 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Global Intent Inference for Human Motion by Inverse Reinforcement Learning
Mar 08, 2026This paper investigates whether a single, unified cost function can explain and predict human reaching movements, in contrast with existing approaches that rely on subject- or posture-specific optimization criteria. Using the Minimal Observation Inverse Reinforcement Learning (MO-IRL) algorithm, together with a seven-dimensional set of candidate cost terms, we efficiently estimate time-varying cost weights for a standard planar reaching task. MO-IRL provides orders-of-magnitude faster convergence than bilevel formulations, while using only a fraction of the available data, enabling the practical exploration of time-varying cost structures. Three levels of generality are evaluated: Subject-Dependent Posture-Dependent, Subject-Dependent Posture-Independent, and Subject-Independent Posture-Independent. Across all cases, time-varying weights substantially improve trajectory reconstruction, yielding an average 27% reduction in RMSE compared to the baseline. The inferred costs consistently highlight a dominant role for joint-acceleration regulation, complemented by smaller contributions from torque-change smoothness. Overall, a single subject- and posture-agnostic time-varying cost function is shown to predict human reaching trajectories with high accuracy, supporting the existence of a unified optimality principle governing this class of movements.
Hippo: High-performance Interior-Point and Projection-based Solver for Generic Constrained Trajectory Optimization
Mar 01, 2026Trajectory optimization is the core of modern model-based robotic control and motion planning. Existing trajectory optimizers, based on sequential quadratic programming (SQP) or differential dynamic programming (DDP), are often limited by their slow computation efficiency, low modeling flexibility, and poor convergence for complex tasks requiring hard constraints. In this paper, we introduce Hippo, a solver that can handle inequality constraints using the interior-point method (IPM) with an adaptive barrier update strategy and hard equality constraints via projection or IPM. Through extensive numerical benchmarks, we show that Hippo is a robust and efficient alternative to existing state-of-the-art solvers for difficult robotic trajectory optimization problems requiring high-quality solutions, such as locomotion and manipulation.
Coupled Local and Global World Models for Efficient First Order RL
Feb 05, 2026World models offer a promising avenue for more faithfully capturing complex dynamics, including contacts and non-rigidity, as well as complex sensory information, such as visual perception, in situations where standard simulators struggle. However, these models are computationally complex to evaluate, posing a challenge for popular RL approaches that have been successfully used with simulators to solve complex locomotion tasks but yet struggle with manipulation. This paper introduces a method that bypasses simulators entirely, training RL policies inside world models learned from robots' interactions with real environments. At its core, our approach enables policy training with large-scale diffusion models via a novel decoupled first-order gradient (FoG) method: a full-scale world model generates accurate forward trajectories, while a lightweight latent-space surrogate approximates its local dynamics for efficient gradient computation. This coupling of a local and global world model ensures high-fidelity unrolling alongside computationally tractable differentiation. We demonstrate the efficacy of our method on the Push-T manipulation task, where it significantly outperforms PPO in sample efficiency. We further evaluate our approach through an ego-centric object manipulation task with a quadruped. Together, these results demonstrate that learning inside data-driven world models is a promising pathway for solving hard-to-model RL tasks in image space without reliance on hand-crafted physics simulators.
Is open robotics innovation a threat to international peace and security?
Jan 15, 2026Open access to publication, software and hardware is central to robotics: it lowers barriers to entry, supports reproducible science and accelerates reliable system development. However, openness also exacerbates the inherent dual-use risks associated with research and innovation in robotics. It lowers barriers for states and non-state actors to develop and deploy robotics systems for military use and harmful purposes. Compared to other fields of engineering where dual-use risks are present - e.g., those that underlie the development of weapons of mass destruction (chemical, biological, radiological, and nuclear weapons) and even the field of AI, robotics offers no specific regulation and little guidance as to how research and innovation may be conducted and disseminated responsibly. While other fields can be used for guidance, robotics has its own needs and specificities which have to be taken into account. The robotics community should therefore work toward its own set of sector-specific guidance and possibly regulation. To that end, we propose a roadmap focusing on four practices: a) education in responsible robotics; b) incentivizing risk assessment; c) moderating the diffusion of high-risk material; and d) developing red lines.
Cost Function Estimation Using Inverse Reinforcement Learning with Minimal Observations
May 13, 2025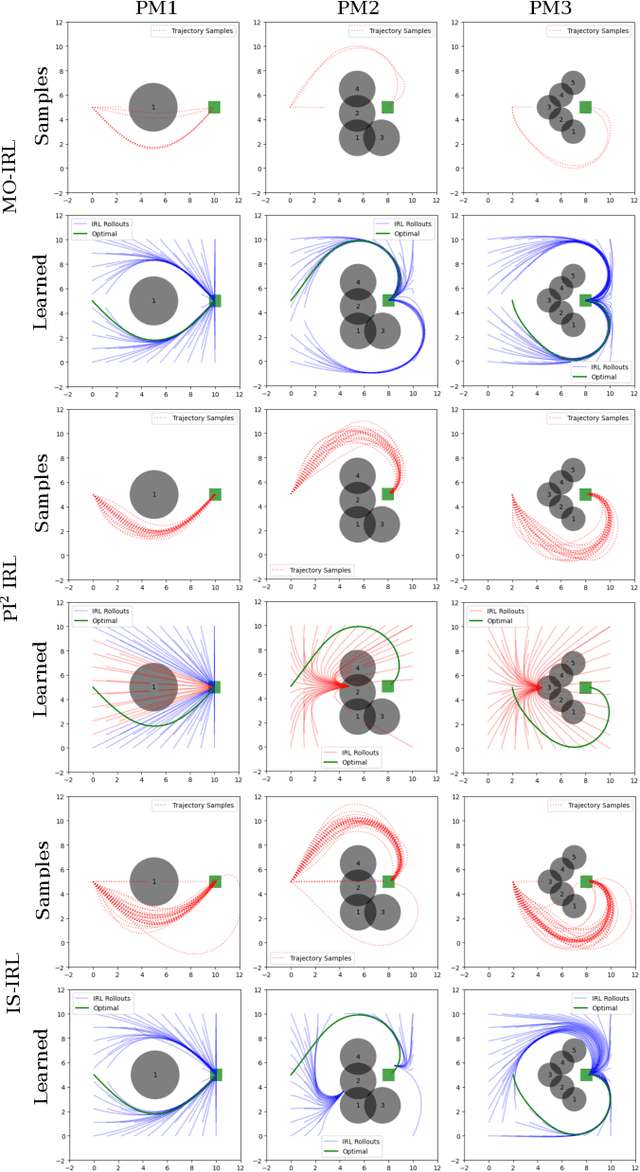



We present an iterative inverse reinforcement learning algorithm to infer optimal cost functions in continuous spaces. Based on a popular maximum entropy criteria, our approach iteratively finds a weight improvement step and proposes a method to find an appropriate step size that ensures learned cost function features remain similar to the demonstrated trajectory features. In contrast to similar approaches, our algorithm can individually tune the effectiveness of each observation for the partition function and does not need a large sample set, enabling faster learning. We generate sample trajectories by solving an optimal control problem instead of random sampling, leading to more informative trajectories. The performance of our method is compared to two state of the art algorithms to demonstrate its benefits in several simulated environments.
Infinite-Horizon Value Function Approximation for Model Predictive Control
Feb 10, 2025



Model Predictive Control has emerged as a popular tool for robots to generate complex motions. However, the real-time requirement has limited the use of hard constraints and large preview horizons, which are necessary to ensure safety and stability. In practice, practitioners have to carefully design cost functions that can imitate an infinite horizon formulation, which is tedious and often results in local minima. In this work, we study how to approximate the infinite horizon value function of constrained optimal control problems with neural networks using value iteration and trajectory optimization. Furthermore, we demonstrate how using this value function approximation as a terminal cost provides global stability to the model predictive controller. The approach is validated on two toy problems and a real-world scenario with online obstacle avoidance on an industrial manipulator where the value function is conditioned to the goal and obstacle.
Should We Learn Contact-Rich Manipulation Policies from Sampling-Based Planners?
Dec 12, 2024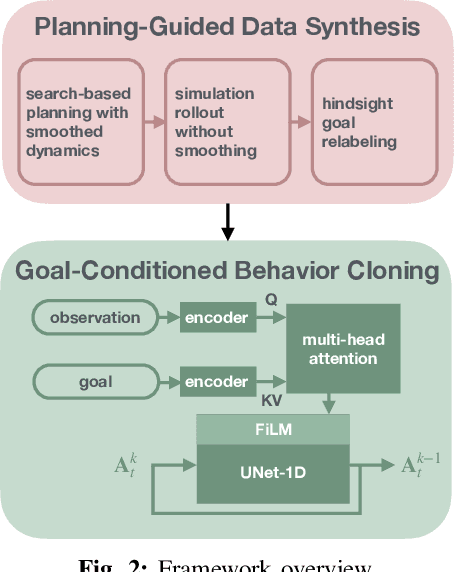
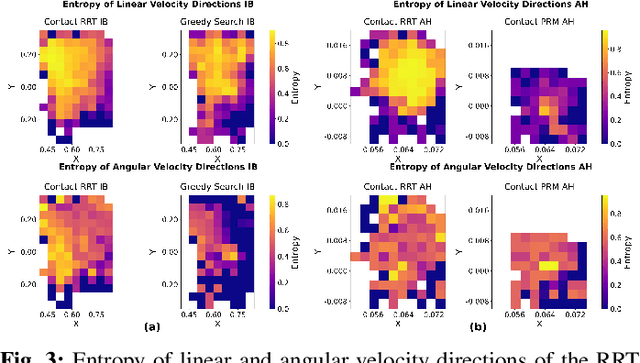

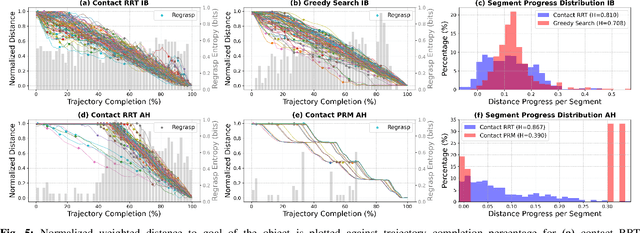
The tremendous success of behavior cloning (BC) in robotic manipulation has been largely confined to tasks where demonstrations can be effectively collected through human teleoperation. However, demonstrations for contact-rich manipulation tasks that require complex coordination of multiple contacts are difficult to collect due to the limitations of current teleoperation interfaces. We investigate how to leverage model-based planning and optimization to generate training data for contact-rich dexterous manipulation tasks. Our analysis reveals that popular sampling-based planners like rapidly exploring random tree (RRT), while efficient for motion planning, produce demonstrations with unfavorably high entropy. This motivates modifications to our data generation pipeline that prioritizes demonstration consistency while maintaining solution diversity. Combined with a diffusion-based goal-conditioned BC approach, our method enables effective policy learning and zero-shot transfer to hardware for two challenging contact-rich manipulation tasks.
Safe Reinforcement Learning of Robot Trajectories in the Presence of Moving Obstacles
Nov 08, 2024In this paper, we present an approach for learning collision-free robot trajectories in the presence of moving obstacles. As a first step, we train a backup policy to generate evasive movements from arbitrary initial robot states using model-free reinforcement learning. When learning policies for other tasks, the backup policy can be used to estimate the potential risk of a collision and to offer an alternative action if the estimated risk is considered too high. No matter which action is selected, our action space ensures that the kinematic limits of the robot joints are not violated. We analyze and evaluate two different methods for estimating the risk of a collision. A physics simulation performed in the background is computationally expensive but provides the best results in deterministic environments. If a data-based risk estimator is used instead, the computational effort is significantly reduced, but an additional source of error is introduced. For evaluation, we successfully learn a reaching task and a basketball task while keeping the risk of collisions low. The results demonstrate the effectiveness of our approach for deterministic and stochastic environments, including a human-robot scenario and a ball environment, where no state can be considered permanently safe. By conducting experiments with a real robot, we show that our approach can generate safe trajectories in real time.
Accelerated gradient descent for high frequency Model Predictive Control
Sep 26, 2024The recent promises of Model Predictive Control in robotics have motivated the development of tailored second-order methods to solve optimal control problems efficiently. While those methods benefit from strong convergence properties, tailored efficient implementations are challenging to derive. In this work, we study the potential effectiveness of first-order methods and show on a torque controlled manipulator that they can equal the performances of second-order methods.
iDb-RRT: Sampling-based Kinodynamic Motion Planning with Motion Primitives and Trajectory Optimization
Mar 16, 2024


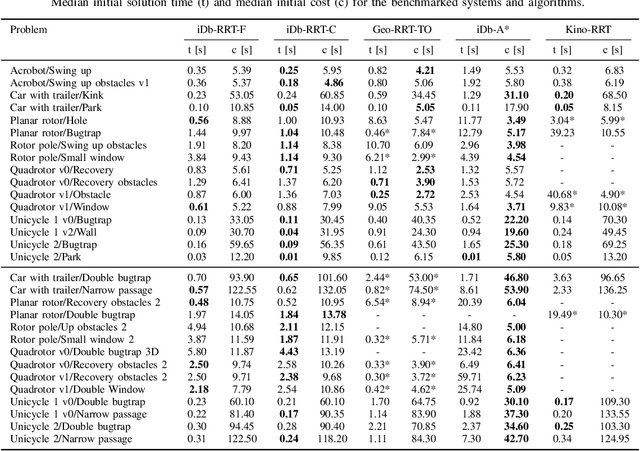
Rapidly-exploring Random Trees (RRT) and its variations have emerged as a robust and efficient tool for finding collision-free paths in robotic systems. However, adding dynamic constraints makes the motion planning problem significantly harder, as it requires solving two-value boundary problems (computationally expensive) or propagating random control inputs (uninformative). Alternatively, Iterative Discontinuity Bounded A* (iDb-A*), introduced in our previous study, combines search and optimization iteratively. The search step connects short trajectories (motion primitives) while allowing a bounded discontinuity between the motion primitives, which is later repaired in the trajectory optimization step. Building upon these foundations, in this paper, we present iDb-RRT, a sampling-based kinodynamic motion planning algorithm that combines motion primitives and trajectory optimization within the RRT framework. iDb-RRT is probabilistically complete and can be implemented in forward or bidirectional mode. We have tested our algorithm across a benchmark suite comprising 30 problems, spanning 8 different systems, and shown that iDb-RRT can find solutions up to 10x faster than previous methods, especially in complex scenarios that require long trajectories or involve navigating through narrow passages.