 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning with Linear Temporal Logic Specifications: Handling Quantifiable and Unquantifiable Uncertainty
Feb 26, 2025This work studies the planning problem for robotic systems under both quantifiable and unquantifiable uncertainty. The objective is to enable the robotic systems to optimally fulfill high-level tasks specified by Linear Temporal Logic (LTL) formulas. To capture both types of uncertainty in a unified modelling framework, we utilise Markov Decision Processes with Set-valued Transitions (MDPSTs). We introduce a novel solution technique for the optimal robust strategy synthesis of MDPSTs with LTL specifications. To improve efficiency, our work leverages limit-deterministic B\"uchi automata (LDBAs) as the automaton representation for LTL to take advantage of their efficient constructions. To tackle the inherent nondeterminism in MDPSTs, which presents a significant challenge for reducing the LTL planning problem to a reachability problem, we introduce the concept of a Winning Region (WR) for MDPSTs. Additionally, we propose an algorithm for computing the WR over the product of the MDPST and the LDBA. Finally, a robust value iteration algorithm is invoked to solve the reachability problem. We validate the effectiveness of our approach through a case study involving a mobile robot operating in the hexagonal world, demonstrating promising efficiency gains.
The Trembling-Hand Problem for LTLf Planning
Apr 24, 2024



Consider an agent acting to achieve its temporal goal, but with a "trembling hand". In this case, the agent may mistakenly instruct, with a certain (typically small) probability, actions that are not intended due to faults or imprecision in its action selection mechanism, thereby leading to possible goal failure. We study the trembling-hand problem in the context of reasoning about actions and planning for temporally extended goals expressed in Linear Temporal Logic on finite traces (LTLf), where we want to synthesize a strategy (aka plan) that maximizes the probability of satisfying the LTLf goal in spite of the trembling hand. We consider both deterministic and nondeterministic (adversarial) domains. We propose solution techniques for both cases by relying respectively on Markov Decision Processes and on Markov Decision Processes with Set-valued Transitions with LTLf objectives, where the set-valued probabilistic transitions capture both the nondeterminism from the environment and the possible action instruction errors from the agent. We formally show the correctness of our solution techniques and demonstrate their effectiveness experimentally through a proof-of-concept implementation.
Safe POMDP Online Planning among Dynamic Agents via Adaptive Conformal Prediction
Apr 23, 2024Online planning for partially observable Markov decision processes (POMDPs) provides efficient techniques for robot decision-making under uncertainty. However, existing methods fall short of preventing safety violations in dynamic environments. This work presents a novel safe POMDP online planning approach that offers probabilistic safety guarantees amidst environments populated by multiple dynamic agents. Our approach utilizes data-driven trajectory prediction models of dynamic agents and applies Adaptive Conformal Prediction (ACP) for assessing the uncertainties in these predictions. Leveraging the obtained ACP-based trajectory predictions, our approach constructs safety shields on-the-fly to prevent unsafe actions within POMDP online planning. Through experimental evaluation in various dynamic environments using real-world pedestrian trajectory data, the proposed approach has been shown to effectively maintain probabilistic safety guarantees while accommodating up to hundreds of dynamic agents.
Trust-Aware Motion Planning for Human-Robot Collaboration under Distribution Temporal Logic Specifications
Oct 02, 2023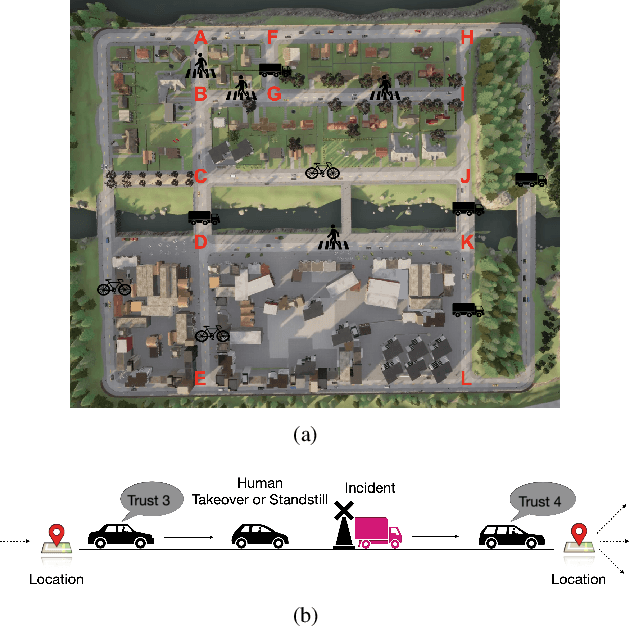
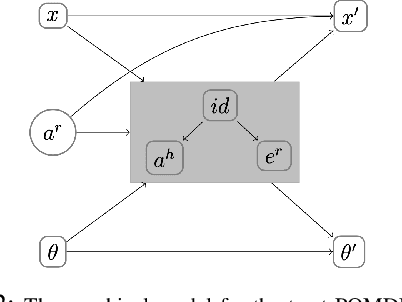

Recent work has considered trust-aware decision making for human-robot collaboration (HRC) with a focus on model learning. In this paper, we are interested in enabling the HRC system to complete complex tasks specified using temporal logic that involve human trust. Since human trust in robots is not observable, we adopt the widely used partially observable Markov decision process (POMDP) framework for modelling the interactions between humans and robots. To specify the desired behaviour, we propose to use syntactically co-safe linear distribution temporal logic (scLDTL), a logic that is defined over predicates of states as well as belief states of partially observable systems. The incorporation of belief predicates in scLDTL enhances its expressiveness while simultaneously introducing added complexity. This also presents a new challenge as the belief predicates must be evaluated over the continuous (infinite) belief space. To address this challenge, we present an algorithm for solving the optimal policy synthesis problem. First, we enhance the belief MDP (derived by reformulating the POMDP) with a probabilistic labelling function. Then a product belief MDP is constructed between the probabilistically labelled belief MDP and the automaton translation of the scLDTL formula. Finally, we show that the optimal policy can be obtained by leveraging existing point-based value iteration algorithms with essential modifications. Human subject experiments with 21 participants on a driving simulator demonstrate the effectiveness of the proposed approach.
Continuous-time control synthesis under nested signal temporal logic specifications
Sep 17, 2023Signal temporal logic (STL) has gained popularity in robotics for expressing complex specifications that may involve timing requirements or deadlines. While the control synthesis for STL specifications without nested temporal operators has been studied in the literature, the case of nested temporal operators is substantially more challenging and requires new theoretical advancements. In this work, we propose an efficient continuous-time control synthesis framework for nonlinear systems under nested STL specifications. The framework is based on the notions of signal temporal logic tree (sTLT) and control barrier function (CBF). In particular, we detail the construction of an sTLT from a given STL formula and a continuous-time dynamical system, the sTLT semantics (i.e., satisfaction condition), and the equivalence or under-approximation relation between sTLT and STL. Leveraging the fact that the satisfaction condition of an sTLT is essentially keeping the state within certain sets during certain time intervals, it provides explicit guidelines for the CBF design. The resulting controller is obtained through the utilization of an online CBF-based program coupled with an event-triggered scheme for online updating the activation time interval of each CBF, with which the correctness of the system behavior can be established by construction. We demonstrate the efficacy of the proposed method for single-integrator and unicycle models under nested STL formulas.
Reactive and human-in-the-loop planning and control of multi-robot systems under LTL specifications in dynamic environments
Jul 12, 2023


This paper investigates the planning and control problems for multi-robot systems under linear temporal logic (LTL) specifications. In contrast to most of existing literature, which presumes a static and known environment, our study focuses on dynamic environments that can have unknown moving obstacles like humans walking through. Depending on whether local communication is allowed between robots, we consider two different online re-planning approaches. When local communication is allowed, we propose a local trajectory generation algorithm for each robot to resolve conflicts that are detected on-line. In the other case, i.e., no communication is allowed, we develop a model predictive controller to reactively avoid potential collisions. In both cases, task satisfaction is guaranteed whenever it is feasible. In addition, we consider the human-in-the-loop scenario where humans may additionally take control of one or multiple robots. We design a mixed initiative controller for each robot to prevent unsafe human behaviors while guarantee the LTL satisfaction. Using our previous developed ROS software package, several experiments are conducted to demonstrate the effectiveness and the applicability of the proposed strategies.
Distributed motion coordination for multi-robot systems under LTL specifications
Mar 16, 2021This paper investigates the online motion coordination problem for a group of mobile robots moving in a shared workspace, each of which is assigned a linear temporal logic specification. Based on the realistic assumptions that each robot is subject to both state and input constraints and can have only local view and local information, a fully distributed multi-robot motion coordination strategy is proposed. For each robot, the motion coordination strategy consists of three layers. An offline layer pre-computes the braking area for each region in the workspace, the controlled transition system, and a so-called potential function. An initialization layer outputs an initially safely satisfying trajectory. An online coordination layer resolves conflicts when one occurs. The online coordination layer is further decomposed into three steps. Firstly, a conflict detection algorithm is implemented, which detects conflicts with neighboring robots. Whenever conflicts are detected, a rule is designed to assign dynamically a planning order to each pair of neighboring robots. Finally, a sampling-based algorithm is designed to generate local collision-free trajectories for the robot which at the same time guarantees the feasibility of the specification. Safety is proven to be guaranteed for all robots at any time. The effectiveness and the computational tractability of the resulting solution is verified numerically by two case studies.
A fully distributed motion coordination strategy for multi-robot systems with local information
Apr 22, 2020



This paper investigates the online motion coordination problem for a group of mobile robots moving in a shared workspace. Based on the realistic assumptions that each robot is subject to both velocity and input constraints and can have only local view and local information, a fully distributed multi-robot motion coordination strategy is proposed. Building on top of a cell decomposition, a conflict detection algorithm is presented first. Then, a rule is proposed to assign dynamically a planning order to each pair of neighboring robots, which is deadlock-free. Finally, a two-step motion planning process that combines fixed-path planning and trajectory planning is designed. The effectiveness of the resulting solution is verified by a simulation example.