 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Narwhal-Inspired Sensing-to-Control Framework for Small Fixed-Wing Aircraft
Oct 08, 2025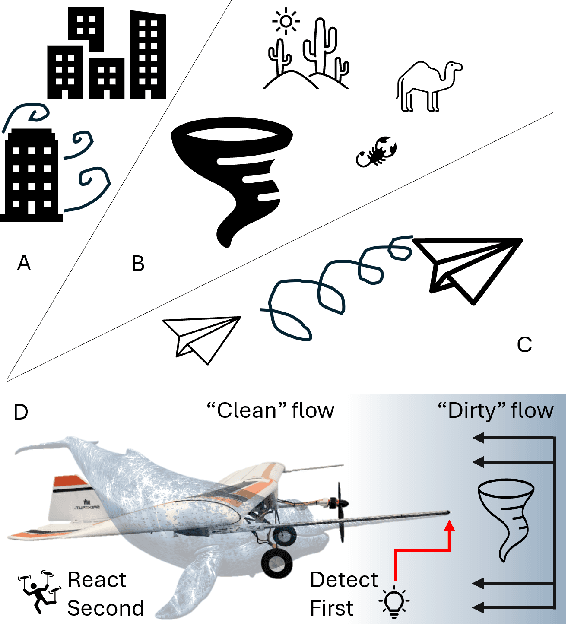
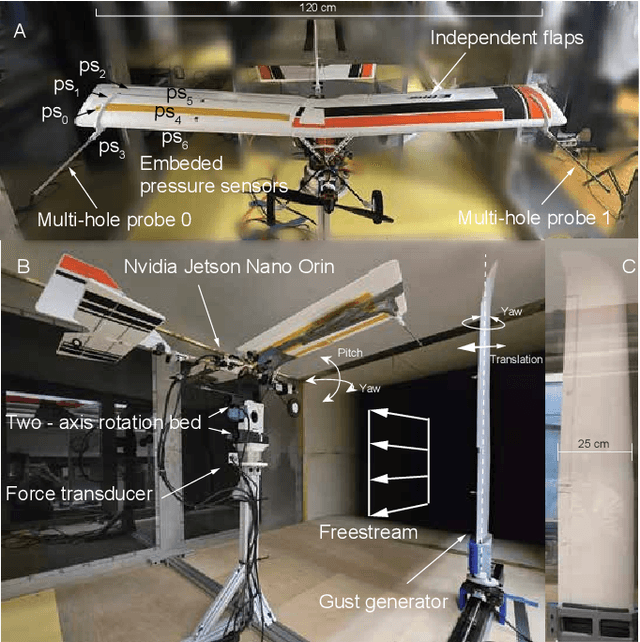
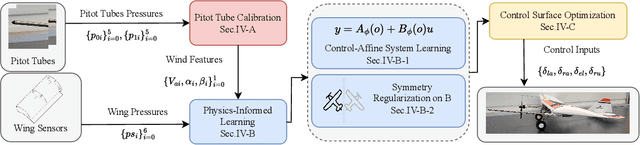
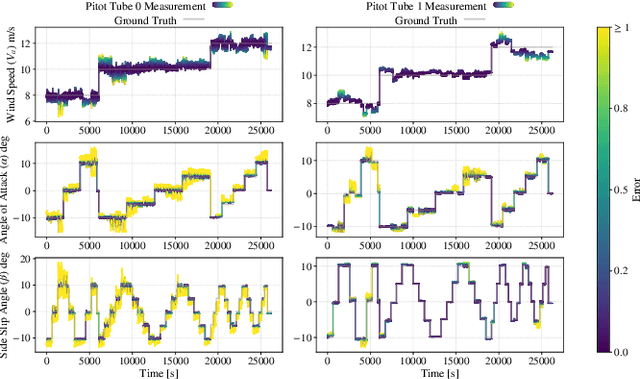
Fixed-wing unmanned aerial vehicles (UAVs) offer endurance and efficiency but lack low-speed agility due to highly coupled dynamics. We present an end-to-end sensing-to-control pipeline that combines bio-inspired hardware, physics-informed dynamics learning, and convex control allocation. Measuring airflow on a small airframe is difficult because near-body aerodynamics, propeller slipstream, control-surface actuation, and ambient gusts distort pressure signals. Inspired by the narwhal's protruding tusk, we mount in-house multi-hole probes far upstream and complement them with sparse, carefully placed wing pressure sensors for local flow measurement. A data-driven calibration maps probe pressures to airspeed and flow angles. We then learn a control-affine dynamics model using the estimated airspeed/angles and sparse sensors. A soft left/right symmetry regularizer improves identifiability under partial observability and limits confounding between wing pressures and flaperon inputs. Desired wrenches (forces and moments) are realized by a regularized least-squares allocator that yields smooth, trimmed actuation. Wind-tunnel studies across a wide operating range show that adding wing pressures reduces force-estimation error by 25-30%, the proposed model degrades less under distribution shift (about 12% versus 44% for an unstructured baseline), and force tracking improves with smoother inputs, including a 27% reduction in normal-force RMSE versus a plain affine model and 34% versus an unstructured baseline.
Morphological-Symmetry-Equivariant Heterogeneous Graph Neural Network for Robotic Dynamics Learning
Dec 02, 2024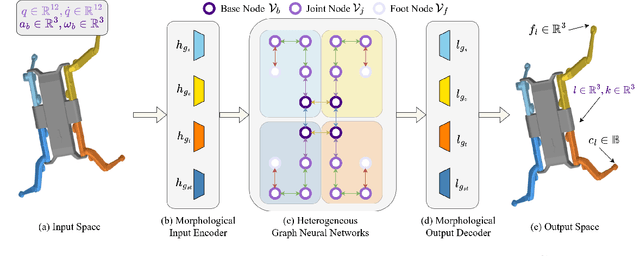
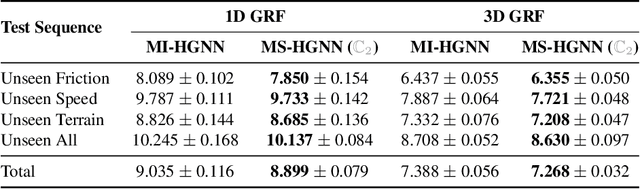
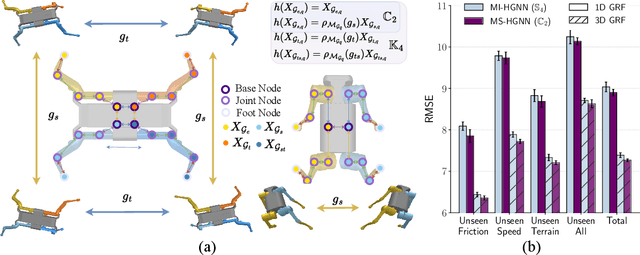

We present a morphological-symmetry-equivariant heterogeneous graph neural network, namely MS-HGNN, for robotic dynamics learning, that integrates robotic kinematic structures and morphological symmetries into a single graph network. These structural priors are embedded into the learning architecture as constraints, ensuring high generalizability, sample and model efficiency. The proposed MS-HGNN is a versatile and general architecture that is applicable to various multi-body dynamic systems and a wide range of dynamics learning problems. We formally prove the morphological-symmetry-equivariant property of our MS-HGNN and validate its effectiveness across multiple quadruped robot learning problems using both real-world and simulated data. Our code is made publicly available at https://github.com/lunarlab-gatech/MorphSym-HGNN/.
Meta-Learning Augmented MPC for Disturbance-Aware Motion Planning and Control of Quadrotors
Oct 08, 2024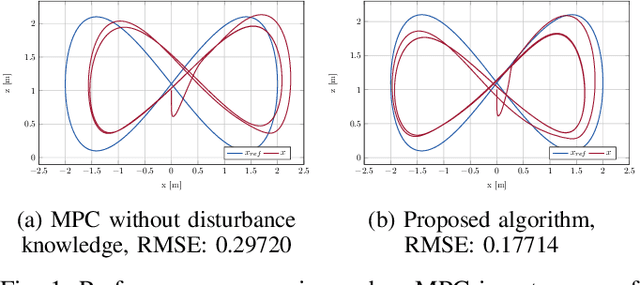
A major challenge in autonomous flights is unknown disturbances, which can jeopardize safety and lead to collisions, especially in obstacle-rich environments. This paper presents a disturbance-aware motion planning and control framework designed for autonomous aerial flights. The framework is composed of two key components: a disturbance-aware motion planner and a tracking controller. The disturbance-aware motion planner consists of a predictive control scheme and a learned model of disturbances that is adapted online. The tracking controller is designed using contraction control methods to provide safety bounds on the quadrotor behaviour in the vicinity of the obstacles with respect to the disturbance-aware motion plan. Finally, the algorithm is tested in simulation scenarios with a quadrotor facing strong crosswind and ground-induced disturbances.
MAGIC-VFM: Meta-learning Adaptation for Ground Interaction Control with Visual Foundation Models
Jul 17, 2024Control of off-road vehicles is challenging due to the complex dynamic interactions with the terrain. Accurate modeling of these interactions is important to optimize driving performance, but the relevant physical phenomena are too complex to model from first principles. Therefore, we present an offline meta-learning algorithm to construct a rapidly-tunable model of residual dynamics and disturbances. Our model processes terrain images into features using a visual foundation model (VFM), then maps these features and the vehicle state to an estimate of the current actuation matrix using a deep neural network (DNN). We then combine this model with composite adaptive control to modify the last layer of the DNN in real time, accounting for the remaining terrain interactions not captured during offline training. We provide mathematical guarantees of stability and robustness for our controller and demonstrate the effectiveness of our method through simulations and hardware experiments with a tracked vehicle and a car-like robot. We evaluate our method outdoors on different slopes with varying slippage and actuator degradation disturbances, and compare against an adaptive controller that does not use the VFM terrain features. We show significant improvement over the baseline in both hardware experimentation and simulation.
Hierarchical Meta-learning-based Adaptive Controller
Nov 23, 2023We study how to design learning-based adaptive controllers that enable fast and accurate online adaptation in changing environments. In these settings, learning is typically done during an initial (offline) design phase, where the vehicle is exposed to different environmental conditions and disturbances (e.g., a drone exposed to different winds) to collect training data. Our work is motivated by the observation that real-world disturbances fall into two categories: 1) those that can be directly monitored or controlled during training, which we call "manageable", and 2) those that cannot be directly measured or controlled (e.g., nominal model mismatch, air plate effects, and unpredictable wind), which we call "latent". Imprecise modeling of these effects can result in degraded control performance, particularly when latent disturbances continuously vary. This paper presents the Hierarchical Meta-learning-based Adaptive Controller (HMAC) to learn and adapt to such multi-source disturbances. Within HMAC, we develop two techniques: 1) Hierarchical Iterative Learning, which jointly trains representations to caption the various sources of disturbances, and 2) Smoothed Streaming Meta-Learning, which learns to capture the evolving structure of latent disturbances over time (in addition to standard meta-learning on the manageable disturbances). Experimental results demonstrate that HMAC exhibits more precise and rapid adaptation to multi-source disturbances than other adaptive controllers.
Joint-Space Multi-Robot Motion Planning with Learned Decentralized Heuristics
Nov 21, 2023In this paper, we present a method of multi-robot motion planning by biasing centralized, sampling-based tree search with decentralized, data-driven steer and distance heuristics. Over a range of robot and obstacle densities, we evaluate the plain Rapidly-expanding Random Trees (RRT), and variants of our method for double integrator dynamics. We show that whereas plain RRT fails in every instance to plan for $4$ robots, our method can plan for up to 16 robots, corresponding to searching through a very large 65-dimensional space, which validates the effectiveness of data-driven heuristics at combating exponential search space growth. We also find that the heuristic information is complementary; using both heuristics produces search trees with lower failure rates, nodes, and path costs when compared to using each in isolation. These results illustrate the effective decomposition of high-dimensional joint-space motion planning problems into local problems.