 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Tracking for Multi-Manipulator Systems in Constrained Environments
Dec 16, 2025
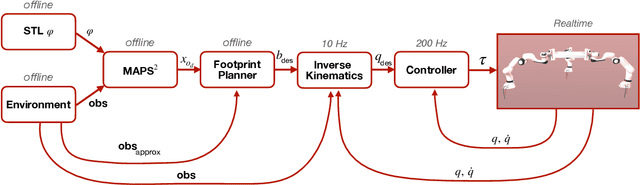


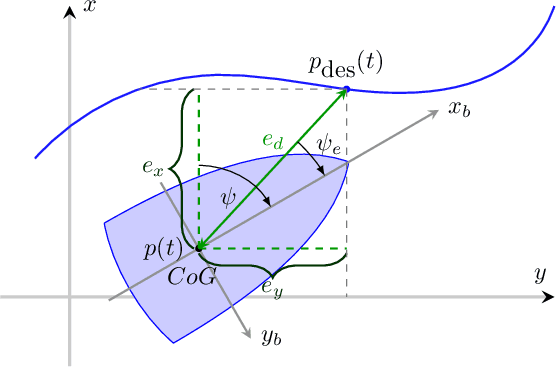
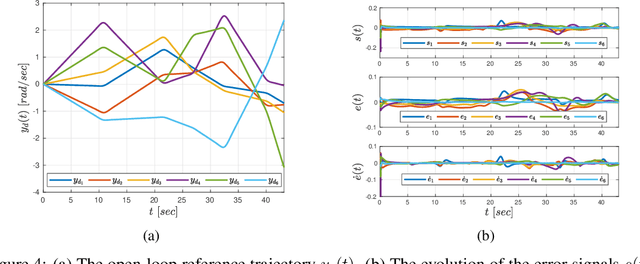
We consider the problem of cooperative manipulation by a mobile multi-manipulator system operating in obstacle-cluttered and highly constrained environments under spatio-temporal task specifications. The task requires transporting a grasped object while respecting both continuous robot dynamics and discrete geometric constraints arising from obstacles and narrow passages. To address this hybrid structure, we propose a multi-rate planning and control framework that combines offline generation of an STL-satisfying object trajectory and collision-free base footprints with online constrained inverse kinematics and continuous-time feedback control. The resulting closed-loop system enables coordinated reconfiguration of multiple manipulators while tracking the desired object motion. The approach is evaluated in high-fidelity physics simulations using three Franka Emika Panda mobile manipulators rigidly grasping an object.
Meta-Learning Augmented MPC for Disturbance-Aware Motion Planning and Control of Quadrotors
Oct 08, 2024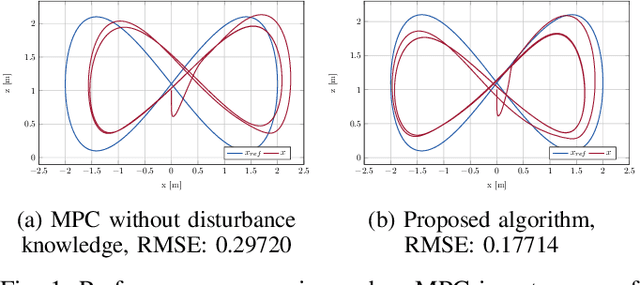
A major challenge in autonomous flights is unknown disturbances, which can jeopardize safety and lead to collisions, especially in obstacle-rich environments. This paper presents a disturbance-aware motion planning and control framework designed for autonomous aerial flights. The framework is composed of two key components: a disturbance-aware motion planner and a tracking controller. The disturbance-aware motion planner consists of a predictive control scheme and a learned model of disturbances that is adapted online. The tracking controller is designed using contraction control methods to provide safety bounds on the quadrotor behaviour in the vicinity of the obstacles with respect to the disturbance-aware motion plan. Finally, the algorithm is tested in simulation scenarios with a quadrotor facing strong crosswind and ground-induced disturbances.
MAPS$^2$: Multi-Robot Anytime Motion Planning under Signal Temporal Logic Specifications
Sep 11, 2023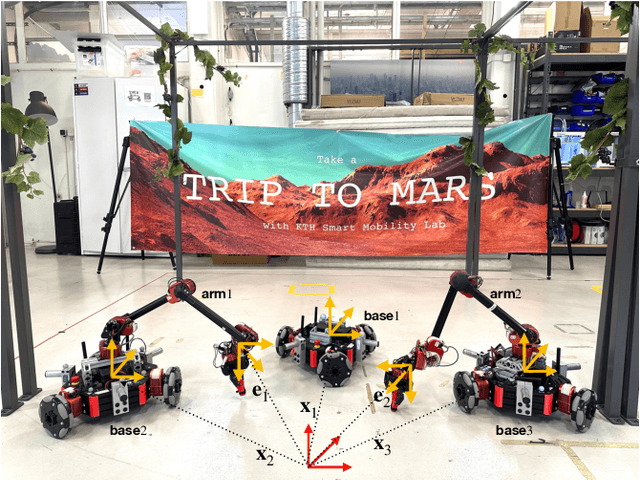
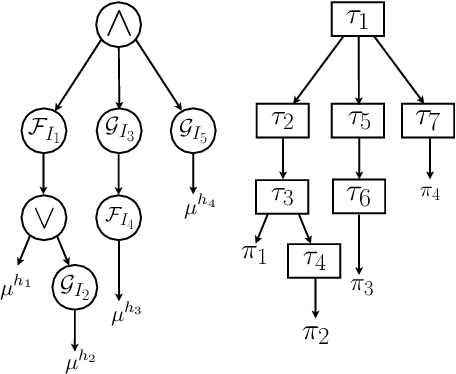
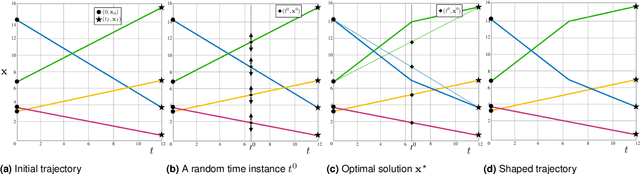
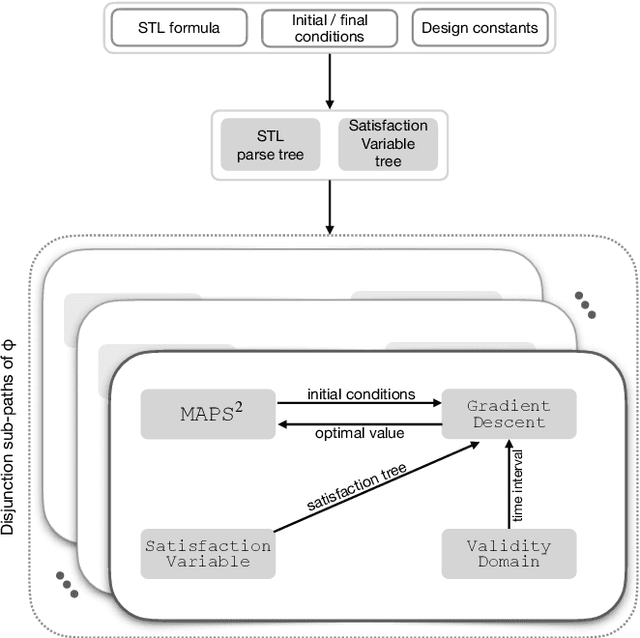
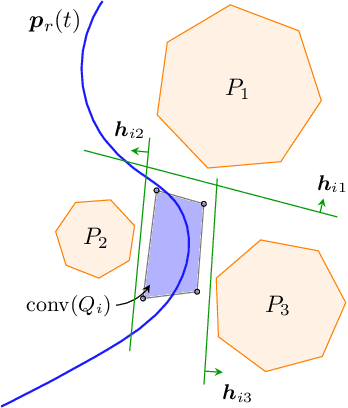
This article presents MAPS$^2$ : a distributed algorithm that allows multi-robot systems to deliver coupled tasks expressed as Signal Temporal Logic (STL) constraints. Classical control theoretical tools addressing STL constraints either adopt a limited fragment of the STL formula or require approximations of min/max operators, whereas works maximising robustness through optimisation-based methods often suffer from local minima, relaxing any completeness arguments due to the NP-hard nature of the problem. Endowed with probabilistic guarantees, MAPS$^2$ provides an anytime algorithm that iteratively improves the robots' trajectories. The algorithm selectively imposes spatial constraints by taking advantage of the temporal properties of the STL. The algorithm is distributed, in the sense that each robot calculates its trajectory by communicating only with its immediate neighbours as defined via a communication graph. We illustrate the efficiency of MAPS$^2$ by conducting extensive simulation and experimental studies, verifying the generation of STL satisfying trajectories.
Kinodynamic Motion Planning via Funnel Control for Underactuated Unmanned Surface Vehicles
Jul 31, 2023
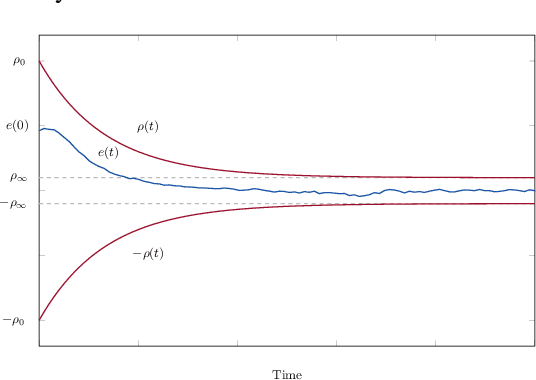
We develop an algorithm to control an underactuated unmanned surface vehicle (USV) using kinodynamic motion planning with funnel control (KDF). KDF has two key components: motion planning used to generate trajectories with respect to kinodynamic constraints, and funnel control, also referred to as prescribed performance control, which enables trajectory tracking in the presence of uncertain dynamics and disturbances. We extend prescribed performance control to address the challenges posed by underactuation and control-input saturation present on the USV. The proposed scheme guarantees stability under user-defined prescribed performance functions where model parameters and exogenous disturbances are unknown. Furthermore, we present an optimization problem to obtain smooth, collision-free trajectories while respecting kinodynamic constraints. We deploy the algorithm on a USV and verify its efficiency in real-world open-water experiments.
Prediction-Based Leader-Follower Rendezvous Model Predictive Control with Robustness to Communication Losses
Apr 03, 2023



In this paper we propose a novel distributed model predictive control (DMPC) based algorithm with a trajectory predictor for a scenario of landing of unmanned aerial vehicles (UAVs) on a moving unmanned surface vehicle (USV). The algorithm is executing DMPC with exchange of trajectories between the agents at a sufficient rate. In the case of loss of communication, and given the sensor setup, agents are predicting the trajectories of other agents based on the available measurements and prior information. The predictions are then used as the reference inputs to DMPC. During the landing, the followers are tasked with avoidance of USV-dependent obstacles and inter-agent collisions. In the proposed distributed algorithm, all agents solve their local optimization problem in parallel and we prove the convergence of the proposed algorithm. Finally, the simulation results support the theoretical findings.
Planning and Control of Multi-Robot-Object Systems under Temporal Logic Tasks and Uncertain Dynamics
Apr 25, 2022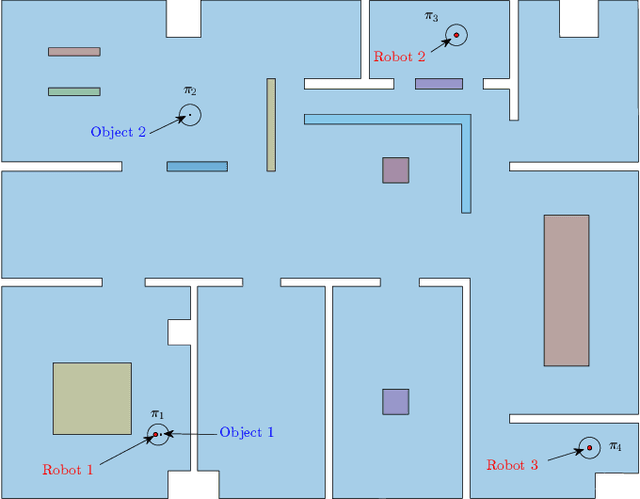

We develop an algorithm for the motion and task planning of a system comprised of multiple robots and unactuated objects under tasks expressed as Linear Temporal Logic (LTL) constraints. The robots and objects evolve subject to uncertain dynamics in an obstacle-cluttered environment. The key part of the proposed solution is the intelligent construction of a coupled transition system that encodes the motion and tasks of the robots and the objects. We achieve such a construction by designing appropriate adaptive control protocols in the lower level, which guarantee the safe robot navigation/object transportation in the environment while compensating for the dynamic uncertainties. The transition system is efficiently interfaced with the temporal logic specification via a sampling-based algorithm to output a discrete path as a sequence of synchronized actions of the robots; such actions satisfy the robots' as well as the objects' specifications. The robots execute this discrete path by using the derived low level control protocol. Simulation results verify the proposed framework.
Non-Parametric Neuro-Adaptive Coordination of Multi-Agent Systems
Oct 11, 2021
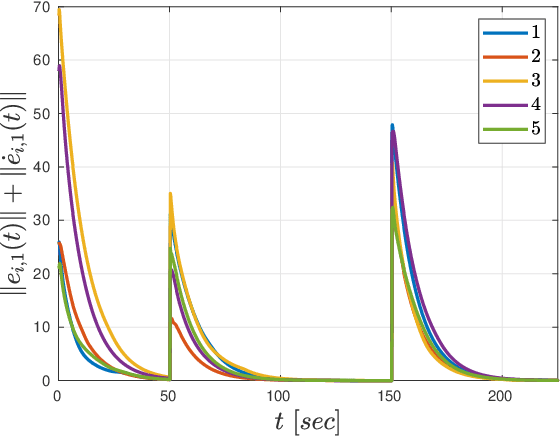
We develop a learning-based algorithm for the distributed formation control of networked multi-agent systems governed by unknown, nonlinear dynamics. Most existing algorithms either assume certain parametric forms for the unknown dynamic terms or resort to unnecessarily large control inputs in order to provide theoretical guarantees. The proposed algorithm avoids these drawbacks by integrating neural network-based learning with adaptive control in a two-step procedure. In the first step of the algorithm, each agent learns a controller, represented as a neural network, using training data that correspond to a collection of formation tasks and agent parameters. These parameters and tasks are derived by varying the nominal agent parameters and the formation specifications of the task in hand, respectively. In the second step of the algorithm, each agent incorporates the trained neural network into an online and adaptive control policy in such a way that the behavior of the multi-agent closed-loop system satisfies a user-defined formation task. Both the learning phase and the adaptive control policy are distributed, in the sense that each agent computes its own actions using only local information from its neighboring agents. The proposed algorithm does not use any a priori information on the agents' unknown dynamic terms or any approximation schemes. We provide formal theoretical guarantees on the achievement of the formation task.
Deceptive Decision-Making Under Uncertainty
Sep 14, 2021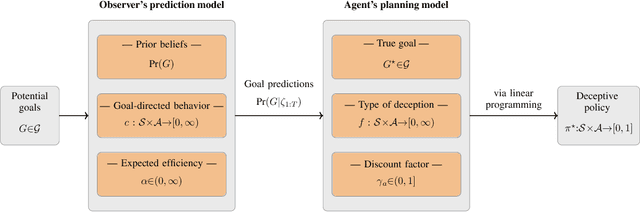
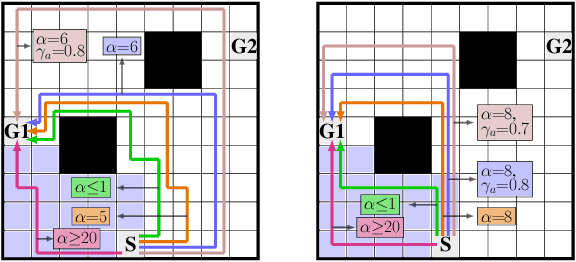
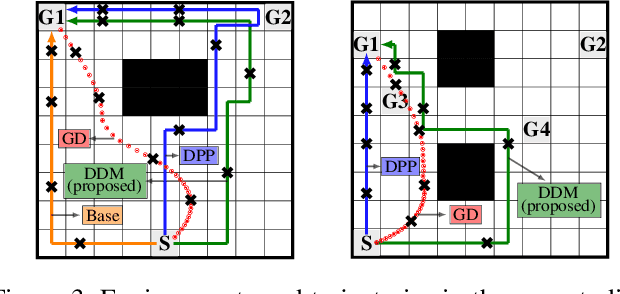
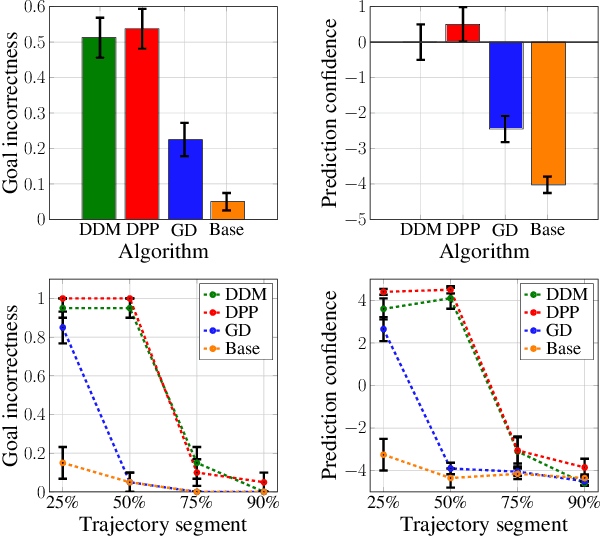
We study the design of autonomous agents that are capable of deceiving outside observers about their intentions while carrying out tasks in stochastic, complex environments. By modeling the agent's behavior as a Markov decision process, we consider a setting where the agent aims to reach one of multiple potential goals while deceiving outside observers about its true goal. We propose a novel approach to model observer predictions based on the principle of maximum entropy and to efficiently generate deceptive strategies via linear programming. The proposed approach enables the agent to exhibit a variety of tunable deceptive behaviors while ensuring the satisfaction of probabilistic constraints on the behavior. We evaluate the performance of the proposed approach via comparative user studies and present a case study on the streets of Manhattan, New York, using real travel time distributions.
Non-Parametric Neuro-Adaptive Control Subject to Task Specifications
Jun 25, 2021
We develop a learning-based algorithm for the control of robotic systems governed by unknown, nonlinear dynamics to satisfy tasks expressed as signal temporal logic specifications. Most existing algorithms either assume certain parametric forms for the dynamic terms or resort to unnecessarily large control inputs (e.g., using reciprocal functions) in order to provide theoretical guarantees. The proposed algorithm avoids the aforementioned drawbacks by innovatively integrating neural network-based learning with adaptive control. More specifically, the algorithm learns a controller, represented as a neural network, using training data that correspond to a collection of different tasks and robot parameters. It then incorporates this neural network into an online closed-loop adaptive control mechanism in such a way that the resulting behavior satisfies a user-defined task. The proposed algorithm does not use any information on the unknown dynamic terms or any approximation schemes. We provide formal theoretical guarantees on the satisfaction of the task and we demonstrate the effectiveness of the algorithm in a virtual simulator using a 6-DOF robotic manipulator.
KDF: Kinodynamic Motion Planning via Geometric Sampling-based Algorithms and Funnel Control
Apr 24, 2021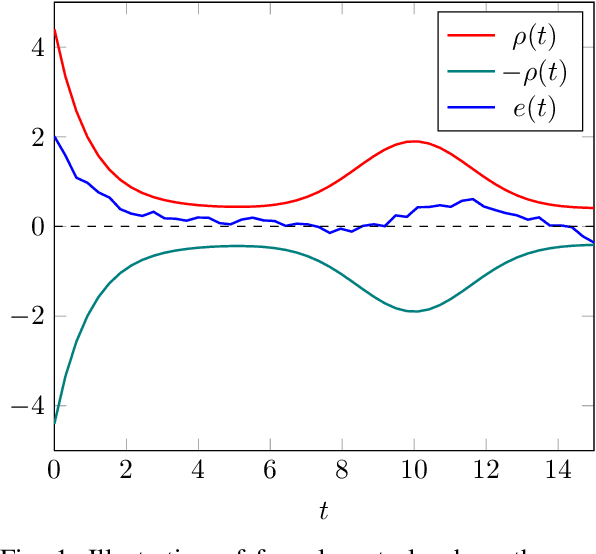


We integrate sampling-based planning techniques with funnel-based feedback control to develop KDF, a new framework for solving the kinodynamic motion-planning problem via funnel control. The considered systems evolve subject to complex, nonlinear, and uncertain dynamics (aka differential constraints). Firstly, we use a geometric planner to obtain a high-level safe path in a user-defined extended free space. Secondly, we develop a low-level funnel control algorithm that guarantees safe tracking of the path by the system. Neither the planner nor the control algorithm use information on the underlying dynamics of the system, which makes the proposed scheme easily distributable to a large variety of different systems and scenarios. Intuitively, the funnel control module is able to implicitly accommodate the dynamics of the system, allowing hence the deployment of purely geometrical motion planners. Extensive computer simulations and experimental results with a 6-DOF robotic arm validate the proposed approach.