 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOccupancy Detection Based on Electricity Consumption
Dec 13, 2023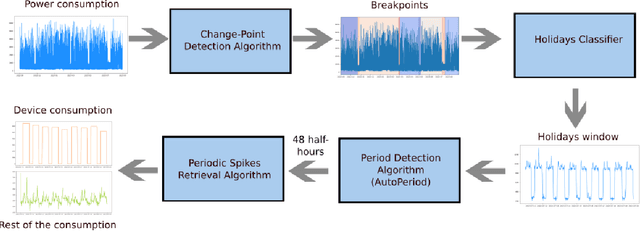
This article presents a new methodology for extracting intervals when a home is vacant from low-frequency electricity consumption data. The approach combines multiple algorithms, including change point detection, classification, period detection, and periodic spikes retrieval. It shows encouraging results on both simulated and real consumption curves. This approach offers practical insights for optimizing energy use and holds potential benefits for residential consumers and utility companies in terms of energy cost reduction and sustainability. Further research is needed to enhance its applicability in diverse settings and with larger datasets.
Domain Knowledge Aids in Signal Disaggregation; the Example of the Cumulative Water Heater
Mar 22, 2022



In this article we present an unsupervised low-frequency method aimed at detecting and disaggregating the power used by Cumulative Water Heaters (CWH) in residential homes. Our model circumvents the inherent difficulty of unsupervised signal disaggregation by using both the shape of a power spike and its time of occurrence to identify the contribution of CWH reliably. Indeed, many CHWs in France are configured to turn on automatically during off-peak hours only, and we are able to use this domain knowledge to aid peak identification despite the low sampling frequency. In order to test our model, we equipped a home with sensors to record the ground-truth consumption of a water heater. We then apply the model to a larger dataset of energy consumption of Hello Watt users consisting of one month of consumption data for 5k homes at 30-minute resolution. In this dataset we successfully identified CWHs in the majority of cases where consumers declared using them. The remaining part is likely due to possible misconfiguration of CWHs, since triggering them during off-peak hours requires specific wiring in the electrical panel of the house. Our model, despite its simplicity, offers promising applications: detection of mis-configured CWHs on off-peak contracts and slow performance degradation.
PBCS : Efficient Exploration and Exploitation Using a Synergy between Reinforcement Learning and Motion Planning
Apr 24, 2020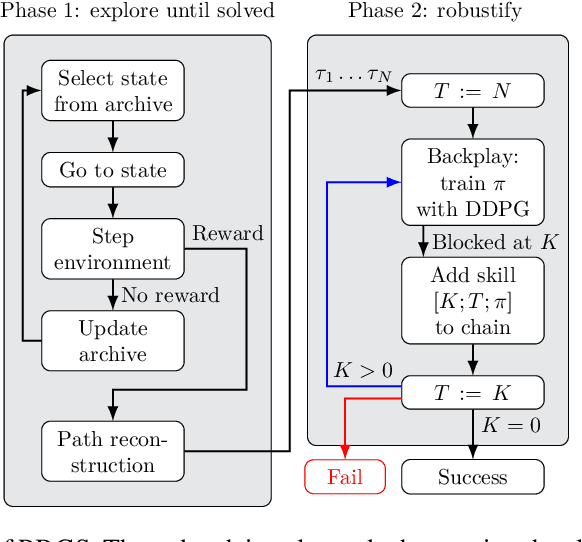
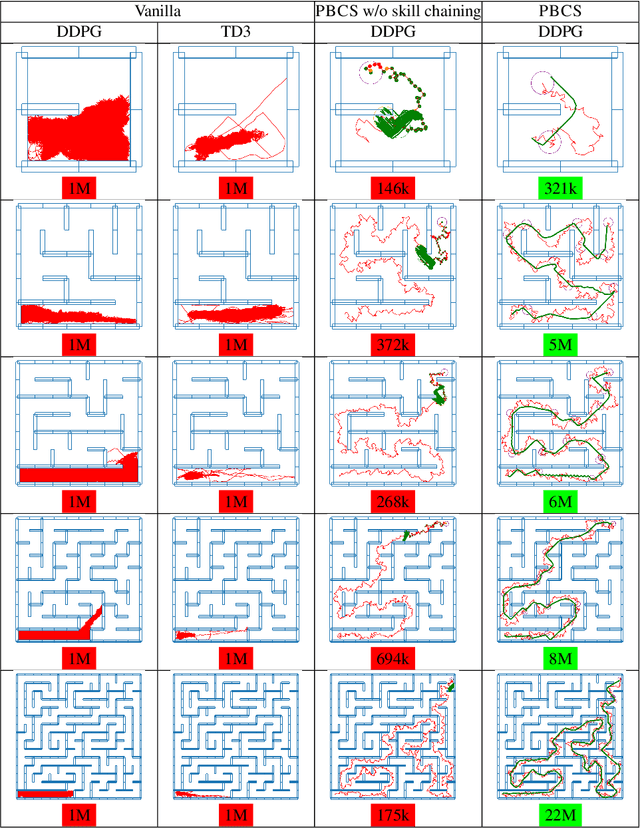
The exploration-exploitation trade-off is at the heart of reinforcement learning (RL). However, most continuous control benchmarks used in recent RL research only require local exploration. This led to the development of algorithms that have basic exploration capabilities, and behave poorly in benchmarks that require more versatile exploration. For instance, as demonstrated in our empirical study, state-of-the-art RL algorithms such as DDPG and TD3 are unable to steer a point mass in even small 2D mazes. In this paper, we propose a new algorithm called "Plan, Backplay, Chain Skills" (PBCS) that combines motion planning and reinforcement learning to solve hard exploration environments. In a first phase, a motion planning algorithm is used to find a single good trajectory, then an RL algorithm is trained using a curriculum derived from the trajectory, by combining a variant of the Backplay algorithm and skill chaining. We show that this method outperforms state-of-the-art RL algorithms in 2D maze environments of various sizes, and is able to improve on the trajectory obtained by the motion planning phase.
The problem with DDPG: understanding failures in deterministic environments with sparse rewards
Nov 26, 2019

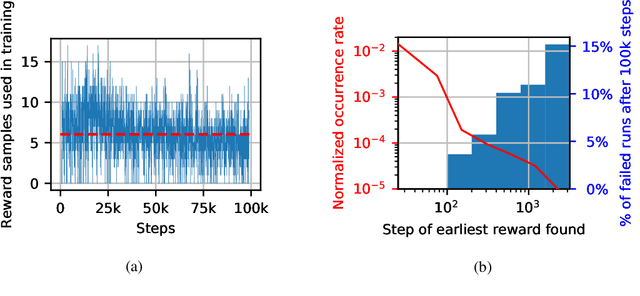

In environments with continuous state and action spaces, state-of-the-art actor-critic reinforcement learning algorithms can solve very complex problems, yet can also fail in environments that seem trivial, but the reason for such failures is still poorly understood. In this paper, we contribute a formal explanation of these failures in the particular case of sparse reward and deterministic environments. First, using a very elementary control problem, we illustrate that the learning process can get stuck into a fixed point corresponding to a poor solution. Then, generalizing from the studied example, we provide a detailed analysis of the underlying mechanisms which results in a new understanding of one of the convergence regimes of these algorithms. The resulting perspective casts a new light on already existing solutions to the issues we have highlighted, and suggests other potential approaches.
Fast Approximate Clearance Evaluation for Kinematically Constrained Articulated Suspension Systems
Jul 31, 2018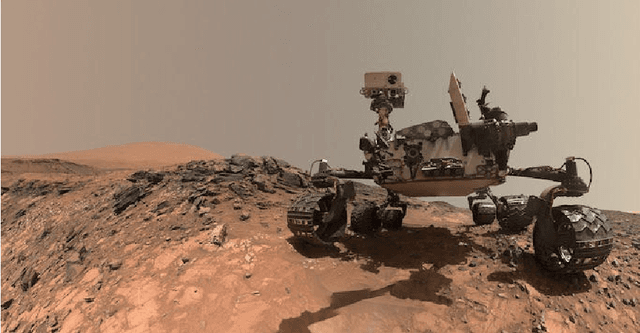

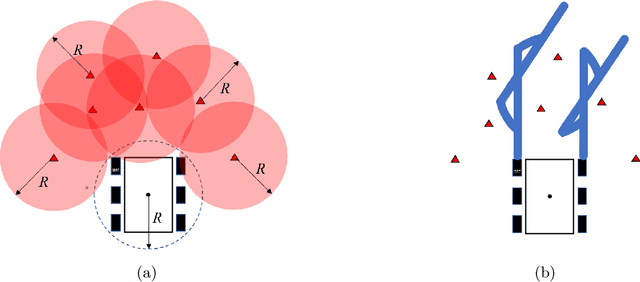
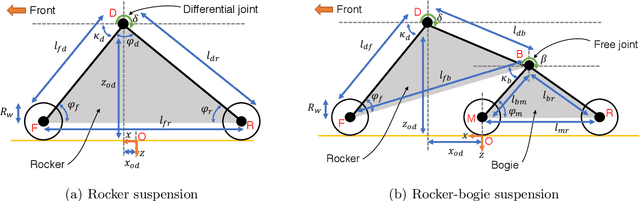
In this paper, we present a light-weight collision detection algorithm for motion planning of planetary rovers with articulated suspension systems. Extraterrestrial path planning is challenging due to the combination of terrain roughness and severe limitation in computational resources. Path planning on cluttered and/or uneven terrains requires repeated collision detection on all the candidate paths at a small interval. Solving the exact collision detection problem for articulated suspension systems requires simulating the vehicle settling on the terrain, which involves an inverse-kinematics problem with iterative nonlinear optimization under geometric constraints. However, such expensive computation is intractable for slow spacecraft computers, such as the RAD750 that is used by the Curiosity Mars rover and upcoming Mars 2020 rover. We propose the Approximate Clearance Evaluation (ACE) algorithm, which obtains conservative bounds on vehicle clearance, attitude, and suspension angles without iterative computation. It obtains those bounds by estimating the lowest and highest heights that each wheel may reach given the underlying terrain, and calculating the worst-case vehicle configuration associated with those extreme wheel heights. The bounds are guaranteed to be conservative, hence ensuring vehicle safety during autonomous navigation. ACE is planned to be used as part of the new onboard path planner of the Mars 2020 rover. This paper describes the algorithm in detail and validates our claim of conservatism and fast computation through experiments.