage planners.
Autonomous Off-road Navigation over Extreme Terrains with Perceptually-challenging Conditions
Jan 26, 2021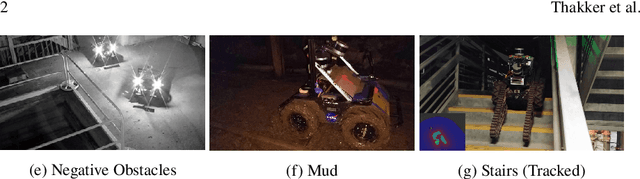
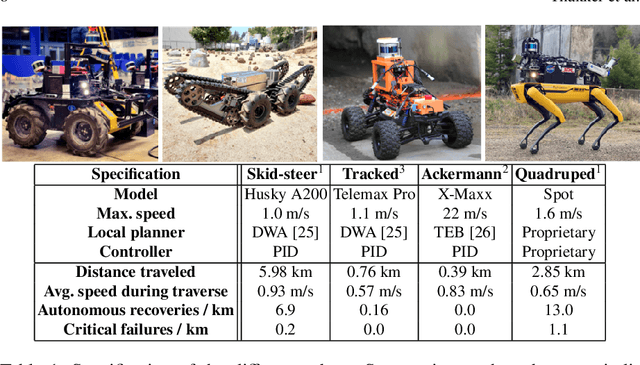
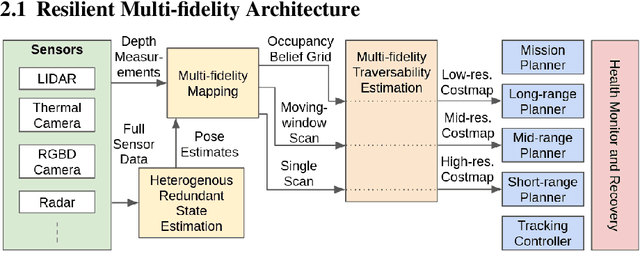
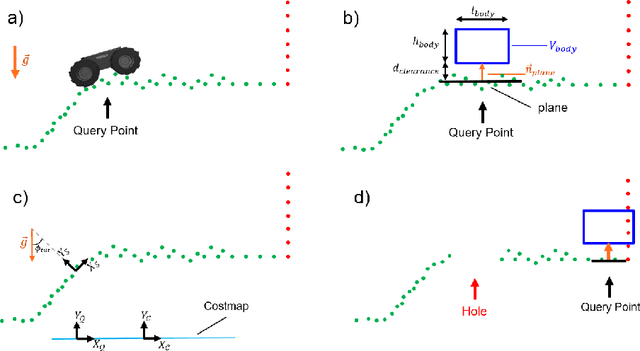
We propose a framework for resilient autonomous navigation in perceptually challenging unknown environments with mobility-stressing elements such as uneven surfaces with rocks and boulders, steep slopes, negative obstacles like cliffs and holes, and narrow passages. Environments are GPS-denied and perceptually-degraded with variable lighting from dark to lit and obscurants (dust, fog, smoke). Lack of prior maps and degraded communication eliminates the possibility of prior or off-board computation or operator intervention. This necessitates real-time on-board computation using noisy sensor data. To address these challenges, we propose a resilient architecture that exploits redundancy and heterogeneity in sensing modalities. Further resilience is achieved by triggering recovery behaviors upon failure. We propose a fast settling algorithm to generate robust multi-fidelity traversability estimates in real-time. The proposed approach was deployed on multiple physical systems including skid-steer and tracked robots, a high-speed RC car and legged robots, as a part of Team CoSTAR's effort to the DARPA Subterranean Challenge, where the team won 2nd and 1st place in the Tunnel and Urban Circuits, respectively.