 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning Under Uncertainty to Localize mmWave Sources
Mar 08, 2023
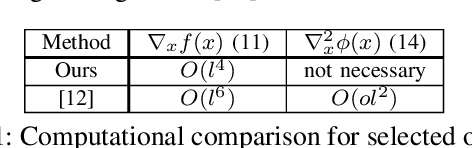
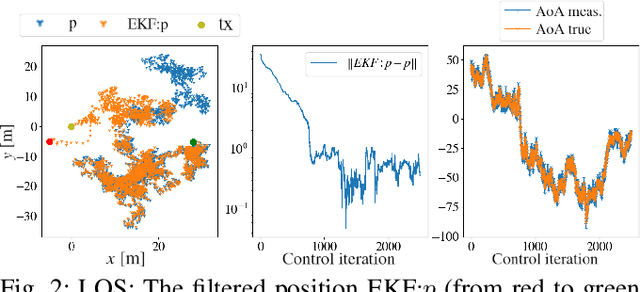
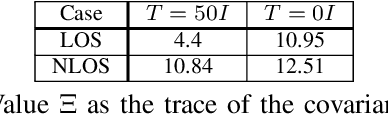
In this paper, we study a navigation problem where a mobile robot needs to locate a mmWave wireless signal. Using the directionality properties of the signal, we propose an estimation and path planning algorithm that can efficiently navigate in cluttered indoor environments. We formulate Extended Kalman filters for emitter location estimation in cases where the signal is received in line-of-sight or after reflections. We then propose to plan motion trajectories based on belief-space dynamics in order to minimize the uncertainty of the position estimates. The associated non-linear optimization problem is solved by a state-of-the-art constrained iLQR solver. In particular, we propose a method that can handle a large number of obstacles (~300) with reasonable computation times. We validate the approach in an extensive set of simulations. We show that our estimators can help increase navigation success rate and that planning to reduce estimation uncertainty can improve the overall task completion speed.
Millimeter Wave Wireless Assisted Robot Navigation with Link State Classification
Nov 05, 2021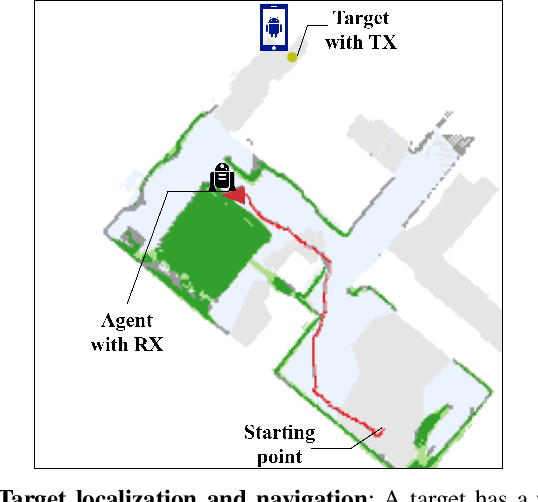

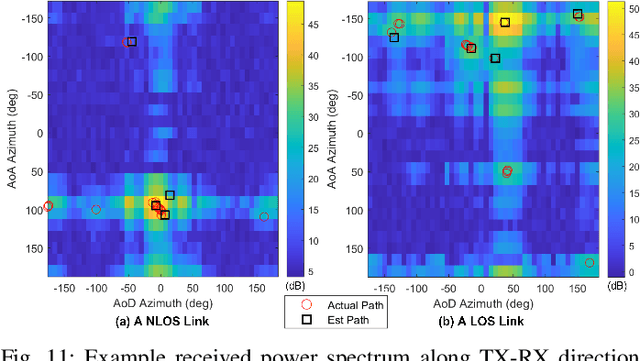
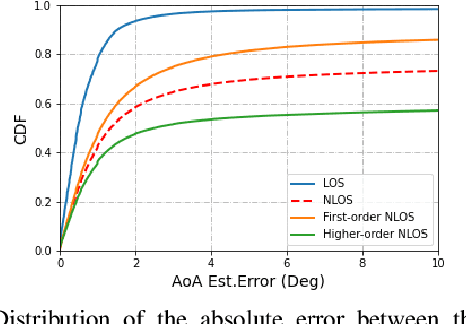
The millimeter wave (mmWave) bands have attracted considerable attention for high precision localization applications due to the ability to capture high angular and temporal resolution measurements. This paper explores mmWave-based positioning for a target localization problem where a fixed target broadcasts mmWave signals and a mobile robotic agent attempts to listen to the signals to locate and navigate to the target. A three strage procedure is proposed: First, the mobile agent uses tensor decomposition methods to detect the wireless paths and their angles. Second, a machine-learning trained classifier is then used to predict the link state, meaning if the strongest path is line-of-sight (LOS) or non-LOS (NLOS). For the NLOS case, the link state predictor also determines if the strongest path arrived via one or more reflections. Third, based on the link state, the agent either follows the estimated angles or explores the environment. The method is demonstrated on a large dataset of indoor environments supplemented with ray tracing to simulate the wireless propagation. The path estimation and link state classification are also integrated into a state-ofthe-art neural simultaneous localization and mapping (SLAM) module to augment camera and LIDAR-based navigation. It is shown that the link state classifier can successfully generalize to completely new environments outside the training set. In addition, the neural-SLAM module with the wireless path estimation and link state classifier provides rapid navigation to the target, close to a baseline that knows the target location.
WiFiMod: Transformer-based Indoor Human Mobility Modeling using Passive Sensing
Apr 20, 2021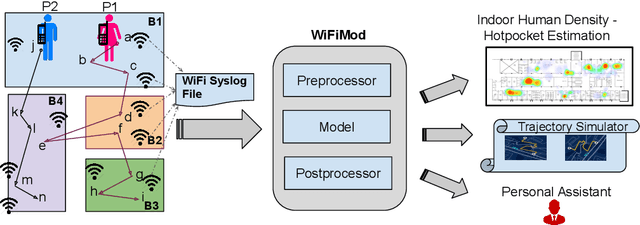
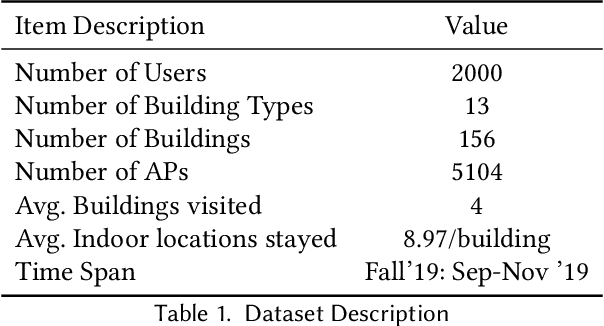
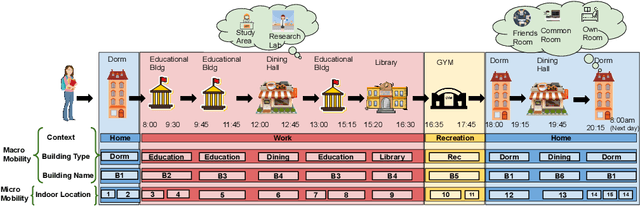
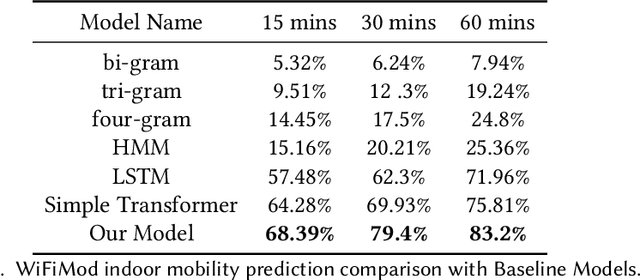
Modeling human mobility has a wide range of applications from urban planning to simulations of disease spread. It is well known that humans spend 80% of their time indoors but modeling indoor human mobility is challenging due to three main reasons: (i) the absence of easily acquirable, reliable, low-cost indoor mobility datasets, (ii) high prediction space in modeling the frequent indoor mobility, and (iii) multi-scalar periodicity and correlations in mobility. To deal with all these challenges, we propose WiFiMod, a Transformer-based, data-driven approach that models indoor human mobility at multiple spatial scales using WiFi system logs. WiFiMod takes as input enterprise WiFi system logs to extract human mobility trajectories from smartphone digital traces. Next, for each extracted trajectory, we identify the mobility features at multiple spatial scales, macro, and micro, to design a multi-modal embedding Transformer that predicts user mobility for several hours to an entire day across multiple spatial granularities. Multi-modal embedding captures the mobility periodicity and correlations across various scales while Transformers capture long-term mobility dependencies boosting model prediction performance. This approach significantly reduces the prediction space by first predicting macro mobility, then modeling indoor scale mobility, micro-mobility, conditioned on the estimated macro mobility distribution, thereby using the topological constraint of the macro-scale. Experimental results show that WiFiMod achieves a prediction accuracy of at least 10% points higher than the current state-of-art models. Additionally, we present 3 real-world applications of WiFiMod - (i) predict high-density hot pockets for policy-making decisions for COVID19 or ILI, (ii) generate a realistic simulation of indoor mobility, (iii) design personal assistants.
WiSleep: Scalable Sleep Monitoring and Analytics Using Passive WiFi Sensing
Feb 07, 2021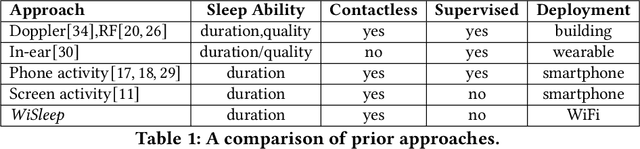
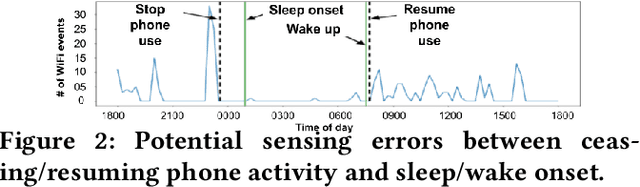
Sleep deprivation is a public health concern that significantly impacts one's well-being and performance. Sleep is an intimate experience, and state-of-the-art sleep monitoring solutions are highly-personalized to individual users. With a motivation to expand sleep monitoring at a large-scale and contribute sleep data to public health understanding, we present WiSleep, a sleep monitoring and analytics platform using smartphone network connections that are passively sensed from WiFi infrastructure. We propose an unsupervised ensemble model of Bayesian change point detection to predict sleep and wake-up times. Then, we validate our approach using ground truth from a user study in campus dormitories and a private home. Our results find WiSleep outperforming established methods for users with irregular sleep patterns while yielding comparable accuracy for regular sleepers with an average 79.5\% accuracy. This is comparable to client-side based methods, albeit utilizing only coarse-grained information. Finally, we show that WiSleep can process data from 20,000 users on a single commodity server, allowing it to scale to large campus populations with low server requirements.