 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMid-Air Helicopter Delivery at Mars Using a Jetpack
Mar 07, 2022
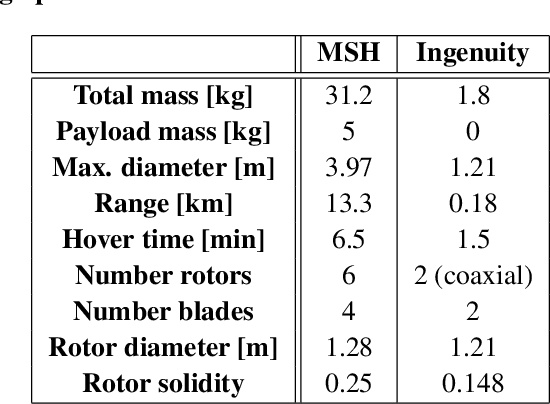
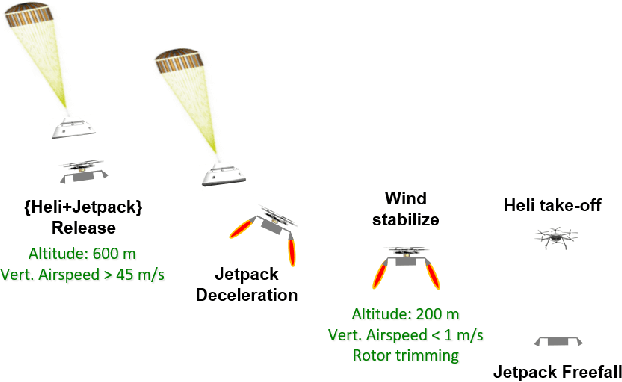
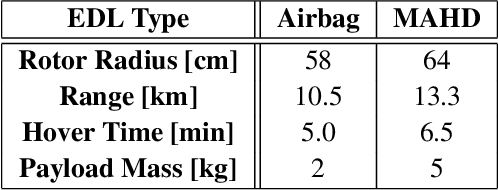
Mid-Air Helicopter Delivery (MAHD) is a new Entry, Descent and Landing (EDL) architecture to enable in situ mobility for Mars science at lower cost than previous missions. It uses a jetpack to slow down a Mars Science Helicopter (MSH) after separation from the backshell, and reach aerodynamic conditions suitable for helicopter take-off in mid air. For given aeroshell dimensions, only MAHD's lander-free approach leaves enough room in the aeroshell to accommodate the largest rotor option for MSH. This drastically improves flight performance, notably allowing +150\% increased science payload mass. Compared to heritage EDL approaches, the simpler MAHD architecture is also likely to reduce cost, and enables access to more hazardous and higher-elevation terrains on Mars. This paper introduces a design for the MAHD system architecture and operations. We present a mechanical configuration that fits both MSH and the jetpack within the 2.65-m Mars heritage aeroshell, and a jetpack control architecture which fully leverages the available helicopter avionics. We discuss preliminary numerical models of the flow dynamics resulting from the interaction between the jets, the rotors and the side winds. We define a force-torque sensing architecture capable of handling the wind and trimming the rotors to prepare for safe take-off. Finally, we analyze the dynamic environment and closed-loop control simulation results to demonstrate the preliminary feasibility of MAHD.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021
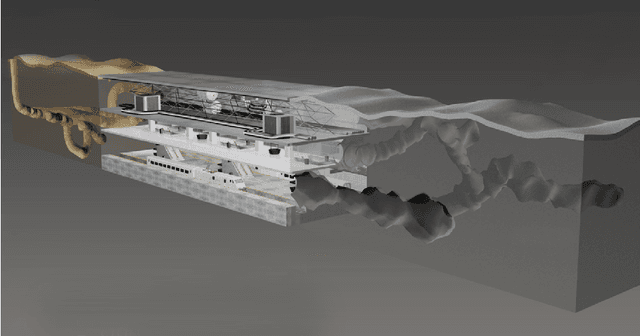
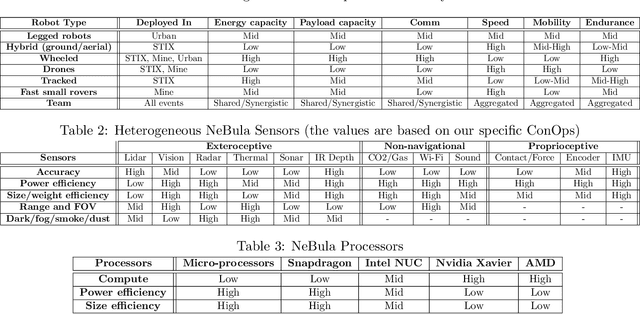
This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
Autonomous Off-road Navigation over Extreme Terrains with Perceptually-challenging Conditions
Jan 26, 2021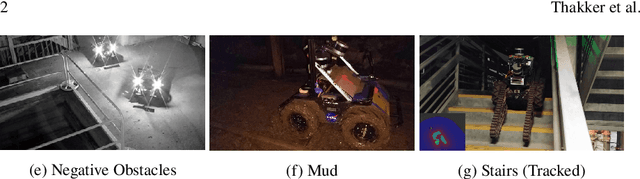
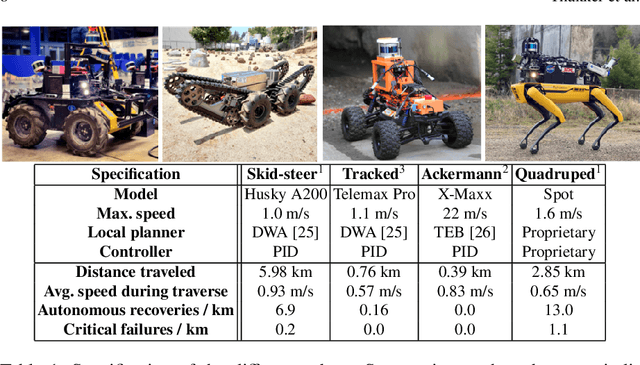
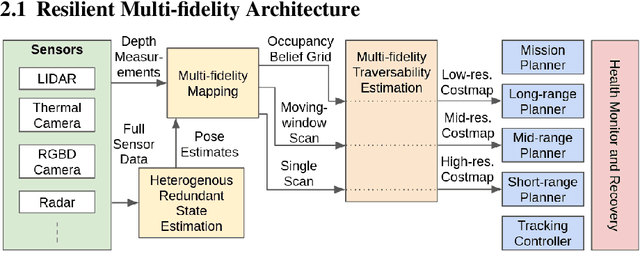
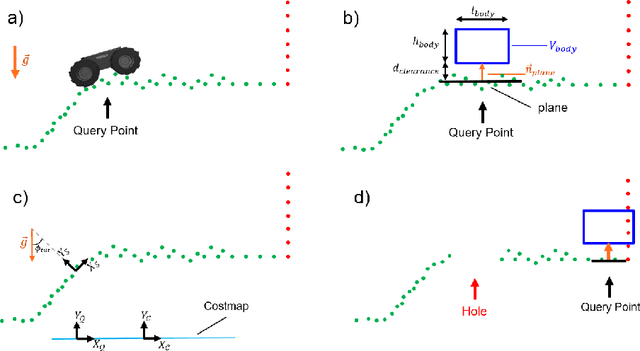
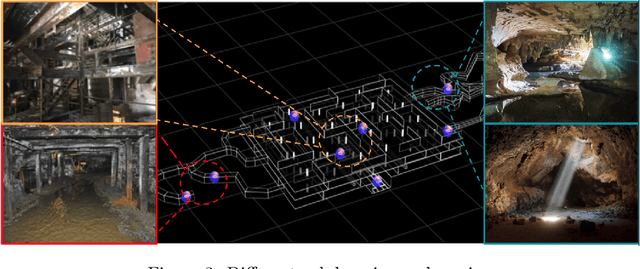
We propose a framework for resilient autonomous navigation in perceptually challenging unknown environments with mobility-stressing elements such as uneven surfaces with rocks and boulders, steep slopes, negative obstacles like cliffs and holes, and narrow passages. Environments are GPS-denied and perceptually-degraded with variable lighting from dark to lit and obscurants (dust, fog, smoke). Lack of prior maps and degraded communication eliminates the possibility of prior or off-board computation or operator intervention. This necessitates real-time on-board computation using noisy sensor data. To address these challenges, we propose a resilient architecture that exploits redundancy and heterogeneity in sensing modalities. Further resilience is achieved by triggering recovery behaviors upon failure. We propose a fast settling algorithm to generate robust multi-fidelity traversability estimates in real-time. The proposed approach was deployed on multiple physical systems including skid-steer and tracked robots, a high-speed RC car and legged robots, as a part of Team CoSTAR's effort to the DARPA Subterranean Challenge, where the team won 2nd and 1st place in the Tunnel and Urban Circuits, respectively.
Machine Learning Based Path Planning for Improved Rover Navigation (Pre-Print Version)
Nov 11, 2020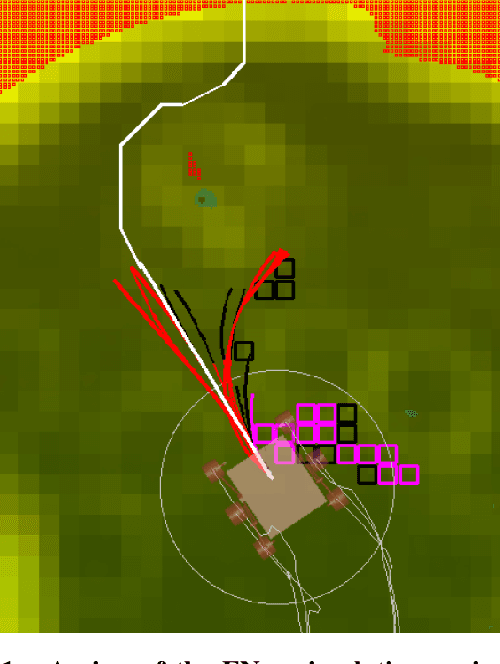
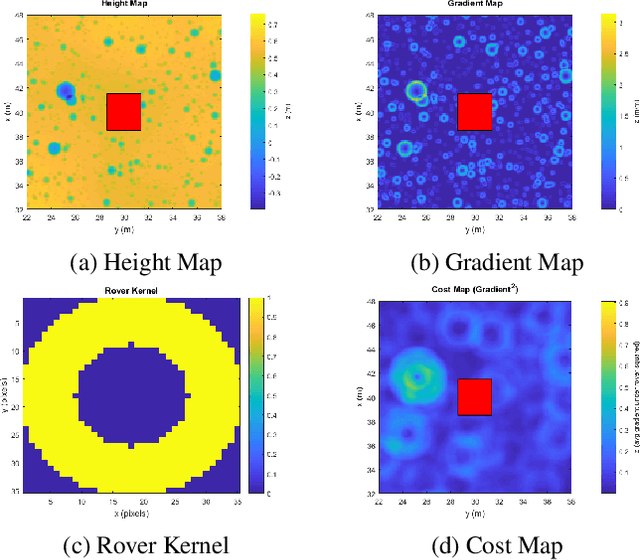
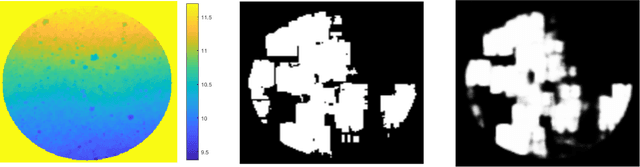
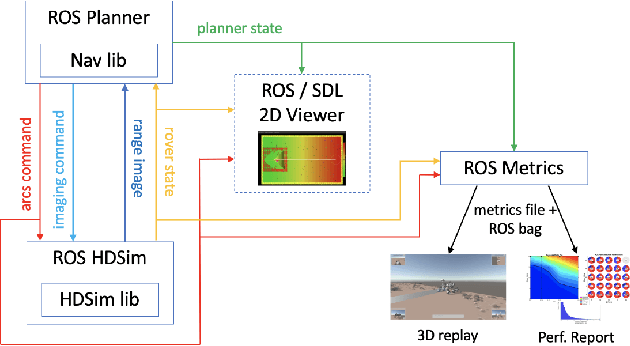
Enhanced AutoNav (ENav), the baseline surface navigation software for NASA's Perseverance rover, sorts a list of candidate paths for the rover to traverse, then uses the Approximate Clearance Evaluation (ACE) algorithm to evaluate whether the most highly ranked paths are safe. ACE is crucial for maintaining the safety of the rover, but is computationally expensive. If the most promising candidates in the list of paths are all found to be infeasible, ENav must continue to search the list and run time-consuming ACE evaluations until a feasible path is found. In this paper, we present two heuristics that, given a terrain heightmap around the rover, produce cost estimates that more effectively rank the candidate paths before ACE evaluation. The first heuristic uses Sobel operators and convolution to incorporate the cost of traversing high-gradient terrain. The second heuristic uses a machine learning (ML) model to predict areas that will be deemed untraversable by ACE. We used physics simulations to collect training data for the ML model and to run Monte Carlo trials to quantify navigation performance across a variety of terrains with various slopes and rock distributions. Compared to ENav's baseline performance, integrating the heuristics can lead to a significant reduction in ACE evaluations and average computation time per planning cycle, increase path efficiency, and maintain or improve the rate of successful traverses. This strategy of targeting specific bottlenecks with ML while maintaining the original ACE safety checks provides an example of how ML can be infused into planetary science missions and other safety-critical software.
Fast Approximate Clearance Evaluation for Kinematically Constrained Articulated Suspension Systems
Jul 31, 2018

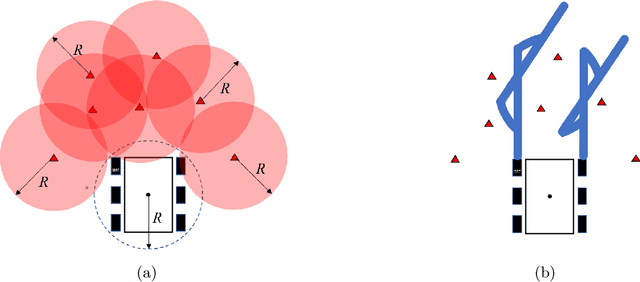
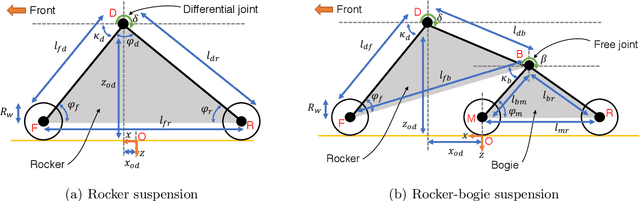
In this paper, we present a light-weight collision detection algorithm for motion planning of planetary rovers with articulated suspension systems. Extraterrestrial path planning is challenging due to the combination of terrain roughness and severe limitation in computational resources. Path planning on cluttered and/or uneven terrains requires repeated collision detection on all the candidate paths at a small interval. Solving the exact collision detection problem for articulated suspension systems requires simulating the vehicle settling on the terrain, which involves an inverse-kinematics problem with iterative nonlinear optimization under geometric constraints. However, such expensive computation is intractable for slow spacecraft computers, such as the RAD750 that is used by the Curiosity Mars rover and upcoming Mars 2020 rover. We propose the Approximate Clearance Evaluation (ACE) algorithm, which obtains conservative bounds on vehicle clearance, attitude, and suspension angles without iterative computation. It obtains those bounds by estimating the lowest and highest heights that each wheel may reach given the underlying terrain, and calculating the worst-case vehicle configuration associated with those extreme wheel heights. The bounds are guaranteed to be conservative, hence ensuring vehicle safety during autonomous navigation. ACE is planned to be used as part of the new onboard path planner of the Mars 2020 rover. This paper describes the algorithm in detail and validates our claim of conservatism and fast computation through experiments.