 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvanced BIT* (ABIT*): Sampling-Based Planning with Advanced Graph-Search Techniques
Paper and Code
Feb 16, 2020
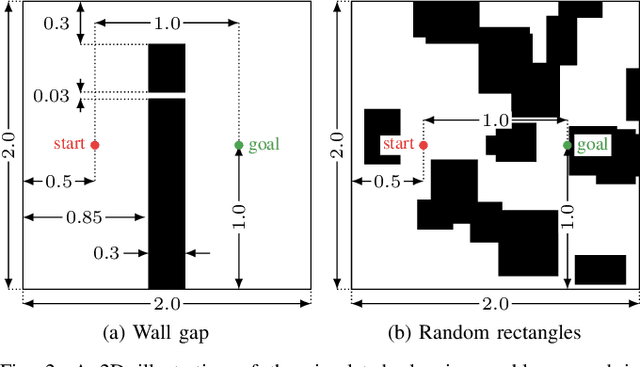
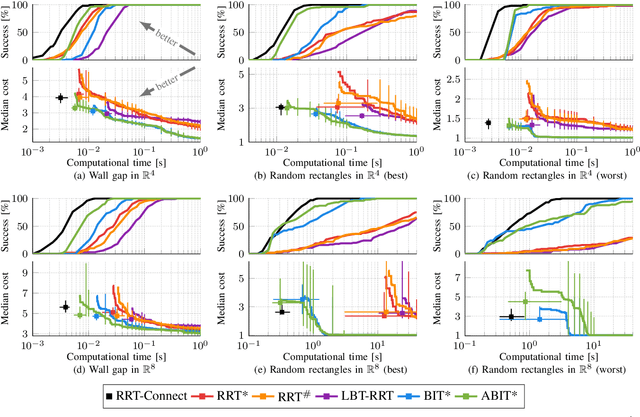
Path planning is an active area of research essential for many applications in robotics. Popular techniques include graph-based searches and sampling-based planners. These approaches are powerful but have limitations. This paper continues work to combine their strengths and mitigate their limitations using a unified planning paradigm. It does this by viewing the path planning problem as the two subproblems of search and approximation and using advanced graph-search techniques on a sampling-based approximation. This perspective leads to Advanced BIT*. ABIT* combines truncated anytime graph-based searches, such as ATD*, with anytime almost-surely asymptotically optimal sampling-based planners, such as RRT*. This allows it to quickly find initial solutions and then converge towards the optimum in an anytime manner. ABIT* outperforms existing single-query, sampling-based planners on the tested problems in $\mathbb{R}^{4}$ and $\mathbb{R}^{8}$, and was demonstrated on real-world problems with NASA/JPL-Caltech.