 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
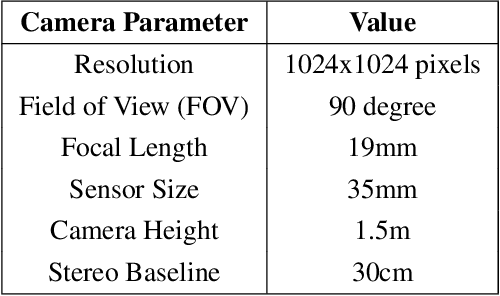
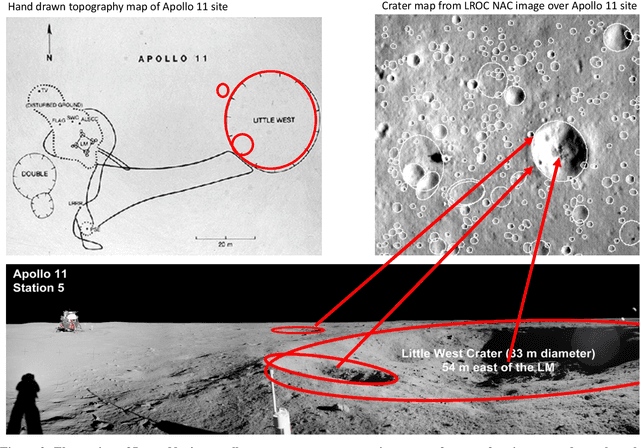
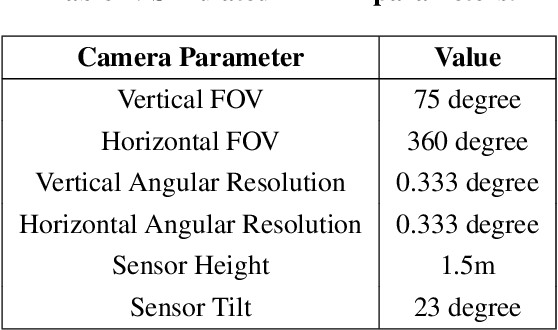
Add to EdgeShadowNav: Crater-Based Localization for Nighttime and Permanently Shadowed Region Lunar Navigation
Jan 11, 2023



There has been an increase in interest in missions that drive significantly longer distances per day than what has currently been performed. Further, some of these proposed missions require autonomous driving and absolute localization in darkness. For example, the Endurance A mission proposes to drive 1200km of its total traverse at night. The lack of natural light available during such missions limits what can be used as visual landmarks and the range at which landmarks can be observed. In order for planetary rovers to traverse long ranges, onboard absolute localization is critical to the ability of the rover to maintain its planned trajectory and avoid known hazardous regions. Currently, to accomplish absolute localization, a ground in the loop (GITL) operation is performed wherein a human operator matches local maps or images from onboard with orbital images and maps. This GITL operation limits the distance that can be driven in a day to a few hundred meters, which is the distance that the rover can maintain acceptable localization error via relative methods. Previous work has shown that using craters as landmarks is a promising approach for performing absolute localization on the moon during the day. In this work we present a method of absolute localization that utilizes craters as landmarks and matches detected crater edges on the surface with known craters in orbital maps. We focus on a localization method based on a perception system which has an external illuminator and a stereo camera. We evaluate (1) both monocular and stereo based surface crater edge detection techniques, (2) methods of scoring the crater edge matches for optimal localization, and (3) localization performance on simulated Lunar surface imagery at night. We demonstrate that this technique shows promise for maintaining absolute localization error of less than 10m required for most planetary rover missions.
LunarNav: Crater-based Localization for Long-range Autonomous Lunar Rover Navigation
Jan 03, 2023



The Artemis program requires robotic and crewed lunar rovers for resource prospecting and exploitation, construction and maintenance of facilities, and human exploration. These rovers must support navigation for 10s of kilometers (km) from base camps. A lunar science rover mission concept - Endurance-A, has been recommended by the new Decadal Survey as the highest priority medium-class mission of the Lunar Discovery and Exploration Program, and would be required to traverse approximately 2000 km in the South Pole-Aitkin (SPA) Basin, with individual drives of several kilometers between stops for downlink. These rover mission scenarios require functionality that provides onboard, autonomous, global position knowledge ( aka absolute localization). However, planetary rovers have no onboard global localization capability to date; they have only used relative localization, by integrating combinations of wheel odometry, visual odometry, and inertial measurements during each drive to track position relative to the start of each drive. In this work, we summarize recent developments from the LunarNav project, where we have developed algorithms and software to enable lunar rovers to estimate their global position and heading on the Moon with a goal performance of position error less than 5 meters (m) and heading error less than 3-degree, 3-sigma, in sunlit areas. This will be achieved autonomously onboard by detecting craters in the vicinity of the rover and matching them to a database of known craters mapped from orbit. The overall technical framework consists of three main elements: 1) crater detection, 2) crater matching, and 3) state estimation. In previous work, we developed crater detection algorithms for three different sensing modalities. Our results suggest that rover localization with an error less than 5 m is highly probable during daytime operations.
Lunar Rover Localization Using Craters as Landmarks
Mar 18, 2022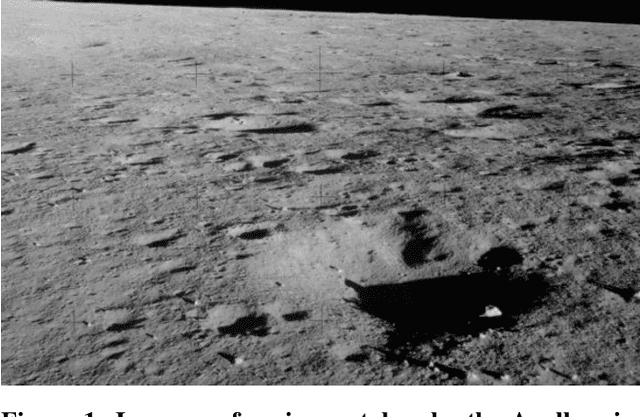
Onboard localization capabilities for planetary rovers to date have used relative navigation, by integrating combinations of wheel odometry, visual odometry, and inertial measurements during each drive to track position relative to the start of each drive. At the end of each drive, a ground-in-the-loop (GITL) interaction is used to get a position update from human operators in a more global reference frame, by matching images or local maps from onboard the rover to orbital reconnaissance images or maps of a large region around the rover's current position. Autonomous rover drives are limited in distance so that accumulated relative navigation error does not risk the possibility of the rover driving into hazards known from orbital images. However, several rover mission concepts have recently been studied that require much longer drives between GITL cycles, particularly for the Moon. These concepts require greater autonomy to minimize GITL cycles to enable such large range; onboard global localization is a key element of such autonomy. Multiple techniques have been studied in the past for onboard rover global localization, but a satisfactory solution has not yet emerged. For the Moon, the ubiquitous craters offer a new possibility, which involves mapping craters from orbit, then recognizing crater landmarks with cameras and-or a lidar onboard the rover. This approach is applicable everywhere on the Moon, does not require high resolution stereo imaging from orbit as some other approaches do, and has potential to enable position knowledge with order of 5 to 10 m accuracy at all times. This paper describes our technical approach to crater-based lunar rover localization and presents initial results on crater detection using 3D point cloud data from onboard lidar or stereo cameras, as well as using shading cues in monocular onboard imagery.
MLNav: Learning to Safely Navigate on Martian Terrains
Mar 09, 2022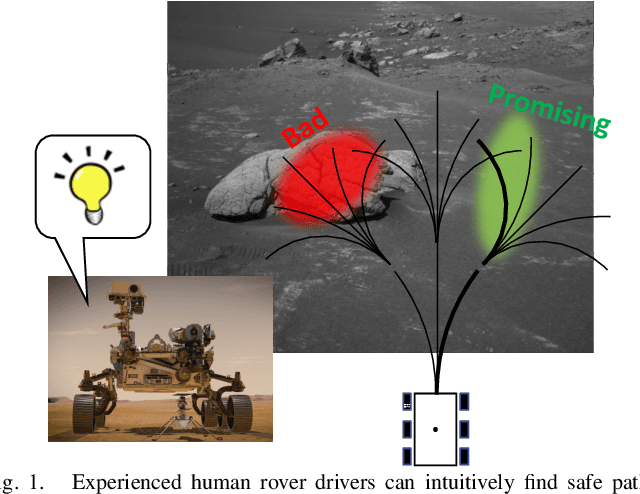
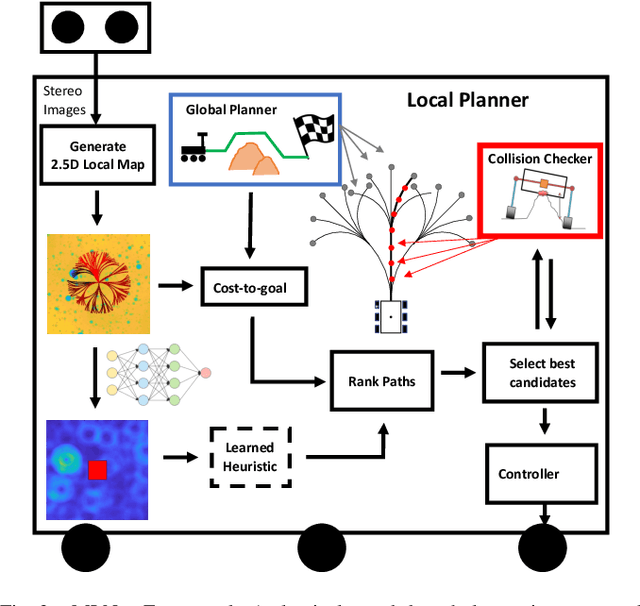
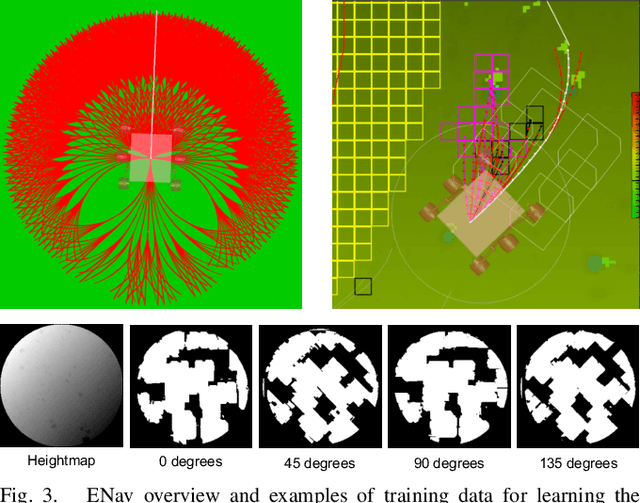
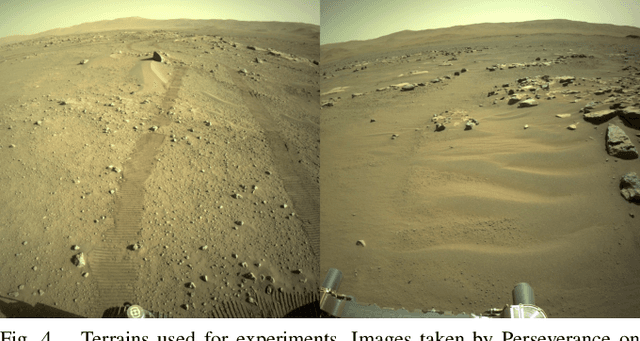
We present MLNav, a learning-enhanced path planning framework for safety-critical and resource-limited systems operating in complex environments, such as rovers navigating on Mars. MLNav makes judicious use of machine learning to enhance the efficiency of path planning while fully respecting safety constraints. In particular, the dominant computational cost in such safety-critical settings is running a model-based safety checker on the proposed paths. Our learned search heuristic can simultaneously predict the feasibility for all path options in a single run, and the model-based safety checker is only invoked on the top-scoring paths. We validate in high-fidelity simulations using both real Martian terrain data collected by the Perseverance rover, as well as a suite of challenging synthetic terrains. Our experiments show that: (i) compared to the baseline ENav path planner on board the Perserverance rover, MLNav can provide a significant improvement in multiple key metrics, such as a 10x reduction in collision checks when navigating real Martian terrains, despite being trained with synthetic terrains; and (ii) MLNav can successfully navigate highly challenging terrains where the baseline ENav fails to find a feasible path before timing out.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021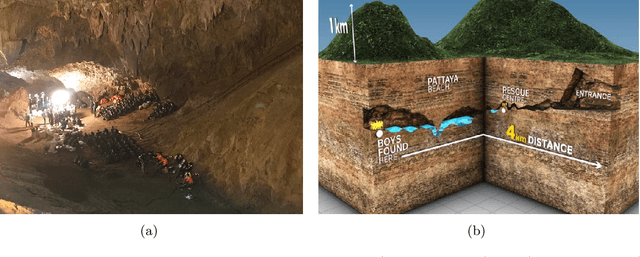
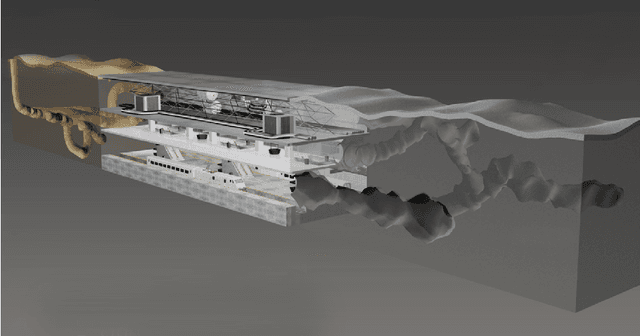
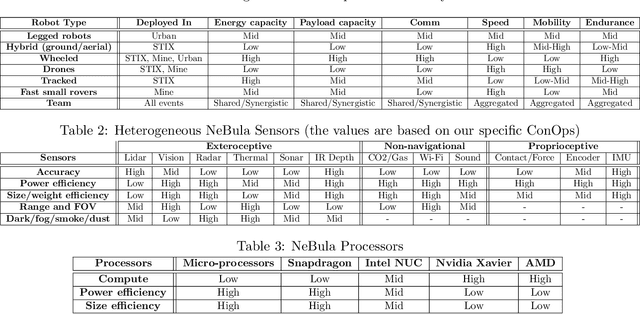
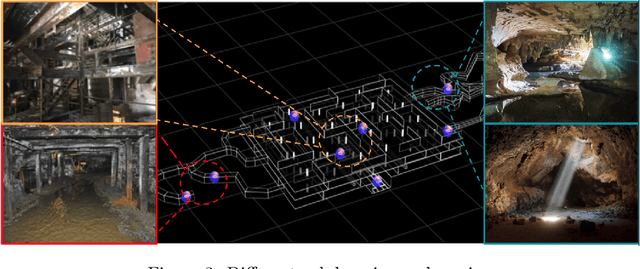
This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
Machine Vision based Sample-Tube Localization for Mars Sample Return
Mar 17, 2021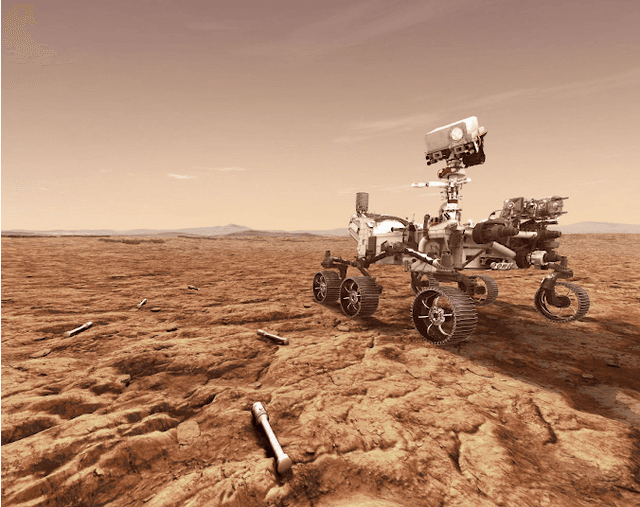

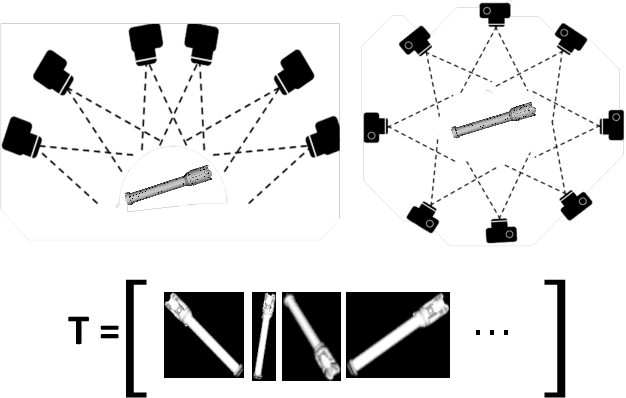
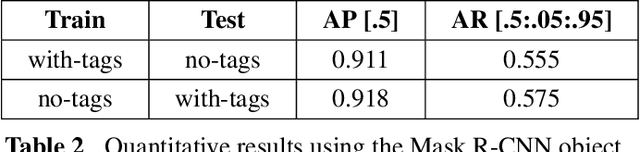
A potential Mars Sample Return (MSR) architecture is being jointly studied by NASA and ESA. As currently envisioned, the MSR campaign consists of a series of 3 missions: sample cache, fetch and return to Earth. In this paper, we focus on the fetch part of the MSR, and more specifically the problem of autonomously detecting and localizing sample tubes deposited on the Martian surface. Towards this end, we study two machine-vision based approaches: First, a geometry-driven approach based on template matching that uses hard-coded filters and a 3D shape model of the tube; and second, a data-driven approach based on convolutional neural networks (CNNs) and learned features. Furthermore, we present a large benchmark dataset of sample-tube images, collected in representative outdoor environments and annotated with ground truth segmentation masks and locations. The dataset was acquired systematically across different terrain, illumination conditions and dust-coverage; and benchmarking was performed to study the feasibility of each approach, their relative strengths and weaknesses, and robustness in the presence of adverse environmental conditions.
Rover Relocalization for Mars Sample Return by Virtual Template Synthesis and Matching
Mar 05, 2021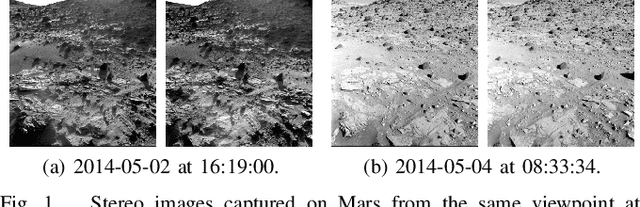
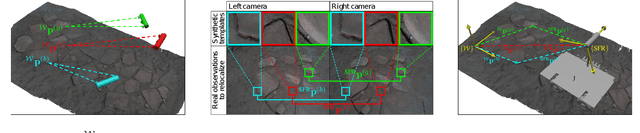
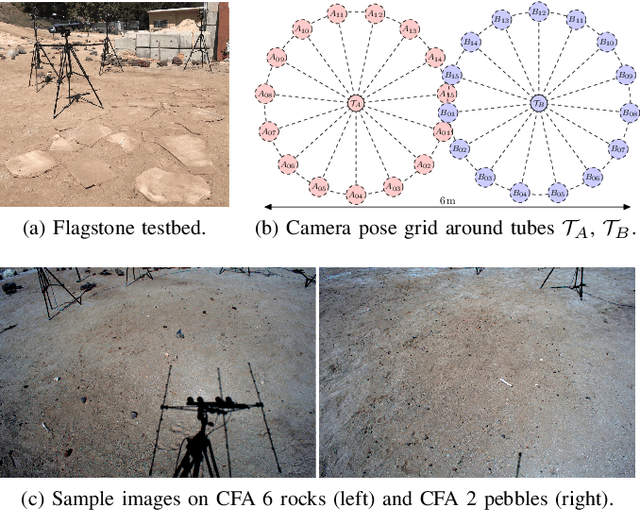
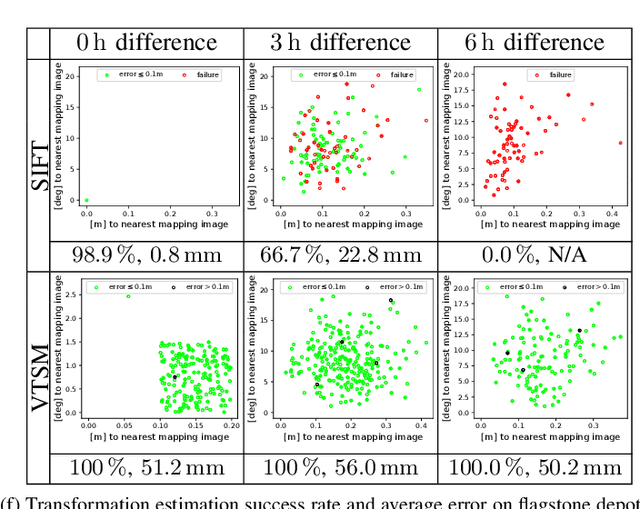
We consider the problem of rover relocalization in the context of the notional Mars Sample Return campaign. In this campaign, a rover (R1) needs to be capable of autonomously navigating and localizing itself within an area of approximately 50 x 50 m using reference images collected years earlier by another rover (R0). We propose a visual localizer that exhibits robustness to the relatively barren terrain that we expect to find in relevant areas, and to large lighting and viewpoint differences between R0 and R1. The localizer synthesizes partial renderings of a mesh built from reference R0 images and matches those to R1 images. We evaluate our method on a dataset totaling 2160 images covering the range of expected environmental conditions (terrain, lighting, approach angle). Experimental results show the effectiveness of our approach. This work informs the Mars Sample Return campaign on the choice of a site where Perseverance (R0) will place a set of sample tubes for future retrieval by another rover (R1).
Online Photometric Calibration of Automatic Gain Thermal Infrared Cameras
Jan 11, 2021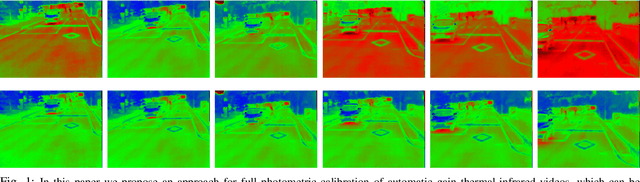
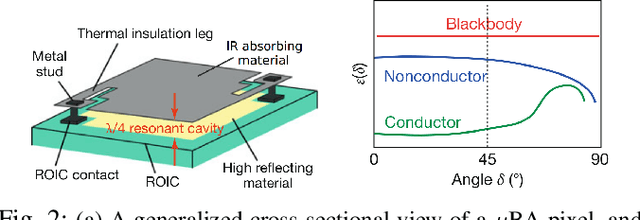
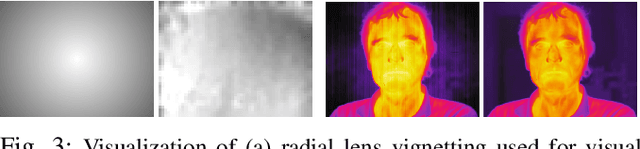
Thermal infrared cameras are increasingly being used in various applications such as robot vision, industrial inspection and medical imaging, thanks to their improved resolution and portability. However, the performance of traditional computer vision techniques developed for electro-optical imagery does not directly translate to the thermal domain due to two major reasons: these algorithms require photometric assumptions to hold, and methods for photometric calibration of RGB cameras cannot be applied to thermal-infrared cameras due to difference in data acquisition and sensor phenomenology. In this paper, we take a step in this direction, and introduce a novel algorithm for online photometric calibration of thermal-infrared cameras. Our proposed method does not require any specific driver/hardware support and hence can be applied to any commercial off-the-shelf thermal IR camera. We present this in the context of visual odometry and SLAM algorithms, and demonstrate the efficacy of our proposed system through extensive experiments for both standard benchmark datasets, and real-world field tests with a thermal-infrared camera in natural outdoor environments.
Machine Learning Based Path Planning for Improved Rover Navigation (Pre-Print Version)
Nov 11, 2020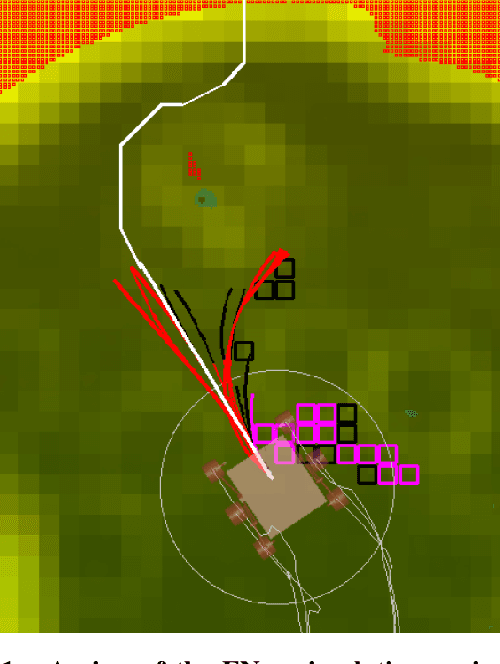
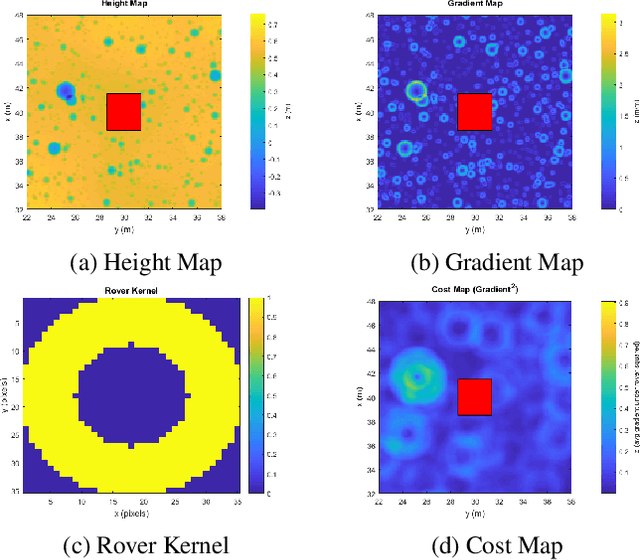
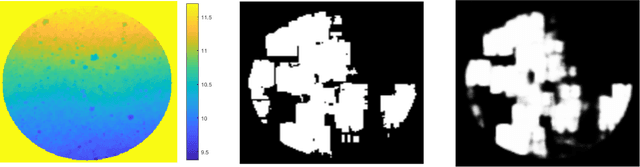
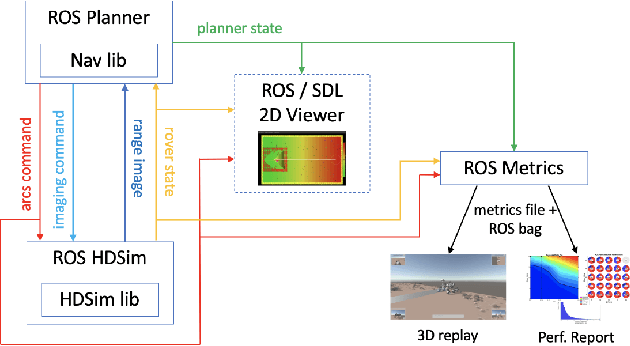
Enhanced AutoNav (ENav), the baseline surface navigation software for NASA's Perseverance rover, sorts a list of candidate paths for the rover to traverse, then uses the Approximate Clearance Evaluation (ACE) algorithm to evaluate whether the most highly ranked paths are safe. ACE is crucial for maintaining the safety of the rover, but is computationally expensive. If the most promising candidates in the list of paths are all found to be infeasible, ENav must continue to search the list and run time-consuming ACE evaluations until a feasible path is found. In this paper, we present two heuristics that, given a terrain heightmap around the rover, produce cost estimates that more effectively rank the candidate paths before ACE evaluation. The first heuristic uses Sobel operators and convolution to incorporate the cost of traversing high-gradient terrain. The second heuristic uses a machine learning (ML) model to predict areas that will be deemed untraversable by ACE. We used physics simulations to collect training data for the ML model and to run Monte Carlo trials to quantify navigation performance across a variety of terrains with various slopes and rock distributions. Compared to ENav's baseline performance, integrating the heuristics can lead to a significant reduction in ACE evaluations and average computation time per planning cycle, increase path efficiency, and maintain or improve the rate of successful traverses. This strategy of targeting specific bottlenecks with ML while maintaining the original ACE safety checks provides an example of how ML can be infused into planetary science missions and other safety-critical software.
Online Self-supervised Scene Segmentation for Micro Aerial Vehicles
Jun 13, 2018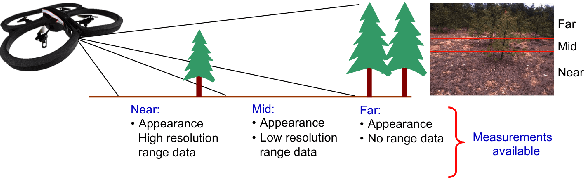
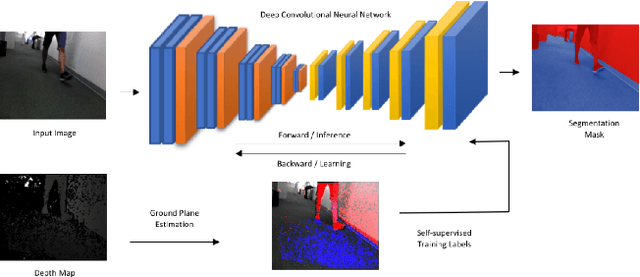
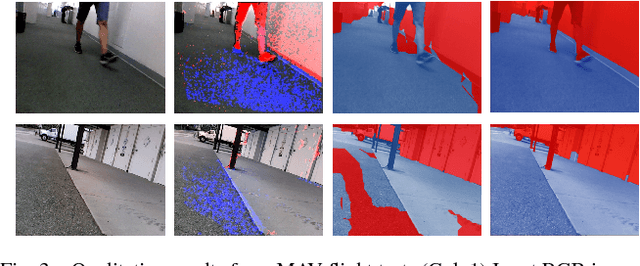
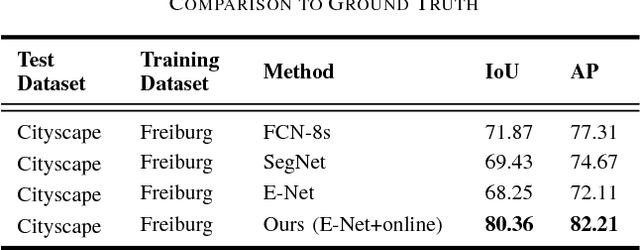
Recently, there have been numerous advances in the development of payload and power constrained lightweight Micro Aerial Vehicles (MAVs). As these robots aspire for high-speed autonomous flights in complex dynamic environments, robust scene understanding at long-range becomes critical. The problem is heavily characterized by either the limitations imposed by sensor capabilities for geometry-based methods, or the need for large-amounts of manually annotated training data required by data-driven methods. This motivates the need to build systems that have the capability to alleviate these problems by exploiting the complimentary strengths of both geometry and data-driven methods. In this paper, we take a step in this direction and propose a generic framework for adaptive scene segmentation using self-supervised online learning. We present this in the context of vision-based autonomous MAV flight, and demonstrate the efficacy of our proposed system through extensive experiments on benchmark datasets and real-world field tests.