 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpolation Techniques for Fast Channel Estimation in Ray Tracing
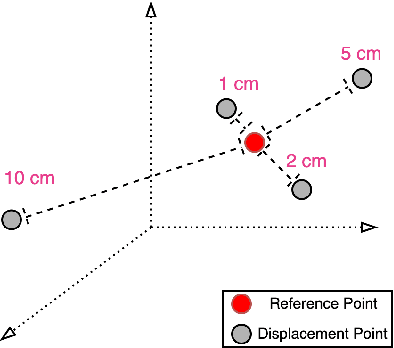
Jan 30, 2026Ray tracing is increasingly utilized in wireless system simulations to estimate channel paths. In large-scale simulations with complex environments, ray tracing at high resolution can be computationally demanding. To reduce the computation, this paper presents a novel method for conducting ray tracing at a coarse set of reference points and interpolating the channels at other locations. The key insight is to interpolate the images of reflected points. In addition to the computational savings, the method directly captures the spherical nature of each wavefront enabling fast and accurate computation of channels using line-of-sight MIMO and other wide aperture techniques. Through empirical validation and comparison with exhaustive ray tracing, we demonstrate the efficacy and practicality of our approach in achieving high-fidelity channel predictions with reduced computational resources.
* This is the authors accepted version of a paper published in the Proceedings of the 2024 58th Asilomar Conference on Signals, Systems, and Computers
Channel Modeling for FR3 Upper Mid-band via Generative Adversarial Networks
Apr 25, 2024The upper mid-band (FR3) has been recently attracting interest for new generation of mobile networks, as it provides a promising balance between spectrum availability and coverage, which are inherent limitations of the sub 6GHz and millimeter wave bands, respectively. In order to efficiently design and optimize the network, channel modeling plays a key role since FR3 systems are expected to operate at multiple frequency bands. Data-driven methods, especially generative adversarial networks (GANs), can capture the intricate relationships among data samples, and provide an appropriate tool for FR3 channel modeling. In this work, we present the architecture, link state model, and path generative network of GAN-based FR3 channel modeling. The comparison of our model greatly matches the ray-tracing simulated data.
Generalizable Wireless Navigation through Physics-Informed Reinforcement Learning in Wireless Digital Twin
Jun 11, 2023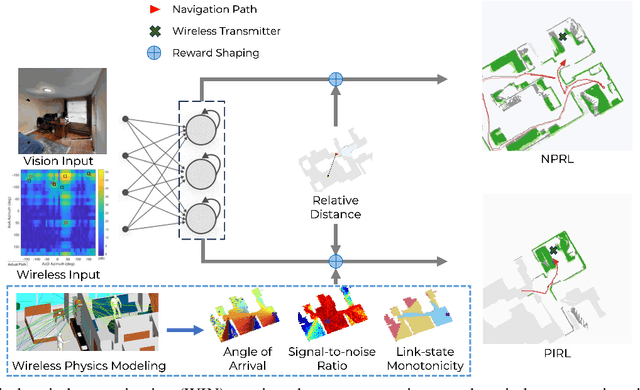
The growing focus on indoor robot navigation utilizing wireless signals has stemmed from the capability of these signals to capture high-resolution angular and temporal measurements. However, employing end-to-end generic reinforcement learning (RL) for wireless indoor navigation (WIN) in initially unknown environments remains a significant challenge, due to its limited generalization ability and poor sample efficiency. At the same time, purely model-based solutions, based on radio frequency propagation, are simple and generalizable, but unable to find optimal decisions in complex environments. This work proposes a novel physics-informed RL (PIRL) were a standard distance-to-target-based cost along with physics-informed terms on the optimal trajectory. The proposed PIRL is evaluated using a wireless digital twin (WDT) built upon simulations of a large class of indoor environments from the AI Habitat dataset augmented with electromagnetic radiation (EM) simulation for wireless signals. It is shown that the PIRL significantly outperforms both standard RL and purely physics-based solutions in terms of generalizability and performance. Furthermore, the resulting PIRL policy is explainable in that it is empirically consistent with the physics heuristic.
Path Planning Under Uncertainty to Localize mmWave Sources
Mar 08, 2023
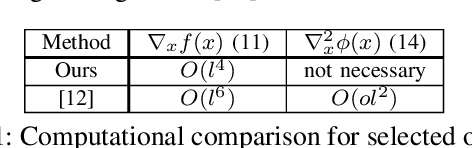
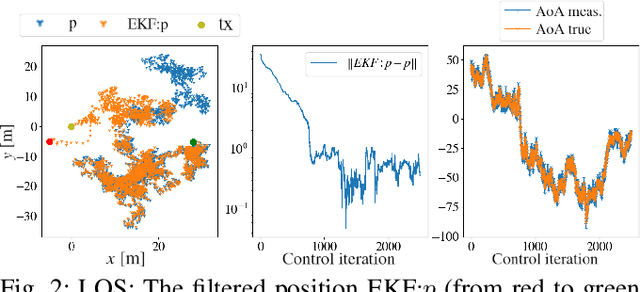
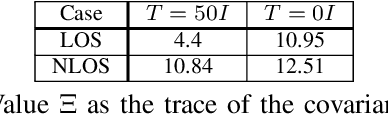
In this paper, we study a navigation problem where a mobile robot needs to locate a mmWave wireless signal. Using the directionality properties of the signal, we propose an estimation and path planning algorithm that can efficiently navigate in cluttered indoor environments. We formulate Extended Kalman filters for emitter location estimation in cases where the signal is received in line-of-sight or after reflections. We then propose to plan motion trajectories based on belief-space dynamics in order to minimize the uncertainty of the position estimates. The associated non-linear optimization problem is solved by a state-of-the-art constrained iLQR solver. In particular, we propose a method that can handle a large number of obstacles (~300) with reasonable computation times. We validate the approach in an extensive set of simulations. We show that our estimators can help increase navigation success rate and that planning to reduce estimation uncertainty can improve the overall task completion speed.
Multi-Frequency Channel Modeling for Millimeter Wave and THz Wireless Communication via Generative Adversarial Networks
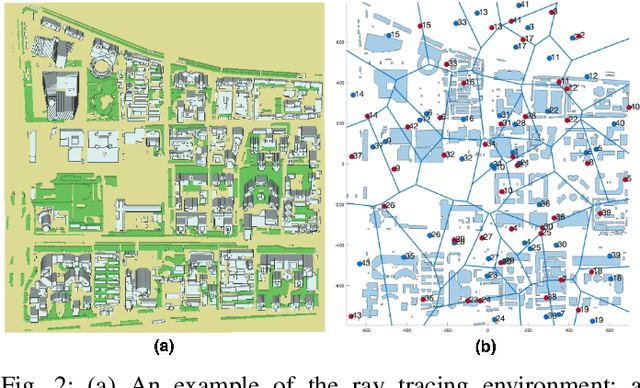
Dec 22, 2022Modern cellular systems rely increasingly on simultaneous communication in multiple discontinuous bands for macro-diversity and increased bandwidth. Multi-frequency communication is particularly crucial in the millimeter wave (mmWave) and Terahertz (THz) frequencies, as these bands are often coupled with lower frequencies for robustness. Evaluation of these systems requires statistical models that can capture the joint distribution of the channel paths across multiple frequencies. This paper presents a general neural network based methodology for training multi-frequency double directional statistical channel models. In the proposed approach, each is described as a multi-clustered set, and a generative adversarial network (GAN) is trained to generate random multi-cluster profiles where the generated cluster data includes the angles and delay of the clusters along with the vectors of random received powers, angular, and delay spread at different frequencies. The model can be readily applied for multi-frequency link or network layer simulation. The methodology is demonstrated on modeling urban micro-cellular links at 28 and 140 GHz trained from extensive ray tracing data. The methodology makes minimal statistical assumptions and experiments show the model can capture interesting statistical relationships between frequencies.
Wireless Channel Prediction in Partially Observed Environments
Jul 03, 2022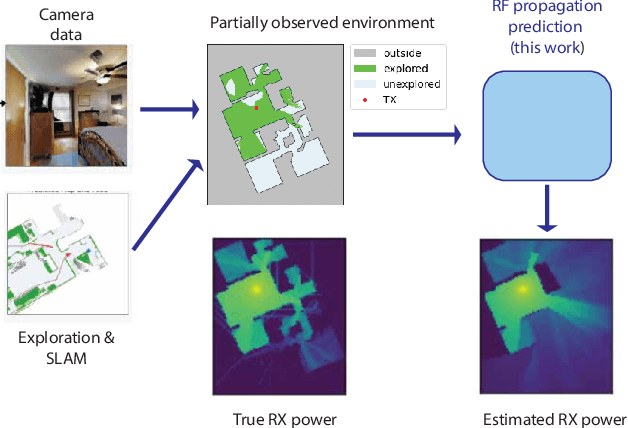

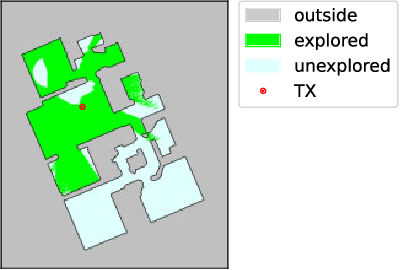

Site-specific radio frequency (RF) propagation prediction increasingly relies on models built from visual data such as cameras and LIDAR sensors. When operating in dynamic settings, the environment may only be partially observed. This paper introduces a method to extract statistical channel models, given partial observations of the surrounding environment. We propose a simple heuristic algorithm that performs ray tracing on the partial environment and then uses machine-learning trained predictors to estimate the channel and its uncertainty from features extracted from the partial ray tracing results. It is shown that the proposed method can interpolate between fully statistical models when no partial information is available and fully deterministic models when the environment is completely observed. The method can also capture the degree of uncertainty of the propagation predictions depending on the amount of region that has been explored. The methodology is demonstrated in a robotic navigation application simulated on a set of indoor maps with detailed models constructed using state-of-the-art navigation, simultaneous localization and mapping (SLAM), and computer vision methods.
Parametrization of High-Rank Line-of-Sight MIMO Channels with Reflected Paths
May 11, 2022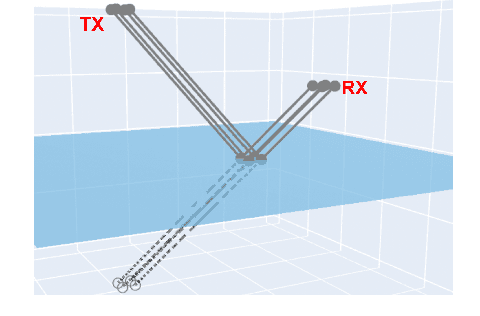
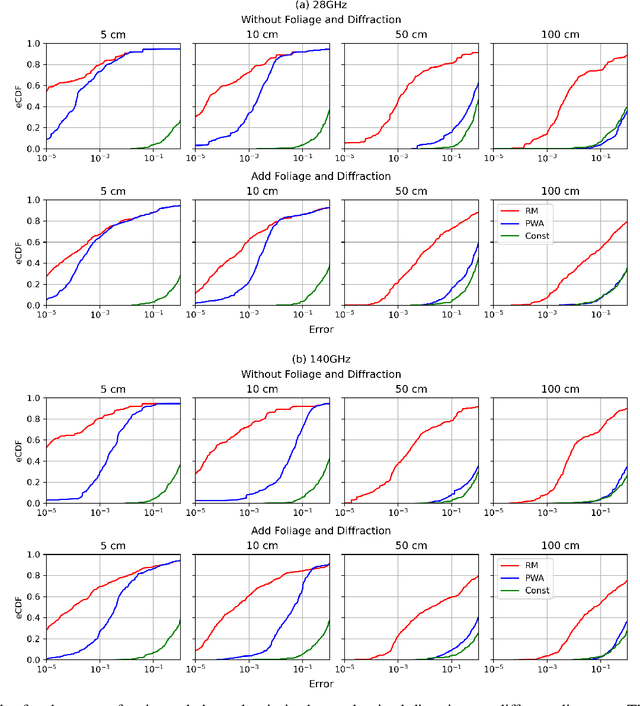
High-rank line-of-sight (LOS) MIMO systems have attracted considerable attention for millimeter wave and THz communications. The small wavelengths in these frequencies enable spatial multiplexing with massive data rates at long distances. Such systems are also being considered for multi-path non-LOS (NLOS) environments. In these scenarios, standard channels models based on plane waves cannot capture the curvature of each wave front necessary to model spatial multiplexing. This work presents a novel and simple multi-path wireless channel parametrization where each path is replaced by a LOS path with a reflected image source. The model fully captures the spherical nature of each wave front and uses only two additional parameters relative to the standard plane wave model. Moreover, the parameters can be easily captured in standard ray tracing. The accuracy of the approach is demonstrated on detailed ray tracing simulations at 28GHz and 140GHz in a dense urban area.
Millimeter Wave Wireless Assisted Robot Navigation with Link State Classification
Nov 05, 2021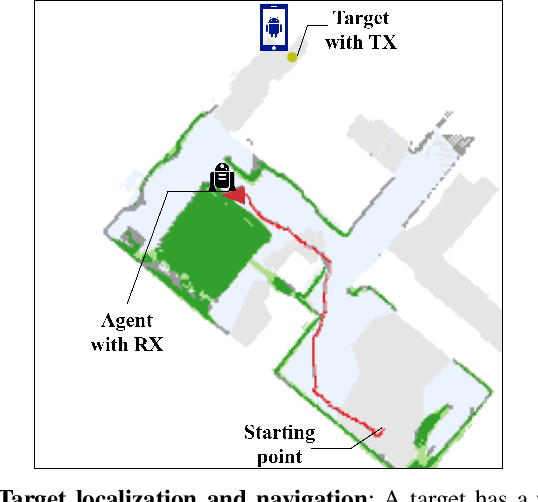

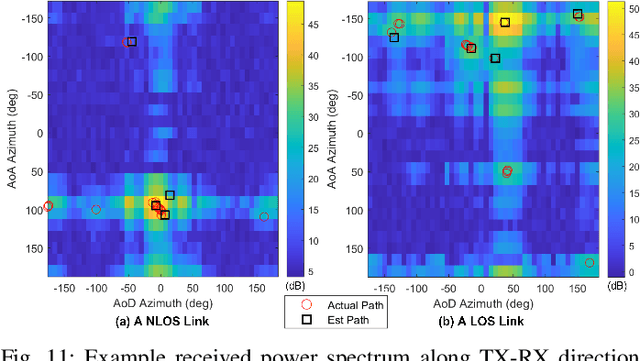
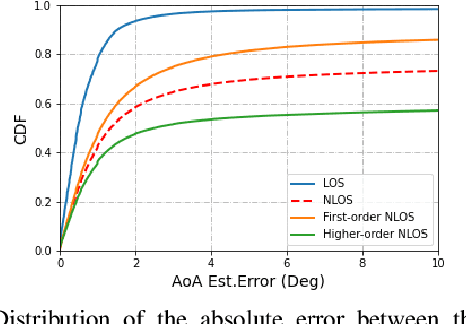
The millimeter wave (mmWave) bands have attracted considerable attention for high precision localization applications due to the ability to capture high angular and temporal resolution measurements. This paper explores mmWave-based positioning for a target localization problem where a fixed target broadcasts mmWave signals and a mobile robotic agent attempts to listen to the signals to locate and navigate to the target. A three strage procedure is proposed: First, the mobile agent uses tensor decomposition methods to detect the wireless paths and their angles. Second, a machine-learning trained classifier is then used to predict the link state, meaning if the strongest path is line-of-sight (LOS) or non-LOS (NLOS). For the NLOS case, the link state predictor also determines if the strongest path arrived via one or more reflections. Third, based on the link state, the agent either follows the estimated angles or explores the environment. The method is demonstrated on a large dataset of indoor environments supplemented with ray tracing to simulate the wireless propagation. The path estimation and link state classification are also integrated into a state-ofthe-art neural simultaneous localization and mapping (SLAM) module to augment camera and LIDAR-based navigation. It is shown that the link state classifier can successfully generalize to completely new environments outside the training set. In addition, the neural-SLAM module with the wireless path estimation and link state classifier provides rapid navigation to the target, close to a baseline that knows the target location.