 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGRACE: A Unified 2D Multi-Robot Path Planning Simulator & Benchmark for Grid, Roadmap, And Continuous Environments
Mar 11, 2026Advancing Multi-Agent Pathfinding (MAPF) and Multi-Robot Motion Planning (MRMP) requires platforms that enable transparent, reproducible comparisons across modeling choices. Existing tools either scale under simplifying assumptions (grids, homogeneous agents) or offer higher fidelity with less comparable instrumentation. We present GRACE, a unified 2D simulator+benchmark that instantiates the same task at multiple abstraction levels (grid, roadmap, continuous) via explicit, reproducible operators and a common evaluation protocol. Our empirical results on public maps and representative planners enable commensurate comparisons on a shared instance set. Furthermore, we quantify the expected representation-fidelity trade-offs (MRMP solves instances at higher fidelity but lower speed, while grid/roadmap planners scale farther). By consolidating representation, execution, and evaluation, GRACE thereby aims to make cross-representation studies more comparable and provides a means to advance multi-robot planning research and its translation to practice.
CrazyMARL: Decentralized Direct Motor Control Policies for Cooperative Aerial Transport of Cable-Suspended Payloads
Sep 17, 2025Collaborative transportation of cable-suspended payloads by teams of Unmanned Aerial Vehicles (UAVs) has the potential to enhance payload capacity, adapt to different payload shapes, and provide built-in compliance, making it attractive for applications ranging from disaster relief to precision logistics. However, multi-UAV coordination under disturbances, nonlinear payload dynamics, and slack--taut cable modes remains a challenging control problem. To our knowledge, no prior work has addressed these cable mode transitions in the multi-UAV context, instead relying on simplifying rigid-link assumptions. We propose CrazyMARL, a decentralized Reinforcement Learning (RL) framework for multi-UAV cable-suspended payload transport. Simulation results demonstrate that the learned policies can outperform classical decentralized controllers in terms of disturbance rejection and tracking precision, achieving an 80% recovery rate from harsh conditions compared to 44% for the baseline method. We also achieve successful zero-shot sim-to-real transfer and demonstrate that our policies are highly robust under harsh conditions, including wind, random external disturbances, and transitions between slack and taut cable dynamics. This work paves the way for autonomous, resilient UAV teams capable of executing complex payload missions in unstructured environments.
pc-dbCBS: Kinodynamic Motion Planning of Physically-Coupled Robot Teams
May 15, 2025Motion planning problems for physically-coupled multi-robot systems in cluttered environments are challenging due to their high dimensionality. Existing methods combining sampling-based planners with trajectory optimization produce suboptimal results and lack theoretical guarantees. We propose Physically-coupled discontinuity-bounded Conflict-Based Search (pc-dbCBS), an anytime kinodynamic motion planner, that extends discontinuity-bounded CBS to rigidly-coupled systems. Our approach proposes a tri-level conflict detection and resolution framework that includes the physical coupling between the robots. Moreover, pc-dbCBS alternates iteratively between state space representations, thereby preserving probabilistic completeness and asymptotic optimality while relying only on single-robot motion primitives. Across 25 simulated and six real-world problems involving multirotors carrying a cable-suspended payload and differential-drive robots linked by rigid rods, pc-dbCBS solves up to 92% more instances than a state-of-the-art baseline and plans trajectories that are 50-60% faster while reducing planning time by an order of magnitude.
Neural-Augmented Incremental Nonlinear Dynamic Inversion for Quadrotors with Payload Adaptation
Mar 12, 2025The increasing complexity of multirotor applications has led to the need of more accurate flight controllers that can reliably predict all forces acting on the robot. Traditional flight controllers model a large part of the forces but do not take so called residual forces into account. A reason for this is that accurately computing the residual forces can be computationally expensive. Incremental Nonlinear Dynamic Inversion (INDI) is a method that computes the difference between different sensor measurements in order to estimate these residual forces. The main issue with INDI is it's reliance on special sensor measurements which can be very noisy. Recent work has also shown that residual forces can be predicted using learning-based methods. In this work, we demonstrate that a learning algorithm can predict a smoother version of INDI outputs without requiring additional sensor measurements. In addition, we introduce a new method that combines learning based predictions with INDI. We also adapt the two approaches to work on quadrotors carrying a slung-type payload. The results show that using a neural network to predict residual forces can outperform INDI while using the combination of neural network and INDI can yield even better results than each method individually.
Accelerating db-A* for Kinodynamic Motion Planning Using Diffusion
Mar 10, 2025We present a novel approach for generating motion primitives for kinodynamic motion planning using diffusion models. The motions generated by our approach are adapted to each problem instance by utilizing problem-specific parameters, allowing for finding solutions faster and of better quality. The diffusion models used in our approach are trained on randomly cut solution trajectories. These trajectories are created by solving randomly generated problem instances with a kinodynamic motion planner. Experimental results show significant improvements up to 30 percent in both computation time and solution quality across varying robot dynamics such as second-order unicycle or car with trailer.
Accelerating db-A$^\textbf{*}$ for Kinodynamic Motion Planning Using Diffusion
Mar 07, 2025We present a novel approach for generating motion primitives for kinodynamic motion planning using diffusion models. The motions generated by our approach are adapted to each problem instance by utilizing problem-specific parameters, allowing for finding solutions faster and of better quality. The diffusion models used in our approach are trained on randomly cut solution trajectories. These trajectories are created by solving randomly generated problem instances with a kinodynamic motion planner. Experimental results show significant improvements up to 30 percent in both computation time and solution quality across varying robot dynamics such as second-order unicycle or car with trailer.
Learning Approximated Maximal Safe Sets via Hypernetworks for MPC-Based Local Motion Planning
Oct 26, 2024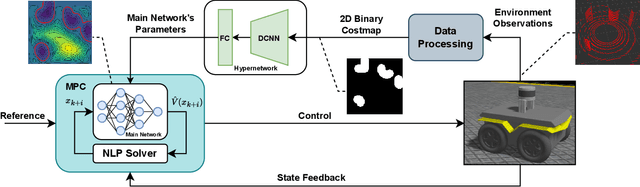
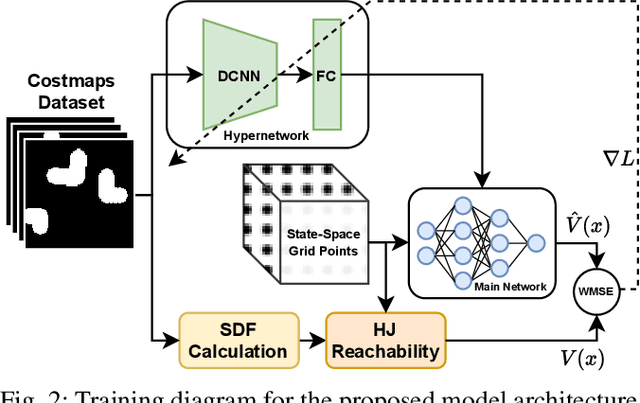
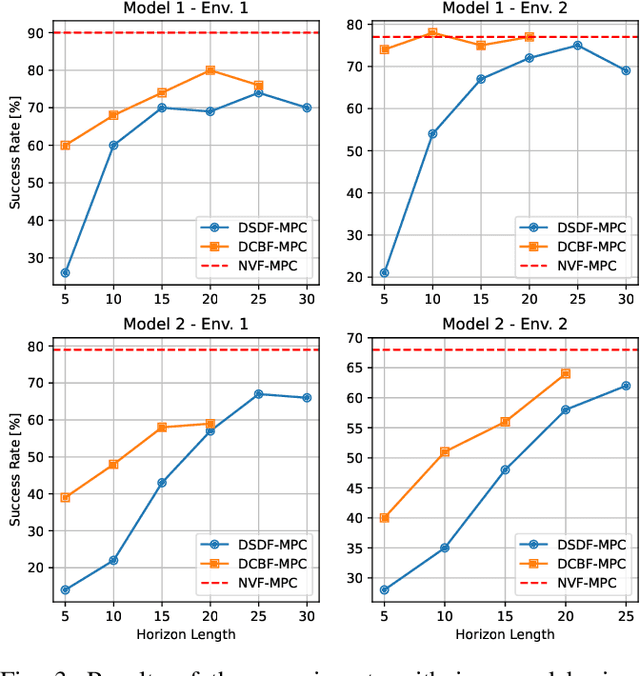
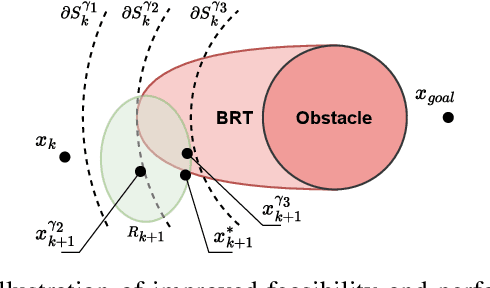
This paper presents a novel learning-based approach for online estimation of maximal safe sets for local motion planning tasks in mobile robotics. We leverage the idea of hypernetworks to achieve good generalization properties and real-time performance simultaneously. As the source of supervision, we employ the Hamilton-Jacobi (HJ) reachability analysis, allowing us to consider general nonlinear dynamics and arbitrary constraints. We integrate our model into a model predictive control (MPC) local planner as a safety constraint and compare the performance with relevant baselines in realistic 3D simulations for different environments and robot dynamics. The results show the advantages of our approach in terms of a significantly higher success rate: 2 to 18 percent over the best baseline, while achieving real-time performance.
GSRM: Building Roadmaps for Query-Efficient and Near-Optimal Path Planning Using a Reaction Diffusion System
Oct 14, 2024



Mobile robots frequently navigate on roadmaps, i.e., graphs where edges represent safe motions, in applications such as healthcare, hospitality, and warehouse automation. Often the environment is quasi-static, i.e., it is sufficient to construct a roadmap once and then use it for any future planning queries. Roadmaps are typically used with graph search algorithm to find feasible paths for the robots. Therefore, the roadmap should be well-connected, and graph searches should produce near-optimal solutions with short solution paths while simultaneously be computationally efficient to execute queries quickly. We propose a new method to construct roadmaps based on the Gray-Scott reaction diffusion system and Delaunay triangulation. Our approach, GSRM, produces roadmaps with evenly distributed vertices and edges that are well-connected even in environments with challenging narrow passages. Empirically, we compare to classical roadmaps generated by 8-connected grids, probabilistic roadmaps (PRM, SPARS2), and optimized roadmap graphs (ORM). Our results show that GSRM consistently produces superior roadmaps that are well-connected, have high query efficiency, and result in short solution paths.
* Presented at IROS 2024
iDb-RRT: Sampling-based Kinodynamic Motion Planning with Motion Primitives and Trajectory Optimization
Mar 16, 2024


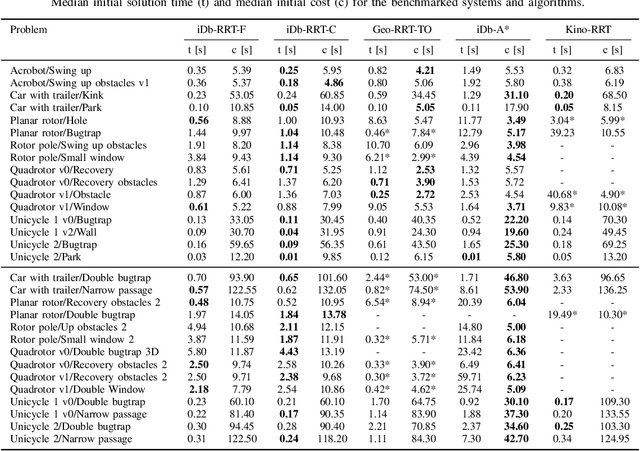
Rapidly-exploring Random Trees (RRT) and its variations have emerged as a robust and efficient tool for finding collision-free paths in robotic systems. However, adding dynamic constraints makes the motion planning problem significantly harder, as it requires solving two-value boundary problems (computationally expensive) or propagating random control inputs (uninformative). Alternatively, Iterative Discontinuity Bounded A* (iDb-A*), introduced in our previous study, combines search and optimization iteratively. The search step connects short trajectories (motion primitives) while allowing a bounded discontinuity between the motion primitives, which is later repaired in the trajectory optimization step. Building upon these foundations, in this paper, we present iDb-RRT, a sampling-based kinodynamic motion planning algorithm that combines motion primitives and trajectory optimization within the RRT framework. iDb-RRT is probabilistically complete and can be implemented in forward or bidirectional mode. We have tested our algorithm across a benchmark suite comprising 30 problems, spanning 8 different systems, and shown that iDb-RRT can find solutions up to 10x faster than previous methods, especially in complex scenarios that require long trajectories or involve navigating through narrow passages.
Joint-Space Multi-Robot Motion Planning with Learned Decentralized Heuristics
Nov 21, 2023In this paper, we present a method of multi-robot motion planning by biasing centralized, sampling-based tree search with decentralized, data-driven steer and distance heuristics. Over a range of robot and obstacle densities, we evaluate the plain Rapidly-expanding Random Trees (RRT), and variants of our method for double integrator dynamics. We show that whereas plain RRT fails in every instance to plan for $4$ robots, our method can plan for up to 16 robots, corresponding to searching through a very large 65-dimensional space, which validates the effectiveness of data-driven heuristics at combating exponential search space growth. We also find that the heuristic information is complementary; using both heuristics produces search trees with lower failure rates, nodes, and path costs when compared to using each in isolation. These results illustrate the effective decomposition of high-dimensional joint-space motion planning problems into local problems.