 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarinarium: a New Arena to Bring Maritime Robotics Closer to Shore
Feb 26, 2026This paper presents the Marinarium, a modular and stand-alone underwater research facility designed to provide a realistic testbed for maritime and space-analog robotic experimentation in a resource-efficient manner. The Marinarium combines a fully instrumented underwater and aerial operational volume, extendable via a retractable roof for real-weather conditions, a digital twin in the SMaRCSim simulator and tight integration with a space robotics laboratory. All of these result from design choices aimed at bridging simulation, laboratory validation, and field conditions. We compare the Marinarium to similar existing infrastructures and illustrate how its design enables a set of experiments in four open research areas within field robotics. First, we exploit high-fidelity dynamics data from the tank to demonstrate the potential of learning-based system identification approaches applied to underwater vehicles. We further highlight the versatility of the multi-domain operating volume via a rendezvous mission with a heterogeneous fleet of robots across underwater, surface, and air. We then illustrate how the presented digital twin can be utilized to reduce the reality gap in underwater simulation. Finally, we demonstrate the potential of underwater surrogates for spacecraft navigation validation by executing spatiotemporally identical inspection tasks on a planar space-robot emulator and a neutrally buoyant \gls{rov}. In this work, by sharing the insights obtained and rationale behind the design and construction of the Marinarium, we hope to provide the field robotics research community with a blueprint for bridging the gap between controlled and real offshore and space robotics experimentation.
Trajectory Tracking for Multi-Manipulator Systems in Constrained Environments
Dec 16, 2025
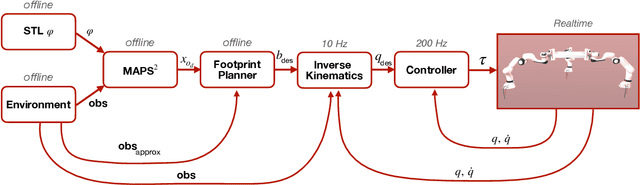


We consider the problem of cooperative manipulation by a mobile multi-manipulator system operating in obstacle-cluttered and highly constrained environments under spatio-temporal task specifications. The task requires transporting a grasped object while respecting both continuous robot dynamics and discrete geometric constraints arising from obstacles and narrow passages. To address this hybrid structure, we propose a multi-rate planning and control framework that combines offline generation of an STL-satisfying object trajectory and collision-free base footprints with online constrained inverse kinematics and continuous-time feedback control. The resulting closed-loop system enables coordinated reconfiguration of multiple manipulators while tracking the desired object motion. The approach is evaluated in high-fidelity physics simulations using three Franka Emika Panda mobile manipulators rigidly grasping an object.
Distribution-Free Stochastic MPC for Joint-in-Time Chance-Constrained Linear Systems
Dec 11, 2025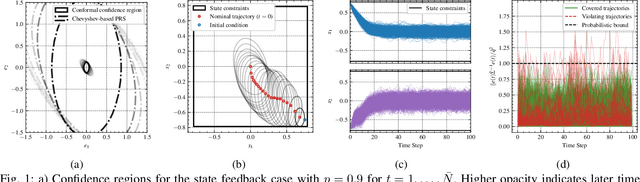
This work presents a stochastic model predictive control (MPC) framework for linear systems subject to joint-in-time chance constraints under unknown disturbance distributions. Unlike existing stochastic MPC formulations that rely on parametric or Gaussian assumptions or require expensive offline computations, the proposed method leverages conformal prediction (CP) as a streamlined tool to construct finite-sample confidence regions for the system's stochastic error trajectories with minimal computational effort. These regions enable the relaxation of probabilistic constraints while providing formal guarantees. By employing an indirect feedback mechanism and a probabilistic set-based formulation, we prove recursive feasibility of the relaxed optimization problem and establish chance constraint satisfaction in closed-loop. Furthermore, we extend the approach to the more general output feedback setting with unknown measurement noise distributions. Given available noise samples, we establish satisfaction of the joint chance constraints and recursive feasibility via output measurements alone. Numerical examples demonstrate the effectiveness and advantages of the proposed method compared to existing approaches.
Decoupled Design of Time-Varying Control Barrier Functions via Equivariances
Dec 09, 2025


This article presents a systematic method for designing time-varying Control Barrier Functions (CBF) composed of a time-invariant component and multiple time-dependent components, leveraging structural properties of the system dynamics. The method involves the construction of a specific class of time-invariant CBFs that encode the system's dynamic capabilities with respect to a given constraint, and augments them subsequently with appropriately designed time-dependent transformations. While transformations uniformly varying the time-invariant CBF can be applied to arbitrary systems, transformations exploiting structural properties in the dynamics - equivariances in particular - enable the handling of a broader and more expressive class of time-varying constraints. The article shows how to leverage such properties in the design of time-varying CBFs. The proposed method decouples the design of time variations from the computationally expensive construction of the underlying CBFs, thereby providing a computationally attractive method to the design of time-varying CBFs. The method accounts for input constraints and under-actuation, and requires only qualitative knowledge on the time-variation of the constraints making it suitable to the application in uncertain environments.
Leveraging Equivariances and Symmetries in the Control Barrier Function Synthesis
Sep 04, 2025The synthesis of Control Barrier Functions (CBFs) often involves demanding computations or a meticulous construction. However, structural properties of the system dynamics and constraints have the potential to mitigate these challenges. In this paper, we explore how equivariances in the dynamics, loosely speaking a form of symmetry, can be leveraged in the CBF synthesis. Although CBFs are generally not inherently symmetric, we show how equivariances in the dynamics and symmetries in the constraints induce symmetries in CBFs derived through reachability analysis. This insight allows us to infer their CBF values across the entire domain from their values on a subset, leading to significant computational savings. Interestingly, equivariances can be even leveraged to the CBF synthesis for non-symmetric constraints. Specifically, we show how a partially known CBF can be leveraged together with equivariances to construct a CBF for various new constraints. Throughout the paper, we provide examples illustrating the theoretical findings. Furthermore, a numerical study investigates the computational gains from invoking equivariances into the CBF synthesis.
Robust Visual Servoing under Human Supervision for Assembly Tasks
Apr 16, 2025We propose a framework enabling mobile manipulators to reliably complete pick-and-place tasks for assembling structures from construction blocks. The picking uses an eye-in-hand visual servoing controller for object tracking with Control Barrier Functions (CBFs) to ensure fiducial markers in the blocks remain visible. An additional robot with an eye-to-hand setup ensures precise placement, critical for structural stability. We integrate human-in-the-loop capabilities for flexibility and fault correction and analyze robustness to camera pose errors, proposing adapted barrier functions to handle them. Lastly, experiments validate the framework on 6-DoF mobile arms.
Efficient Coordination and Synchronization of Multi-Robot Systems Under Recurring Linear Temporal Logic
Feb 23, 2025We consider multi-robot systems under recurring tasks formalized as linear temporal logic (LTL) specifications. To solve the planning problem efficiently, we propose a bottom-up approach combining offline plan synthesis with online coordination, dynamically adjusting plans via real-time communication. To address action delays, we introduce a synchronization mechanism ensuring coordinated task execution, leading to a multi-agent coordination and synchronization framework that is adaptable to a wide range of multi-robot applications. The software package is developed in Python and ROS2 for broad deployment. We validate our findings through lab experiments involving nine robots showing enhanced adaptability compared to previous methods. Additionally, we conduct simulations with up to ninety agents to demonstrate the reduced computational complexity and the scalability features of our work.
Towards Open-Source and Modular Space Systems with ATMOS
Jan 28, 2025



In the near future, autonomous space systems will compose a large number of the spacecraft being deployed. Their tasks will involve autonomous rendezvous and proximity operations with large structures, such as inspections or assembly of orbiting space stations and maintenance and human-assistance tasks over shared workspaces. To promote replicable and reliable scientific results for autonomous control of spacecraft, we present the design of a space systems laboratory based on open-source and modular software and hardware. The simulation software provides a software-in-the-loop (SITL) architecture that seamlessly transfers simulated results to the ATMOS platforms, developed for testing of multi-agent autonomy schemes for microgravity. The manuscript presents the KTH space systems laboratory facilities and the ATMOS platform as open-source hardware and software contributions. Preliminary results showcase SITL and real testing.
Quality of Control based Resource Dimensioning for Collaborative Edge Robotics
Nov 11, 2024
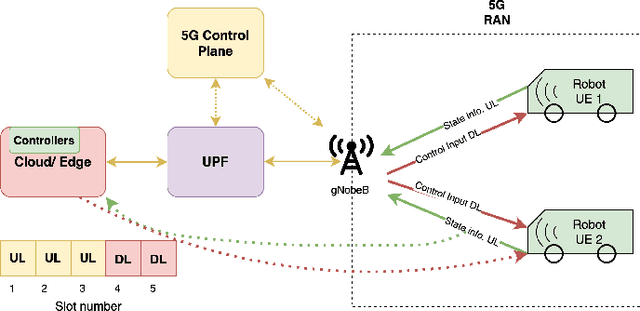
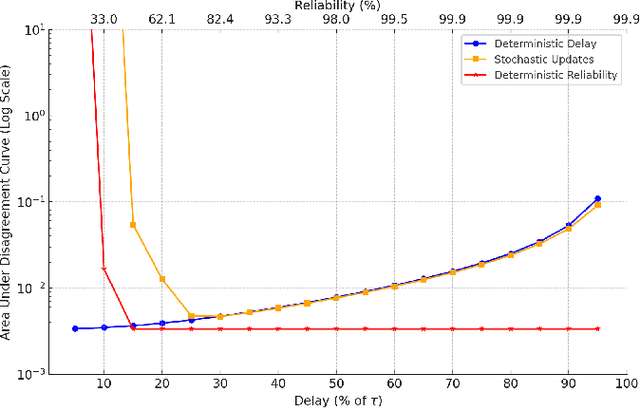
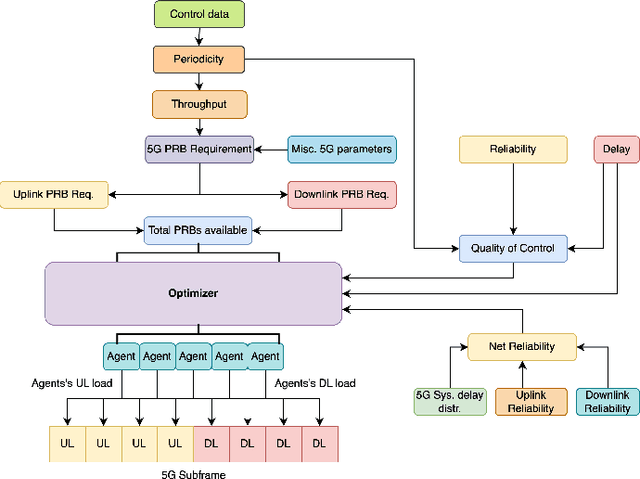
With the increasing focus on flexible automation, which emphasizes systems capable of adapting to varied tasks and conditions, exploring future deployments of cloud and edge-based network infrastructures in robotic systems becomes crucial. This work, examines how wireless solutions could support the shift from rigid, wired setups toward more adaptive, flexible automation in industrial environments. We provide a quality of control (QoC) based abstraction for robotic workloads, parameterized on loop latency and reliability, and jointly optimize system performance. The setup involves collaborative robots working on distributed tasks, underscoring how wireless communication can enable more dynamic coordination in flexible automation systems. We use our abstraction to optimally maximize the QoC ensuring efficient operation even under varying network conditions. Additionally, our solution allocates the communication resources in time slots, optimizing the balance between communication and control costs. Our simulation results highlight that minimizing the delay in the system may not always ensure the best QoC but can lead to substantial gains in QoC if delays are sometimes relaxed, allowing more packets to be delivered reliably.
Generating and Optimizing Topologically Distinct Guesses for Mobile Manipulator Path Planning
Oct 27, 2024
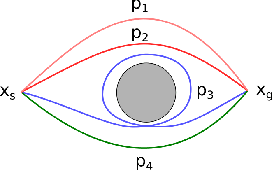
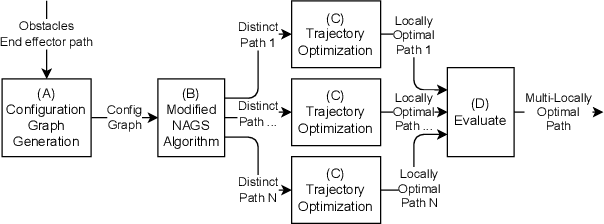
Optimal path planning often suffers from getting stuck in a local optimum. This is often the case for mobile manipulators due to nonconvexities induced by obstacles and robot kinematics. This paper attempts to circumvent this issue by proposing a pipeline to obtain multiple distinct local optima. By evaluating and selecting the optimum among multiple distinct local optima, it is likely to obtain a closer approximation of the global optimum. We demonstrate this capability in optimal path planning of nonholonomic mobile manipulators in the presence of obstacles and subject to end effector path constraints. The nonholomicity, obstacles, and end effector path constraints often cause direct optimal path planning approaches to get stuck in local optima. We demonstrate that our pipeline is able to circumvent this issue and produce a final local optimum that is close to the global optimum.