 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Benchmark for Optimal Multi-Modal Multi-Robot Multi-Goal Path Planning with Given Robot Assignment
Mar 05, 2025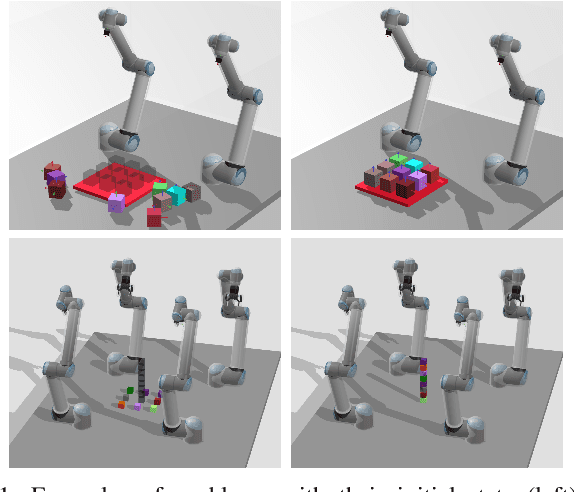
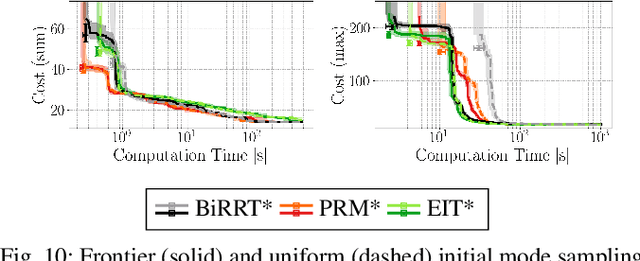

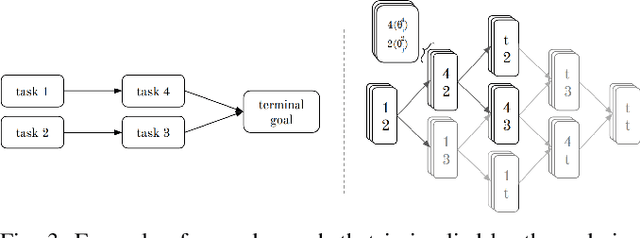
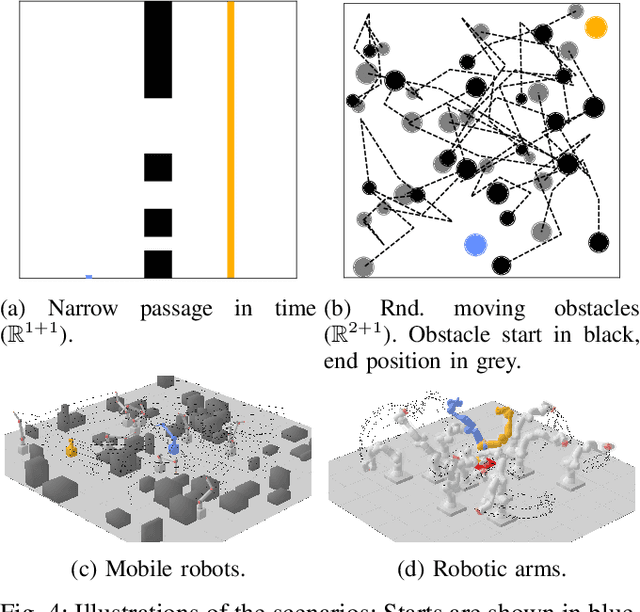
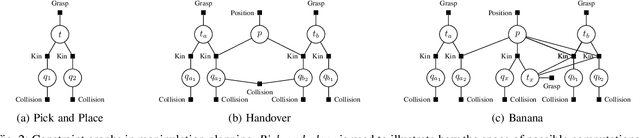
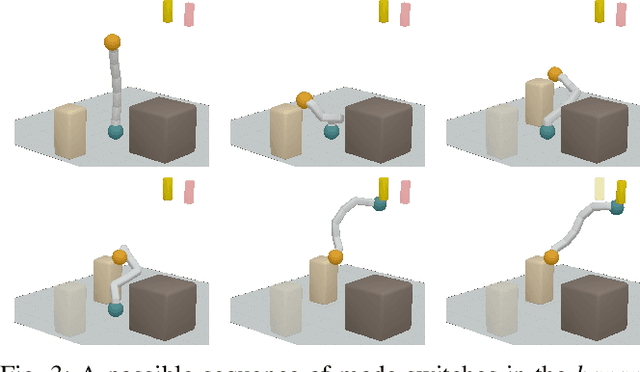
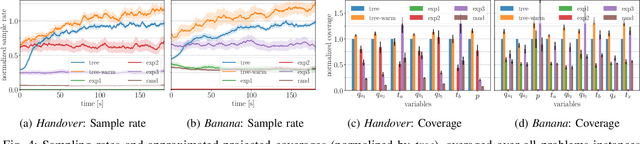
In many industrial robotics applications, multiple robots are working in a shared workspace to complete a set of tasks as quickly as possible. Such settings can be treated as multi-modal multi-robot multi-goal path planning problems, where each robot has to reach an ordered sequence of goals. Existing approaches to this type of problem solve this using prioritization or assume synchronous completion of tasks, and are thus neither optimal nor complete. We formalize this problem as a single path planning problem and introduce a benchmark encompassing a diverse range of problem instances including scenarios with various robots, planning horizons, and collaborative tasks such as handovers. Along with the benchmark, we adapt an RRT* and a PRM* planner to serve as a baseline for the planning problems. Both planners work in the composite space of all robots and introduce the required changes to work in our setting. Unlike existing approaches, our planner and formulation is not restricted to discretized 2D workspaces, supports a changing environment, and works for heterogeneous robot teams over multiple modes with different constraints, and multiple goals. Videos and code for the benchmark and the planners is available at https://vhartman.github.io/mrmg-planning/.
A comparison of visual representations for real-world reinforcement learning in the context of vacuum gripping
Mar 04, 2025
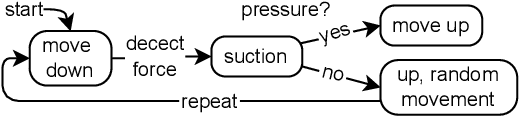


When manipulating objects in the real world, we need reactive feedback policies that take into account sensor information to inform decisions. This study aims to determine how different encoders can be used in a reinforcement learning (RL) framework to interpret the spatial environment in the local surroundings of a robot arm. Our investigation focuses on comparing real-world vision with 3D scene inputs, exploring new architectures in the process. We built on the SERL framework, providing us with a sample efficient and stable RL foundation we could build upon, while keeping training times minimal. The results of this study indicate that spatial information helps to significantly outperform the visual counterpart, tested on a box picking task with a vacuum gripper. The code and videos of the evaluations are available at https://github.com/nisutte/voxel-serl.
iDb-RRT: Sampling-based Kinodynamic Motion Planning with Motion Primitives and Trajectory Optimization
Mar 16, 2024


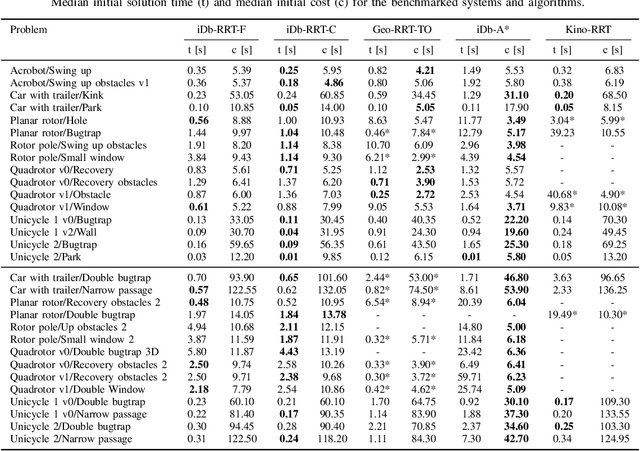
Rapidly-exploring Random Trees (RRT) and its variations have emerged as a robust and efficient tool for finding collision-free paths in robotic systems. However, adding dynamic constraints makes the motion planning problem significantly harder, as it requires solving two-value boundary problems (computationally expensive) or propagating random control inputs (uninformative). Alternatively, Iterative Discontinuity Bounded A* (iDb-A*), introduced in our previous study, combines search and optimization iteratively. The search step connects short trajectories (motion primitives) while allowing a bounded discontinuity between the motion primitives, which is later repaired in the trajectory optimization step. Building upon these foundations, in this paper, we present iDb-RRT, a sampling-based kinodynamic motion planning algorithm that combines motion primitives and trajectory optimization within the RRT framework. iDb-RRT is probabilistically complete and can be implemented in forward or bidirectional mode. We have tested our algorithm across a benchmark suite comprising 30 problems, spanning 8 different systems, and shown that iDb-RRT can find solutions up to 10x faster than previous methods, especially in complex scenarios that require long trajectories or involve navigating through narrow passages.
iDb-A*: Iterative Search and Optimization for Optimal Kinodynamic Motion Planning
Nov 06, 2023



Motion planning for robotic systems with complex dynamics is a challenging problem. While recent sampling-based algorithms achieve asymptotic optimality by propagating random control inputs, their empirical convergence rate is often poor, especially in high-dimensional systems such as multirotors. An alternative approach is to first plan with a simplified geometric model and then use trajectory optimization to follow the reference path while accounting for the true dynamics. However, this approach may fail to produce a valid trajectory if the initial guess is not close to a dynamically feasible trajectory. In this paper, we present Iterative Discontinuity Bounded A* (iDb-A*), a novel kinodynamic motion planner that combines search and optimization iteratively. The search step utilizes a finite set of short trajectories (motion primitives) that are interconnected while allowing for a bounded discontinuity between them. The optimization step locally repairs the discontinuities with trajectory optimization. By progressively reducing the allowed discontinuity and incorporating more motion primitives, our algorithm achieves asymptotic optimality with excellent any-time performance. We provide a benchmark of 43 problems across eight different dynamical systems, including different versions of unicycles and multirotors. Compared to state-of-the-art methods, iDb-A* consistently solves more problem instances and finds lower-cost solutions more rapidly.
Towards computing low-makespan solutions for multi-arm multi-task planning problems
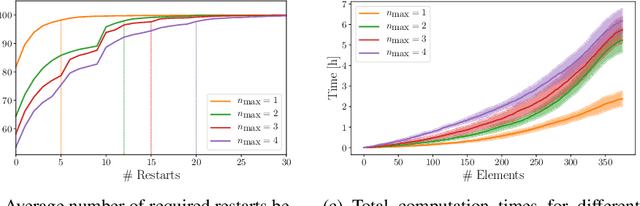
Jun 02, 2023We propose an approach to find low-makespan solutions to multi-robot multi-task planning problems in environments where robots block each other from completing tasks simultaneously. We introduce a formulation of the problem that allows for an approach based on greedy descent with random restarts for generation of the task assignment and task sequence. We then use a multi-agent path planner to evaluate the makespan of a given assignment and sequence. The planner decomposes the problem into multiple simple subproblems that only contain a single robots and a single task, and can thus be solved quickly to produce a solution for a fixed task sequence. The solutions to the subproblems are then combined to form a valid solution to the original problem. We showcase the approach on robotic stippling and robotic bin picking with up to 4 robot arms. The makespan of the solutions found by our algorithm are up to 30% lower compared to a greedy approach.
Efficient Path Planning In Manipulation Planning Problems by Actively Reusing Validation Effort
Mar 01, 2023The path planning problems arising in manipulation planning and in task and motion planning settings are typically repetitive: the same manipulator moves in a space that only changes slightly. Despite this potential for reuse of information, few planners fully exploit the available information. To better enable this reuse, we decompose the collision checking into reusable, and non-reusable parts. We then treat the sequences of path planning problems in manipulation planning as a multiquery path planning problem. This allows the usage of planners that actively minimize planning effort over multiple queries, and by doing so, actively reuse previous knowledge. We implement this approach in EIRM* and effort ordered LazyPRM*, and benchmark it on multiple simulated robotic examples. Further, we show that the approach of decomposing collision checks additionally enables the reuse of the gained knowledge over multiple different instances of the same problem, i.e., in a multiquery manipulation planning scenario. The planners using the decomposed collision checking outperform the other planners in initial solution time by up to a factor of two while providing a similar solution quality.
Effort Informed Roadmaps (EIRM*): Efficient Asymptotically Optimal Multiquery Planning by Actively Reusing Validation Effort
May 17, 2022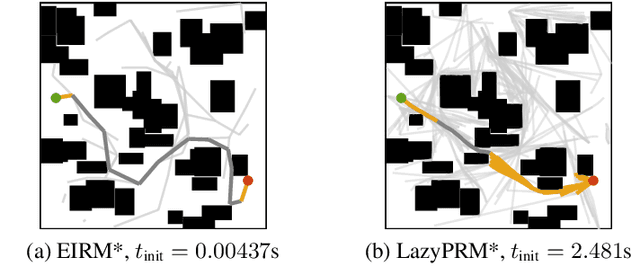
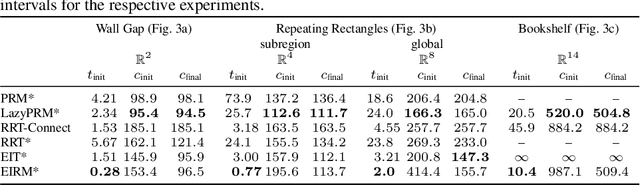
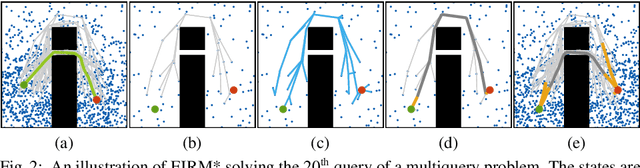
Multiquery planning algorithms find paths between various different starts and goals in a single search space. They are designed to do so efficiently by reusing information across planning queries. This information may be computed before or during the search and often includes knowledge of valid paths. Using known valid paths to solve an individual planning query takes less computational effort than finding a completely new solution. This allows multiquery algorithms, such as PRM*, to outperform single-query algorithms, such as RRT*, on many problems but their relative performance depends on how much information is reused. Despite this, few multiquery planners explicitly seek to maximize path reuse and, as a result, many do not consistently outperform single-query alternatives. This paper presents Effort Informed Roadmaps (EIRM*), an almost-surely asymptotically optimal multiquery planning algorithm that explicitly prioritizes reusing computational effort. EIRM* uses an asymmetric bidirectional search to identify existing paths that may help solve an individual planning query and then uses this information to order its search and reduce computational effort. This allows it to find initial solutions up to an order-of-magnitude faster than state-of-the-art planning algorithms on the tested abstract and robotic multiquery planning problems.
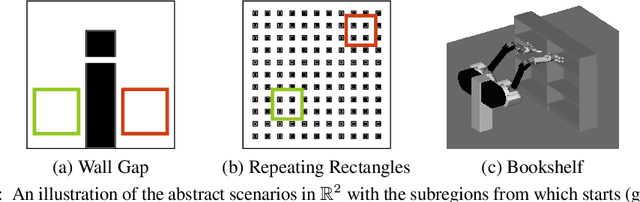
ST-RRT*: Asymptotically-Optimal Bidirectional Motion Planning through Space-Time
Mar 04, 2022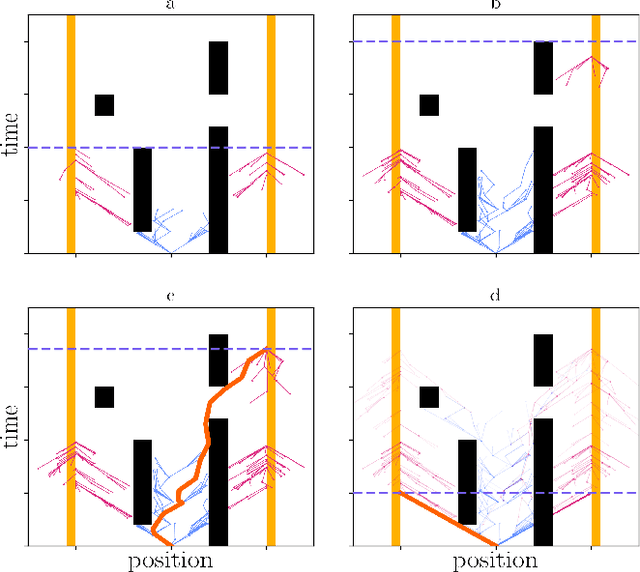
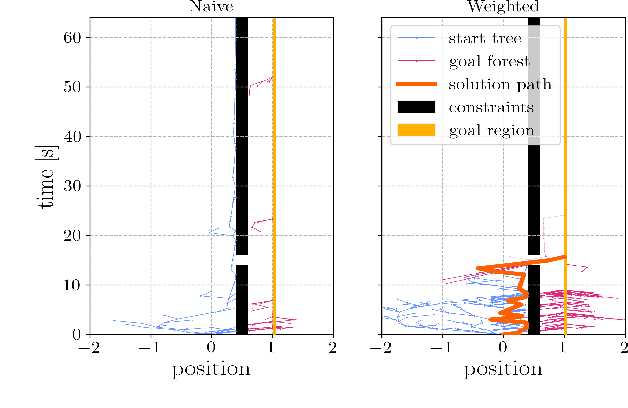
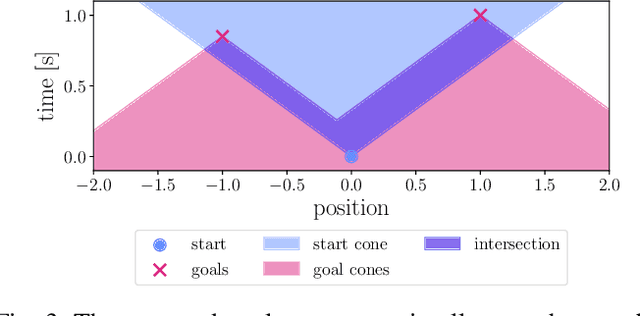
We present a motion planner for planning through space-time with dynamic obstacles, velocity constraints, and unknown arrival time. Our algorithm, Space-Time RRT* (ST-RRT*), is a probabilistically complete, bidirectional motion planning algorithm, which is asymptotically optimal with respect to the shortest arrival time. We experimentally evaluate ST-RRT* in both abstract (2D disk, 8D disk in cluttered spaces, and on a narrow passage problem), and simulated robotic path planning problems (sequential planning of 8DoF mobile robots, and 7DoF robotic arms). The proposed planner outperforms RRT-Connect and RRT* on both initial solution time, and attained final solution cost. The code for ST-RRT* is available in the Open Motion Planning Library (OMPL).
Learning Efficient Constraint Graph Sampling for Robotic Sequential Manipulation
Nov 09, 2020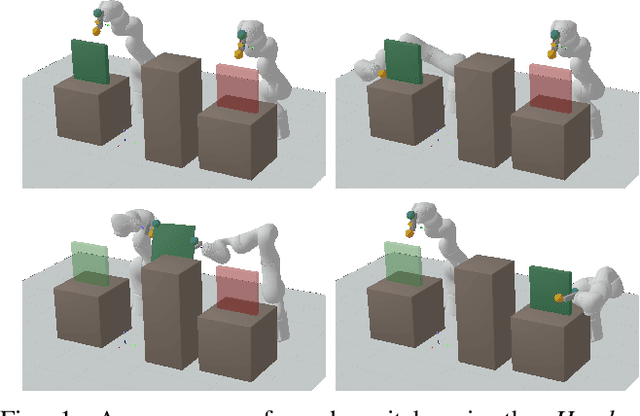
Efficient sampling from constraint manifolds, and thereby generating a diverse set of solutions of feasibility problems, is a fundamental challenge. We consider the case where a problem is factored, that is, the underlying nonlinear mathematical program is decomposed into differentiable equality and inequality constraints, each of which depends only on some variables. Such problems are at the core of efficient and robust sequential robot manipulation planning. Naive sequential conditional sampling of individual variables, as well as fully joint sampling of all variables at once (e.g., leveraging optimization methods), can be highly inefficient and non-robust. We propose a novel framework to learn how to break the overall problem into smaller sequential sampling problems. Specifically, we leverage Monte-Carlo Tree Search to learn which variable subsets should be assigned in which sequential order, in order to minimize the computation time to generate full samples. This strategy allows us to efficiently compute a set of diverse valid robot configurations for mode-switches within sequential manipulation tasks, which are waypoints for subsequent trajectory optimization or sampling-based motion planning algorithms. We show that the learning method quickly converges to the best sampling strategy for a given problem, and outperforms user-defined orderings and joint optimization, while also providing a higher sample diversity. Video: https://youtu.be/xWAjBGACZhs
Robust Task and Motion Planning for Long-Horizon Architectural Construction Planning
Mar 17, 2020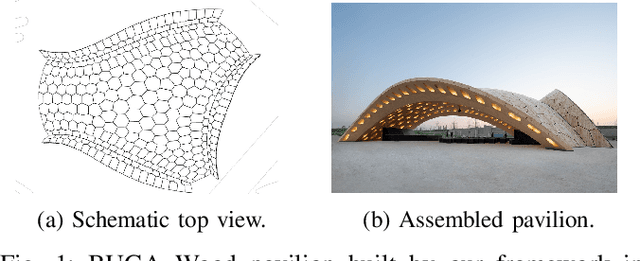
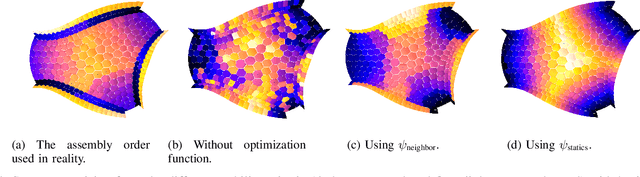
Integrating robotic systems in architectural and construction processes is of core interest to increase the efficiency of the building industry. Automated planning for such systems enables design analysis tools and facilitates faster design iteration cycles for designers and engineers. However, generic task-and-motion planning (TAMP) for long-horizon construction processes is beyond the capabilities of current approaches. In this paper, we develop a multi-agent TAMP framework for long horizon problems such as constructing a full-scale building. To this end we extend the Logic-Geometric Programming framework by sampling-based motion planning,a limited horizon approach, and a task-specific structural stability optimization that allow an effective decomposition of the task. We show that our framework is capable of constructing a large pavilion built from several hundred geometrically unique building elements from start to end autonomously.